深度学习在人脸识别中的应用
人脸识别的过程包括:
- 人脸检测
- 人脸对齐
- 特征提取(在数学上,实质上是:空间变换)
- 特征度量
其中,特征提取与度量,是人脸识别问题中的关键问题,也是相关研究的难点之一。
传统方法在人脸识别中的弱点
传统人脸识别方法,主要利用了手工特征对面部信息进行归纳提取,将人脸图像变换到新的空间进行辨识比对。
而实际场景中人脸的多样性(妆容、光照、角度、配饰、表情、年龄变化等)信息,导致了手工特征无法稳健地获取人脸识别的特征。
对此,传统方法的解决方案多为对图像进行预处理,包括去噪、白平衡、人脸对齐等等,但由于特征的表达能力较弱,因此性能较为受限。
人脸识别在深度学习中是一个什么问题?
首先,CNN的经典模型,如Resnet,VGG等,是一个典型的分类模型。
例如,手写数字识别问题中,共60000张训练图像,和10个类别。
用这些图像,将模型训练为一个十分类的问题。
然而,这种模型适合用于人脸识别吗?
人脸识别在分类问题中的局限性
在实际场景中,人脸识别往往不能作为一个分类问题看待。
其中主要原因是,我们很难为每个人都采集足够多的训练图像作为训练(可以用视频采集[1])
