前言:MPU6050是一款强大的六轴传感器,需要理解MPU6050首先得有IIC的基础,MPU6050 内部整合了 3 轴陀螺仪和 3 轴加速度传感器,并且含有一个第二 IIC 接口,可用于连接外部磁力传感器,内部有硬件算法支持.
1.IO分配(MPU6050模块)
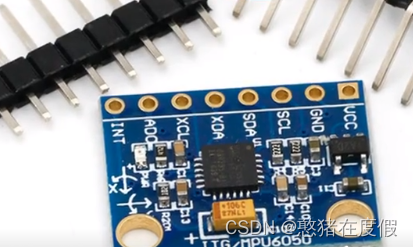
1. SCL 和 SDA 是连接 MCU 的 IIC 接口, MCU 通过这个 IIC 接口来控制 MPU6050,
另外还有一个 IIC 接口
2.AUX_CL 和 AUX_DA,这个接口可用来连接外部从设备,比如磁传感
器,这样就可以组成一个九轴传感器。
3.AD0 是从 IIC 接口(接 MCU)的地址控制引脚,该引脚控制 IIC 地址的最低位。如果接 GND,则 MPU6050 的 IIC 地址是: 0X68,如果接 VDD,则是 0X69.
2.MPU6050初始化(PA15 接 AD0 = GND)
注意:PA15默认是JTAG引脚,使用PA15时,需要使用IO的重映射功能。
(1)设置MPU6050的地址(AD0的电平)
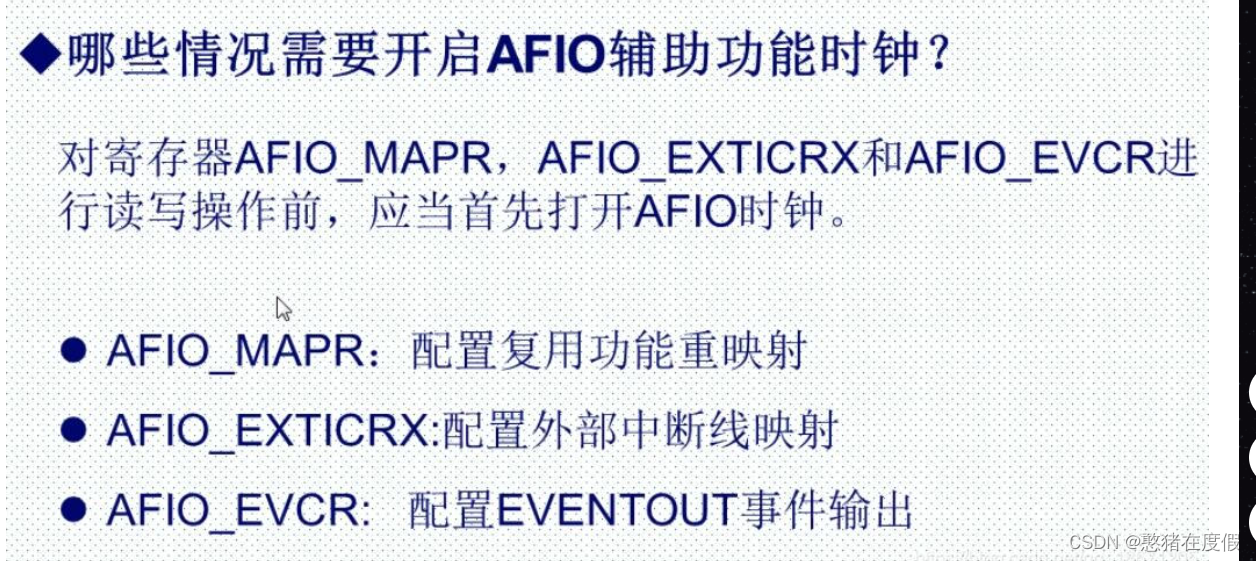
RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO,ENABLE);//打开辅助功能时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_15; //
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_Init(GPIOA, &GPIO_InitStructure);
GPIO_PinRemapConfig(GPIO_Remap_SWJ_JTAGDisable,ENABLE);
MPU_AD0_CTRL=0; //设置为低电平 注:这里使用PA15是默认是JTAG引脚 ,需要重映射。
(2)完成IIC的初始化
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);//ÏÈʹÄÜÍâÉèIO PORTBʱÖÓ
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10|GPIO_Pin_11; // ¶Ë¿ÚÅäÖÃ
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; //ÍÆÍìÊä³ö
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //IO¿ÚËÙ¶ÈΪ50MHz
GPIO_Init(GPIOB, &GPIO_InitStructure); //¸ù¾ÝÉ趨²ÎÊý³õʼ»¯GPIO
GPIO_SetBits(GPIOB,GPIO_Pin_10|GPIO_Pin_11); //PB10,PB11 Êä³ö¸ß (3)配置MPU6050的设置
MPU_IIC_Init();//初始化IIC总线
MPU_Write_Byte(MPU_PWR_MGMT1_REG,0X80); //复位MPU6050
delay_ms(100);
MPU_Write_Byte(MPU_PWR_MGMT1_REG,0X00); //唤醒MPU6050
MPU_Set_Gyro_Fsr(3); //陀螺仪传感器,±2000dps
MPU_Set_Accel_Fsr(0); //加速度传感器,±2g
MPU_Set_Rate(50); //设置采样率50Hz
