要点:
-
Fast R-CNN 属于 Two-stage detector
回归损失参考:https://www.cnblogs.com/wangguchangqing/p/12021638.html
二 Fast R-CNN算法
Fast
R-CNN
是作者
Ross
Girshick
继
R-CNN
后的又一力作。同样使用
VGG16
作为网络的
backbone
,
与R-CNN相比训练时间快9倍,测试推理时间快213倍,准确率从 62%提升至66%
(
再
Pascal
VOC
数据集上
)
。
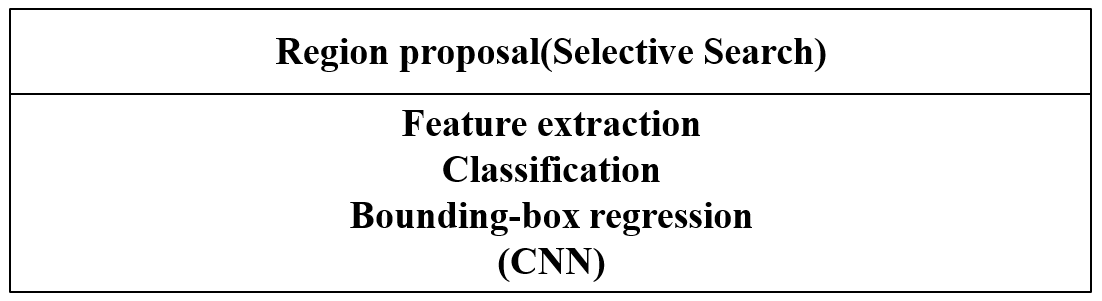
Fast R-CNN算法
流程可分为3个步
骤:
-
一张图像生成1K~2K个 候选区域 ( 使用 Selective Search 方法)
-
将图像输入网络得到相应的 特征图 ,将 SS算法 生成的候选框投影 到特征图上获得相应的 特征矩 阵
-
将每个特征矩阵通过 ROI pooling 层缩放到 7x7大小的特征图 ,接着 将 特征图展平通过一系列全连接层得到预测结 果
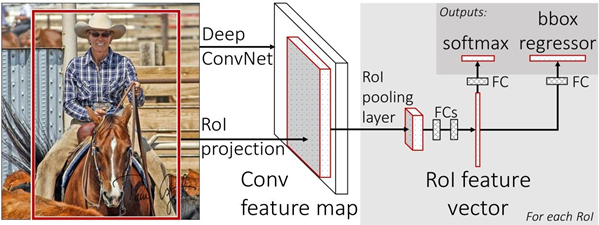
2.1 一次性计算整张图像特征
R-CNN
依次将候选 框区域输入卷积神 经网络得到特征。
Fast-RCNN将整张图像送入网络,紧接着从 特征图像上提取相应的候选区域。这些候选 区域的特征不需要再重复计算。
2.2 RoI Pooling Layer
RoI Pooling Layer(感兴趣区域池化层)是用于从卷积特征图中提取感兴趣区域的一种机制。RoI指的是Region of Interest(感兴趣区域),它是指在输入图像中通过目标检测算法得到的边界框。