而且,即便我们为每个人都采集了大量的训练图像,也很难训练一个大规模的分类模型--因为类别太多了,特征空间太拥挤。
以CelebA为例,该数据集和mnist的对比如下
| 数据集 | mnist | CelebA |
|---|---|---|
| 类别 | 10 | 10,177 |
| 单类图像数量 | 6,000 | |
| 单类图像数量最大 | 6,000 | 73 |
| 单类图像数量最小 | 6,000 | 2 |
显然,这样的数据集不足以支撑我们用分类模型训练一个分类器。
实际场景中的人脸识别问题
实际场景中的人脸识别,通常有两个场景
- 人脸验证, 1v1, 手机解锁
- 人脸识别, 1vN, 打卡签到
无论哪个场景,都需要进行一个步骤,即人脸的两两匹配。
因此,归根结底,人脸识别都是一个特征匹配的问题。
而我们需要准确的提取人脸图像的特征,令其类内距离尽可能地小,类间距离尽可能地大。
问题在于:在无法充分训练CNN的前提下,如何利用它得到一个精确的特征提取器?
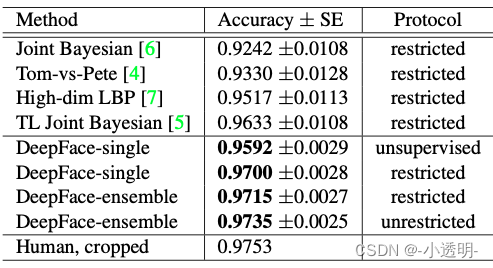
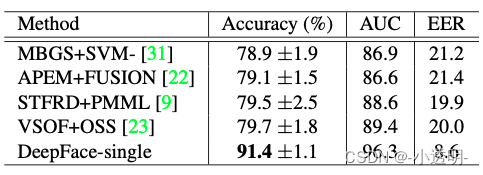
人脸识别在深度学习中的第一个里程碑--DeepFace[2]
