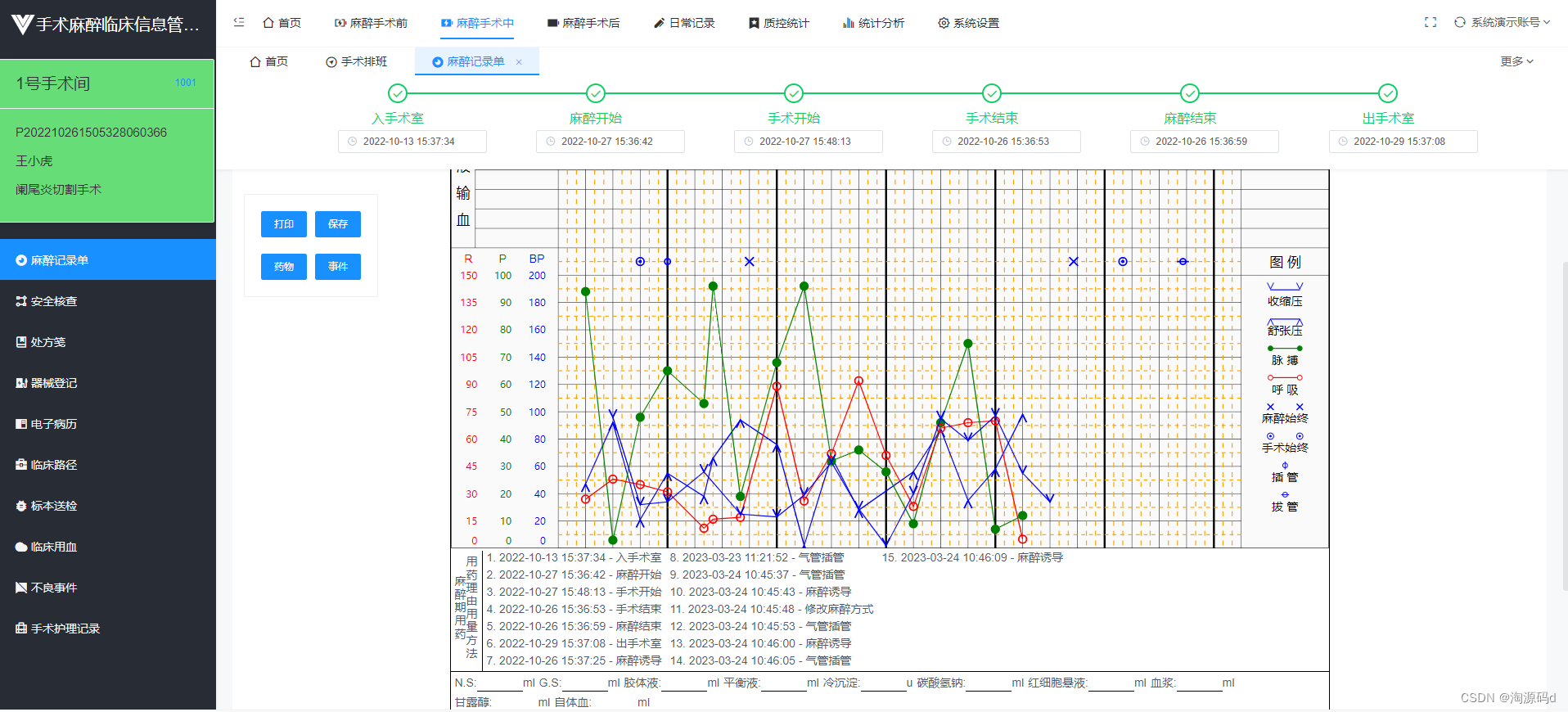
采用计算机和通信技术,实现监护仪、麻醉机、呼吸机、输液泵等设备输出数据的自动采集,采集的数据能够如实准确地反映患者生命体征参数的变化,并实现信息高度共享,根据采集结果,综合其他患者数据,自动生成手术麻醉相关医疗文书,以达到提高工作效率的目的。通过该系统的实施,能够规范麻醉科的工作流程、实现麻醉手术过程中的信息数字化和网络化、自动生成各种医疗文书、完整共享HIS、LIS和PACS 等患者信息,实现医疗过程电子化管理,从而提高科室管理工作的水平。

手术麻醉系统业务流程:
科室医生在某时间之前填写次日手术通知单并提交。
手术室护士长进行手术排班安排(包括麻醉医师、洗手护士、巡回护士、手术间、台次等),如果时间上没冲突,护士长对此例手术进行确认,并发送短信到科室医生手机,提示科室医生他的手术申请已通过。
如果手术无法安排,护士长可以退回该手术申请,并发短信到科室医生手机,提示科室医生他的手术无法安排,并给予退回原因.
手术排班完成之后,到次日病人交接之前,该例手术安排的麻醉医师到科室病房做术前访视,并填写术前访视记录单、麻醉知情同意书、特殊药物使用知情同意书。
次日手术开始之前,巡回护士到科室病房去做交接病人,巡回护士用科室病房的 PDA 登陆系统,扫描病人腕带,填写术前交接单。交接完成后,巡回护士把病人带到手术室,做好手术准备。
麻醉实施前护士登陆系统扫描病人腕带,确认病人身份,然后麻醉医生,手术医生,护士一起进行麻醉前手术安全核查,并填写手术安全核查记录单。
在手术开始之前护士还要进行手术器械物品的清点工作,填写清点记录单。
这时还需要麻醉医生,手术医生,护士一起进行第二次(手术开始前)手术安全核查,填写手术安全核查记录单。
在手术关闭开刀伤口前,这时护士进行手术清点(关前核对),填写手术清点记录单。
在手术关闭开刀伤口后,这时护士还要再次进行手术清点(关后核对),填写手术清点记录单。
手术结束后,在病人离开手术室前,麻醉医生,手术医生,护士一起进行最后一次手术安全核查,填写手术安全核查记录单。
术后病人送入 PACU,等待病人醒来,填写麻醉复苏单。
术后,护士填写手术护理单,麻醉医师填写术后总结并进行术后随访及术后镇痛记录。