RoI Pooling Layer的作用就是将不同大小的RoI区域映射为相同大小的输出。具体来说,它首先将每个RoI区域划分成固定大小的子区域,然后对每个子区域做最大池化操作,得到一个固定大小的输出。这样做的好处是可以保证不同大小的RoI区域都能够被处理,并且将它们映射为相同大小的输出特征图,便于后续的分类和回归任务。不限制输入图像的尺寸
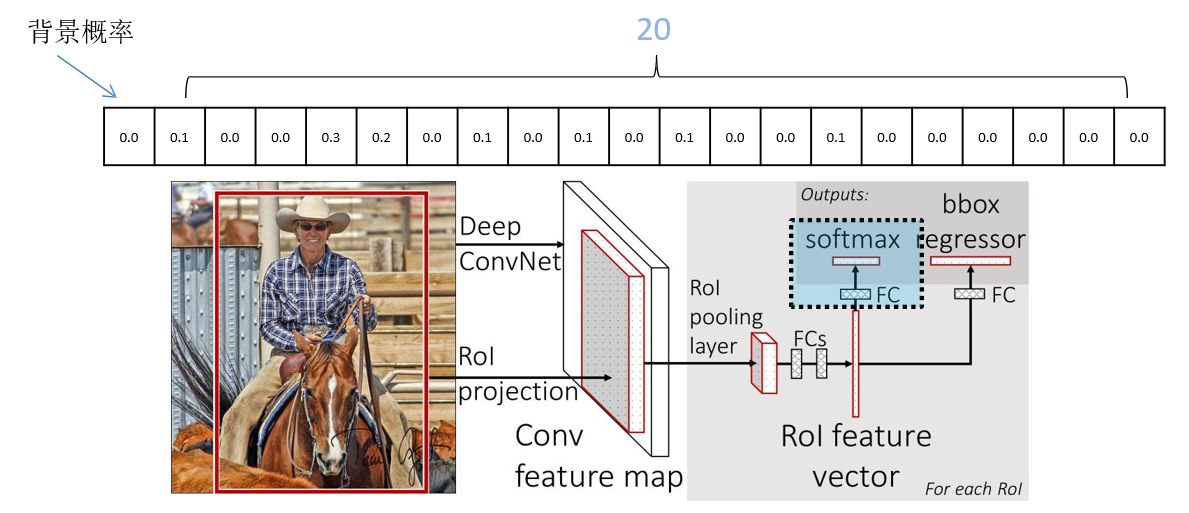
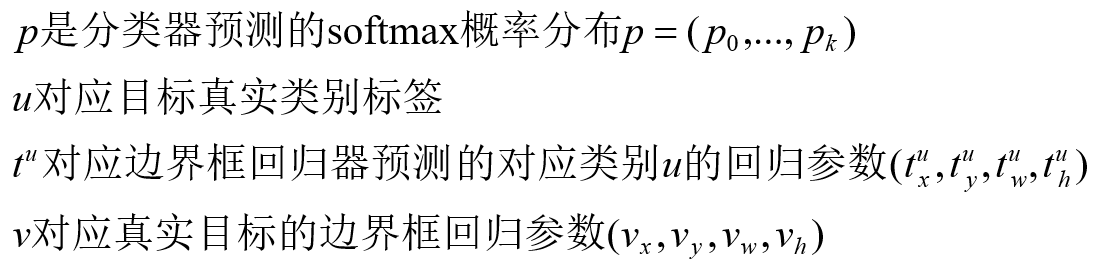
2.3 分类器
输出N+1个类别的概率(N为检测目标的种类, 1为背景)共N+1个节点
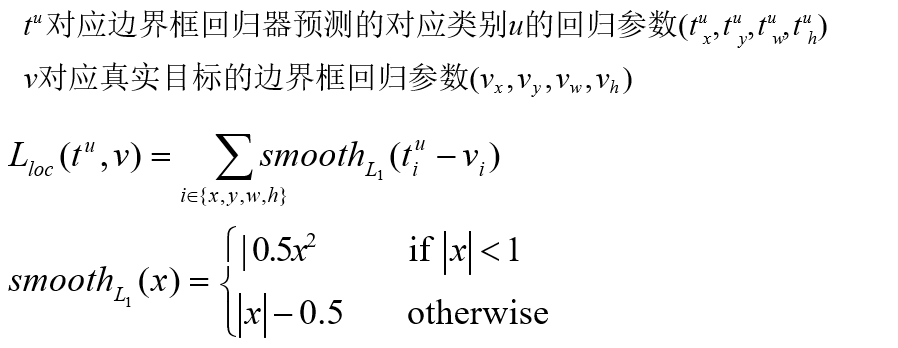
2.4 边界框回归器
输出对应N+1个类别的候选边界框回归参数(dx, dy, dw, dh),共(N+1)x4个节点
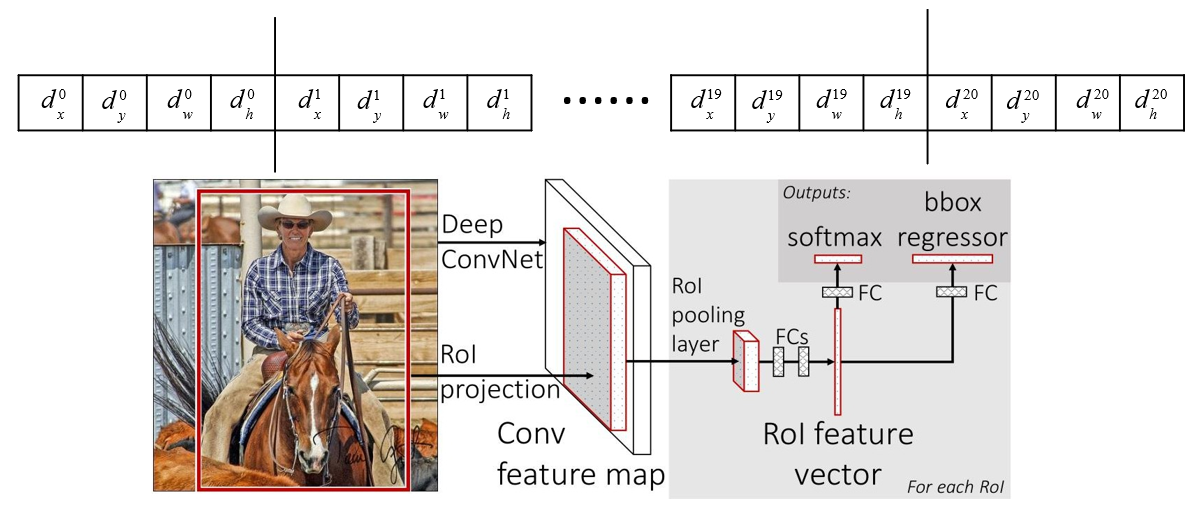
边界框回归器
输出对应N+1个类别的候选边界框回归参数(),共(N+1)x4个节点
分别为候选框的中心x,y坐标,以及宽高
分别为最终预测的边界框中心x,y坐标,以及宽高
2.5 Multi-task loss

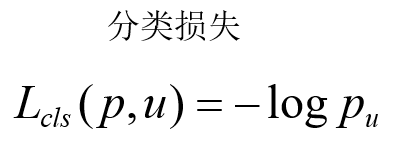
2.6 Cross Entropy Loss 交叉熵损失
1. 针对多分类问题(softmax输出,所有输出概率和为1)
![]()
2. 针对二分类问题(sigmoid输出,每个输出节点之间互不相干)

![]()
2.7 Fast R-CNN框架