deepface是2014年facebook出品,首次在人脸识别领域中取得了超越人类的性能。
模型结构
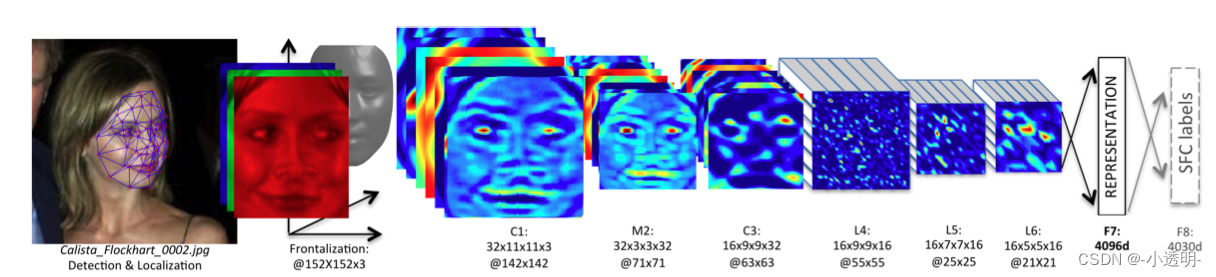
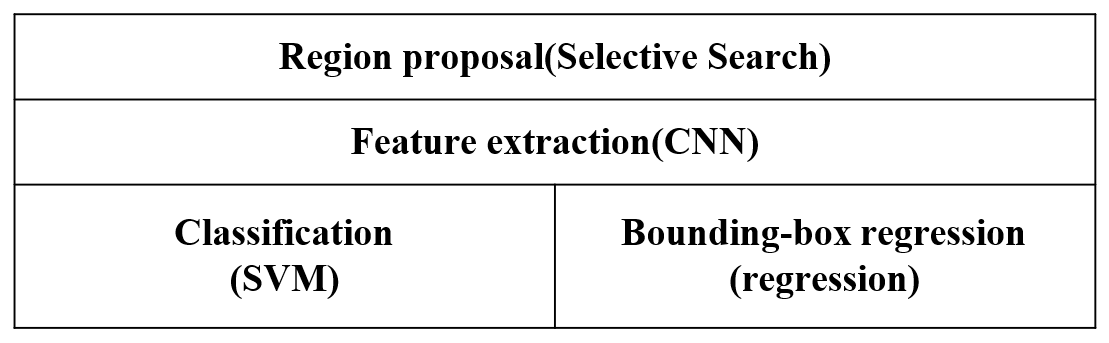
该工作具有典型的早期CNN的研究风格,采用分类的思路来训练模型
使用的数据集为SFC(social face classification),共440万张图像,4030个类别,每个人都有800至1200张图像。
这样的数据集足够训练一个CNN模型(一百万级参数)
人脸对齐
除了训练模型之外,他还采用了人脸对齐的方案,具体过程如下:
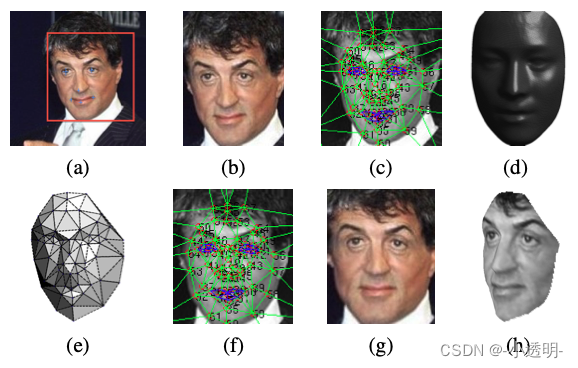
Step1. 人脸检测
采用LBP+SVR来检测出人脸。其中,SVR是一种回归算法,通过LBP特征的输入,来训练一个SVR模型,用于估计人脸检测结果。
其中SVR的原理与SVM大致相同,优化思想都是离超平面最近的点到该超平面的距离最大。
不同的在于,SVR是一个回归模型,优化目标额外增加了超平面与数据之间的误差最小
Step2. 人脸对齐
- 迭代6个点(2个眼镜,1个鼻子,3个嘴巴)