MPU_Write_Byte(MPU_INT_EN_REG,0X00); //关闭所有中断
MPU_Write_Byte(MPU_USER_CTRL_REG,0X00); //I2C主模式关闭
MPU_Write_Byte(MPU_FIFO_EN_REG,0X00); //关闭FIFO
MPU_Write_Byte(MPU_INTBP_CFG_REG,0X80); //INT引脚低电平有效
res=MPU_Read_Byte(MPU_DEVICE_ID_REG);
if(res==MPU_ADDR)//器件ID正确
{
MPU_Write_Byte(MPU_PWR_MGMT1_REG,0X01); //设置CLKSEL,PLL X轴为参考
MPU_Write_Byte(MPU_PWR_MGMT2_REG,0X00); //加速度与陀螺仪都工作
MPU_Set_Rate(50); //设置采样率为50Hz
}注:这里配置MPU6050的操作,都是通过IIC协议,直接对MPU6050的寄存器进行访问.
这里提供一个芯片初始化是否成功的小技巧,通常每个芯片都有自己的芯片ID,通常可以把初始化函数设置为u8类型,通过读取ID是否正确,返回不同类型的值(return 1或0),如:while(mpu_dmp_init())
3.MPU6050通信协议分析
发送一个字节
(1)MCU发送一个起始信号。
(2)传输从机7位地址+读/写位,等待应答信号
(3)发送寄存器地址,等待应答
(4)发送1个字节数据,等待应答
(5)结束信号
使用IIC写一个字节数据,程序如下:
u8 MPU_Write_Byte(u8 reg,u8 data)
{
MPU_IIC_Start();
MPU_IIC_Send_Byte((MPU_ADDR<<1)|0);//发送器件地址+写命令
if(MPU_IIC_Wait_Ack()) //等待应答
{
MPU_IIC_Stop();
return 1;
}
MPU_IIC_Send_Byte(reg); //写寄存器地址
MPU_IIC_Wait_Ack(); //等待应答
MPU_IIC_Send_Byte(data);//发送数据
if(MPU_IIC_Wait_Ack()) //等待ACK
{
MPU_IIC_Stop();
return 1;
}
MPU_IIC_Stop();
return 0;
}读取IIC多个字节数据
u8 MPU_Read_Len(u8 addr,u8 reg,u8 len,u8 *buf)
{
MPU_IIC_Start();
MPU_IIC_Send_Byte((addr<<1)|0);//发送器件地址+写命令
if(MPU_IIC_Wait_Ack()) //等待应答
{
MPU_IIC_Stop();
return 1;
}
MPU_IIC_Send_Byte(reg); //写寄存器地址
MPU_IIC_Wait_Ack(); //等待应答
MPU_IIC_Start();
MPU_IIC_Send_Byte((addr<<1)|1);//发送器件地址+读命令
MPU_IIC_Wait_Ack(); //等待应答
while(len)
{
if(len==1)*buf=MPU_IIC_Read_Byte(0);//读数据,发送nACK
else *buf=MPU_IIC_Read_Byte(1); //读数据,发送ACK
len--;
buf++;
}
MPU_IIC_Stop(); //产生一个停止条件
return 0;
}代码连接:
链接:https://pan.baidu.com/s/1SKYUonB0yKy9iG6hjabvGQ?pwd=a81l
提取码:a81l