先对上述求得的六个基准点进行迭代,找到精确的六个点
(当迭代后与迭代前点的差距小于某个阈值时,停止迭代)
- 找到67个点
使用第二个SVR,定位出人脸的67个基准点
- 基于67个点,进行Delaunay三角化进行编号
具体来说,给定一个点集,Delaunay三角剖分算法会生成一个相应的三角形网格,其中每个三角形的外接圆内不包含任何点。
技术分享:Delaunay三角剖分算法介绍 - 知乎一.什么是Delaunay三角剖分从事数值计算相关领域的读者,相信或多或少都听说过“三角剖分”这个概念。在诸如有限元仿真,光线追踪渲染等计算当中,都需要把几何模型转化为三角网格数据,即“三角网格生成”。在这…![]() https://zhuanlan.zhihu.com/p/459884570
https://zhuanlan.zhihu.com/p/459884570
- 人脸3d映射
编号后,通过一个平均3d人脸,得到一个当前人脸对于3D人脸的映射,并根据三角剖分获得3d人脸三角网
- 角度偏转
将3d人脸三角网偏转至正面,以获得正向人脸。最终降维到2d空间,得到人脸正视图。
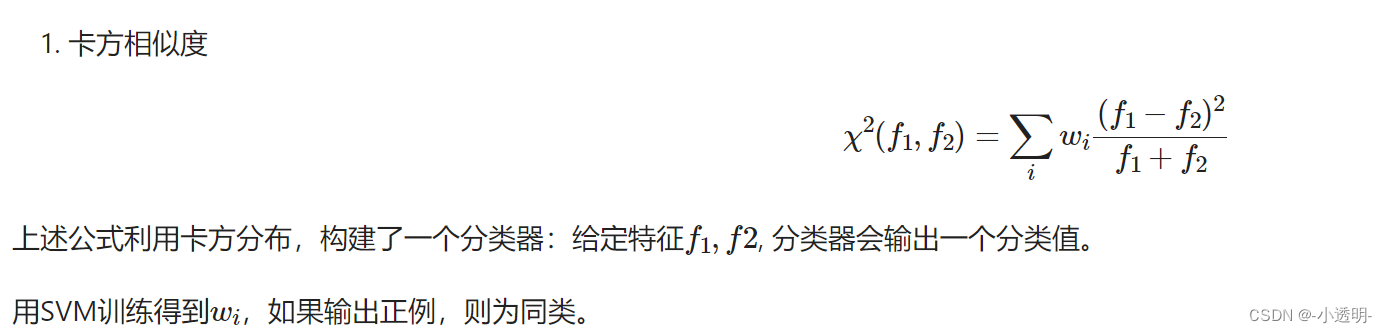
人脸验证
针对人脸验证场景,输入两个实例,判断他们是否为同一个人。
其中,采用无监督的方式,就可以直接对提取到的特征做内积(cos)。
阈值通常设置大一点(接近于1),因为人脸检测数据分布不平衡,负例远远大于正例(假阳性大)
这种方法也是CNN早期作为特征提取器使用的主要方式之一。
而有监督的方式则是可采用训练的方式,将特征映射到新的空间,让类间距离变大,类内距离变小
具体论文中,提到了两种方式:
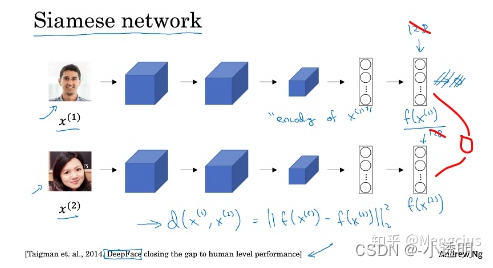
- 孪生网络
上述模型两路参数共享,将输出的特征映射为一个逻辑单元
实验结果
现代人脸识别研究的主要趋势
现代人脸识别问题,主要的核心在于如何将不同的人脸,在特征空间中有效区分开来。
例如,利用siamese network,[学习到不同类的区别] 就是一种典型的度量学习策略。
这种度量学习,通常采用对比损失作为损失函数,其目标是判断输入的两个实例,是/不是一类。
虽然这种方式能够将类间距离加大,但对于类内距离的减小,作用有限。
对此,人们又提出了三元组损失。
yij = 1(i,j同一类)-->d尽可能小;反之,尽可能大
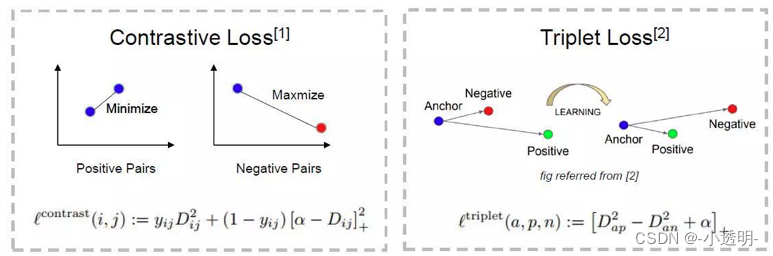
三元组损失函数可以在加大类间距离的同时,拉近类内距离。因此,获得了较好的结果[3]。
在google提出的FaceNet中,人脸识别的准确率在LFW上,达到了98.87/%, 如果使用了额外的对齐手段,准确率还能继续提升一个点。
然而,加入三元组损失的问题在于模型训练成本增加。
解决方案包括:先用常规训练得到基本模型,然后再用三元组进行fine tuning,或者是改变simple的方式,把一些较难辨识的类别特殊处理等等。
备注:deepface经过多年迭代,已经可以实现多种人脸相关的内容,并且封装成了成熟的工具。地址![]() https://github.com/serengil/deepface
https://github.com/serengil/deepface
另一种优化人脸识别的思路--SphereFace
人脸识别模型的本质是,令类内最大距离小于类间最小距离
之前的思路都是采用各种优化训练方法,比如siamese,tripplet等。
而sphereface则采用了一种不同的思路:“通过更加严苛的分类损失,来得到更加泛化的模型,从而获取更加discrimintive的embeding”
A-softmax
sphereface认为,训练人脸的最终目的是要令类内距离小于与其他类间的距离。
而已有模型不能做到的原因之一,是因为softmax分类能力不够强力。
也就是说,他不能将同类样本充分聚合,只是粗略地用一个平面划分样本
softmax回顾
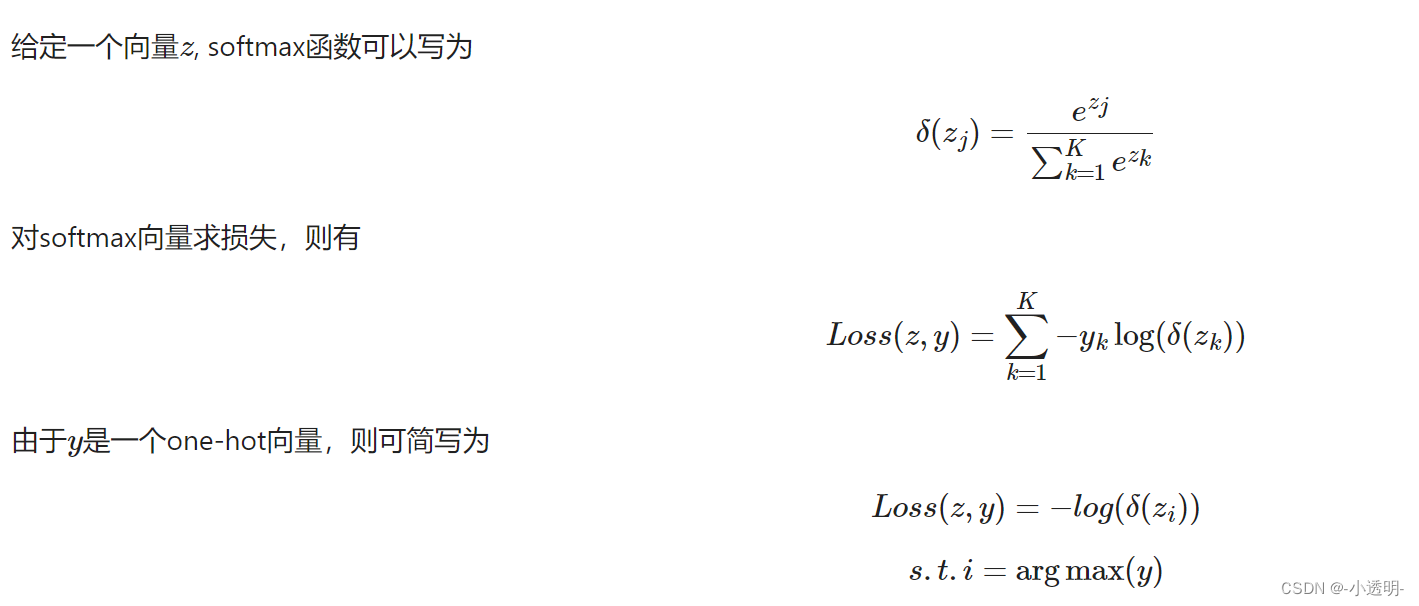

上述过程中,通过一个分界平面将两类数据区分开来。
上述的softmax损失中,确定的分类平面并未对类间距离进行约束,因此,达不到预期效果。


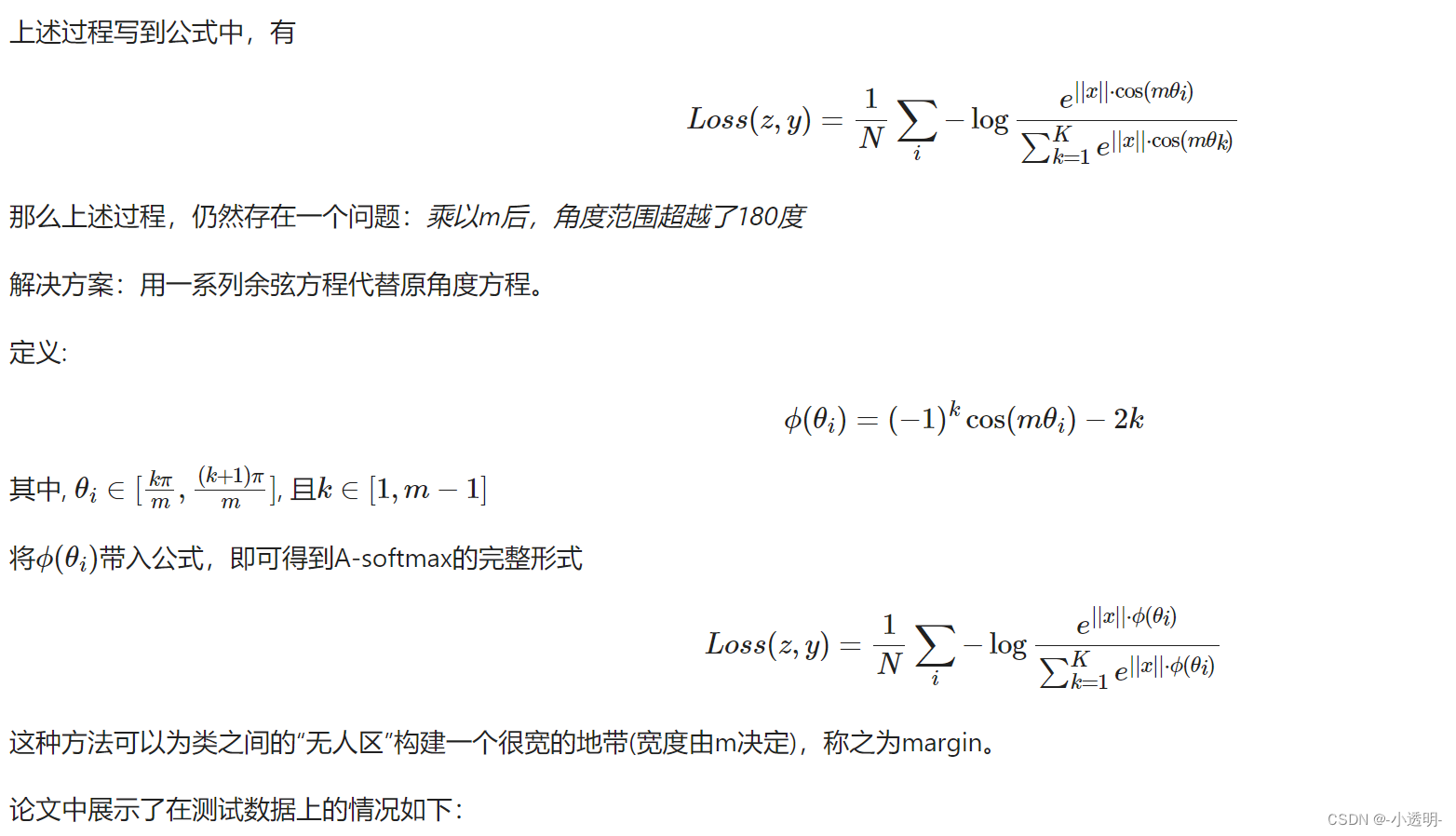
此图中,是引入了角度信息的softmax,但并未对特征空间进行归一化。给定一个角度,以及偏置b,就可以得到一个分界平面
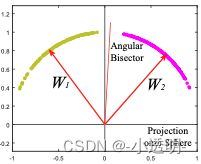
此图中,通过对特征空间进行归一化,可以得到一个分界平面。
相比较于传统的softmax,这个方法能够将不同类的数据较好的分开。
但是,依然没有达到,类间距离大于全部类内距离。
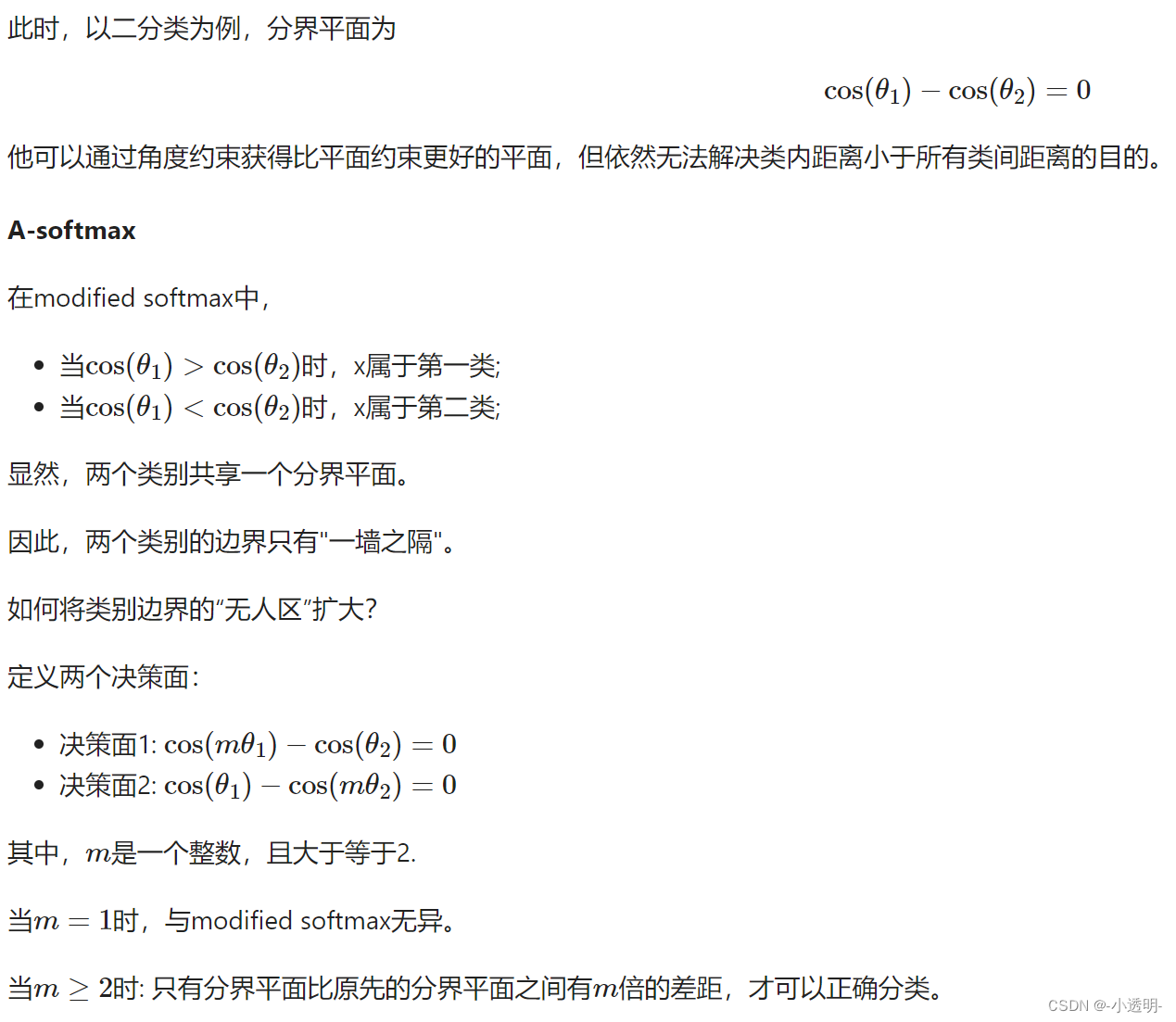
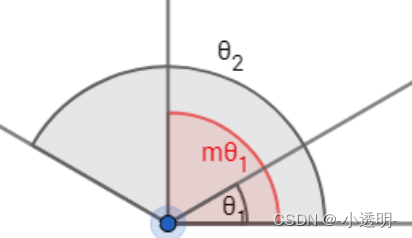
拓展 m的取值对于训练的难度和最终的效果至关重要。
当m较小的时候,与普通方法无异;
当m较大的时候,每个类别的内部数据被压缩的很小。但由于噪声误差的存在,导致训练难以进行。
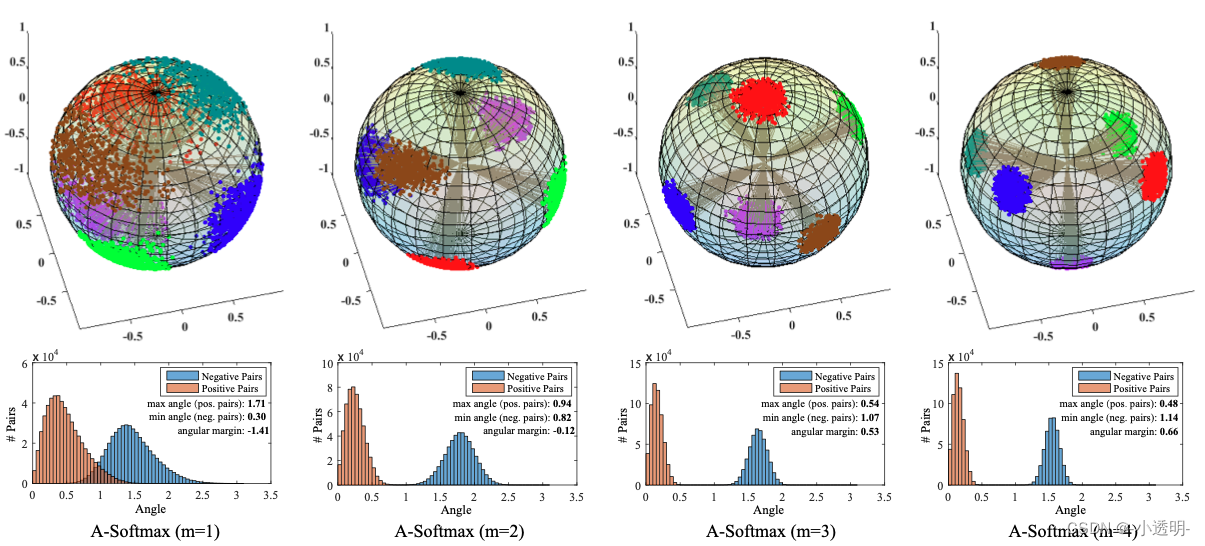
论文通过严格的数学证明,得到结论为:
- 在二分类下,当 m≥2+根号3 时,类间的距离大于类内距离
- 在多分类的情况下,m≥3 能保证类间的距离大与类内的距离
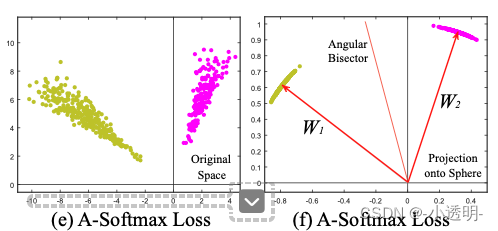
论文实际测试取的4.
关于A-softmax的直观解释:
每个样本点都是在球面上的映射;
训练时,每次迭代都是一个“鱼找鱼虾找虾”的场景:即同类会慢慢的聚集,从而不同类也会慢慢离散;
然而,如果不对类间距离加以特殊限制,则会导致聚集不够彻底,弥散的类别存在相互重叠的情况;
因此,m可以认为是一个控制聚集程度的参数:参数越大,导致聚集越彻底,因此和其他类的间隙也就越大。
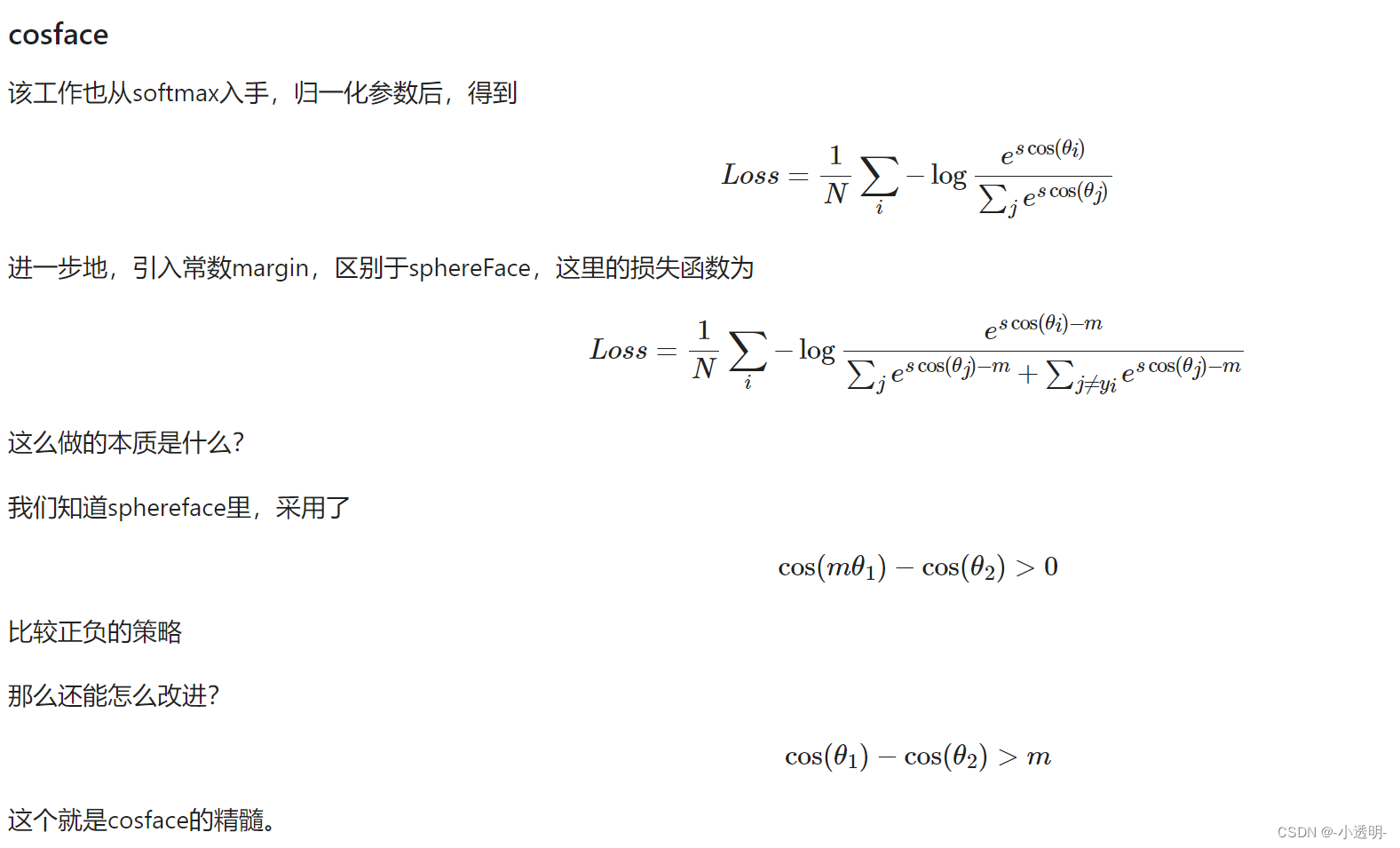
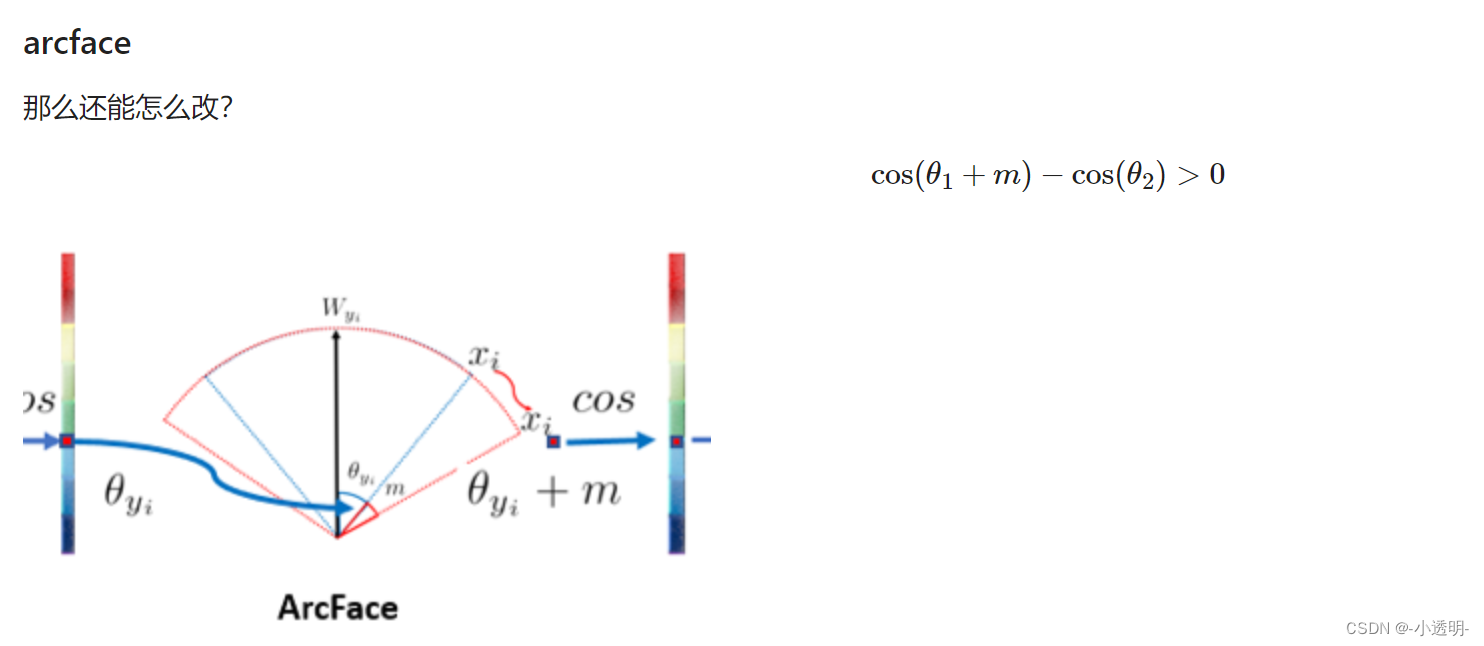
后续的其他工作思路