一、前言
现代飞机通常随身携带雷达警告接收器 (RWR)。RWR检测到雷达发射,并在雷达信号照射到飞机上时警告飞行员。RWR不仅可以检测雷达发射,还可以分析截获的信号并编目信号来自哪种雷达。此示例显示了 RWR 如何估计截获脉冲的参数。该示例模拟了地面监视雷达(发射器)和配备 RWR 的飞行飞机(目标)的场景。RWR拦截雷达信号,从截获的脉冲中提取波形参数,并估计发射器的位置。提取的参数可以被飞机用来采取对策。
此示例需要图像处理工具箱™。
二、介绍
RWR是一种被动电子战支持系统[1],可及时向飞行员提供有关其RF信号环境的信息。RWR拦截撞击信号,并使用信号处理技术提取有关截获波形特性以及发射器位置的信息。此信息可用于调用对策,例如干扰以避免被雷达检测到。下图描述了雷达和飞机之间的相互作用。
此示例模拟具有地面监视雷达和具有 RWR 的飞机的场景。RWR检测雷达信号,并从截获的信号中提取以下波形参数:
脉冲重复间隔
中心频率
带宽
脉冲持续时间
到达方向
发射器的位置
RWR链由相控阵天线、信道化接收器、包络检测器和信号处理器组成。截获信号的频带由信道化接收器和包络检测器估计,然后将检测到的子带状信号馈送到信号处理器。将波束转向应用于该子带信号的到达方向,并使用伪Wigner-Ville变换和Hough变换估计波形参数。使用到达角和单基线方法,还可以估计发射器的位置。
三、场景设置
假设地面监视雷达在L波段工作,发射3μs脉冲重复间隔为 15 时的持续时间μs.发送的线性调频带宽为30 MHz,载波频率为1.8 GHz。监视雷达位于原点并且是静止的,飞机以200 m / s(~0.6 Mach)的恒定速度飞行。
雷达的发射天线是8×8均匀矩形相控阵,间距L/2在其元素之间。信号从雷达传播到飞机,并由RWR拦截和分析。为简单起见,选择波形为峰值功率为 100 W 的线性 FM 波形。
地面监视雷达不知道目标的方向,因此,它需要扫描整个空间来寻找飞机。通常,雷达会在移动到下一个方向之前在每个方向传输一系列脉冲。因此,在不失去通用性的情况下,此示例假设雷达向零度方位角和仰角传输。下图显示了四脉冲列车到达飞机的时间频率表示。请注意,尽管脉冲序列到达特定的延迟,但第一个脉冲到达的时间延迟与RWR无关,因为它没有知识传输时间,并且必须不断监控其环境。

RWR 配备一个 10 x 10 的均匀矩形阵列,间距为L/2在其元素之间。它在整个 L 波段工作,中心频率为 2 GHz。RWR 侦听环境,并不断将收集的数据馈送到处理链中。
四、RWR 包络检测器
RWR 中的包络检测器负责检测是否存在任何信号。当RWR持续接收数据时,接收器链缓冲并将接收到的数据截断为50μs段。
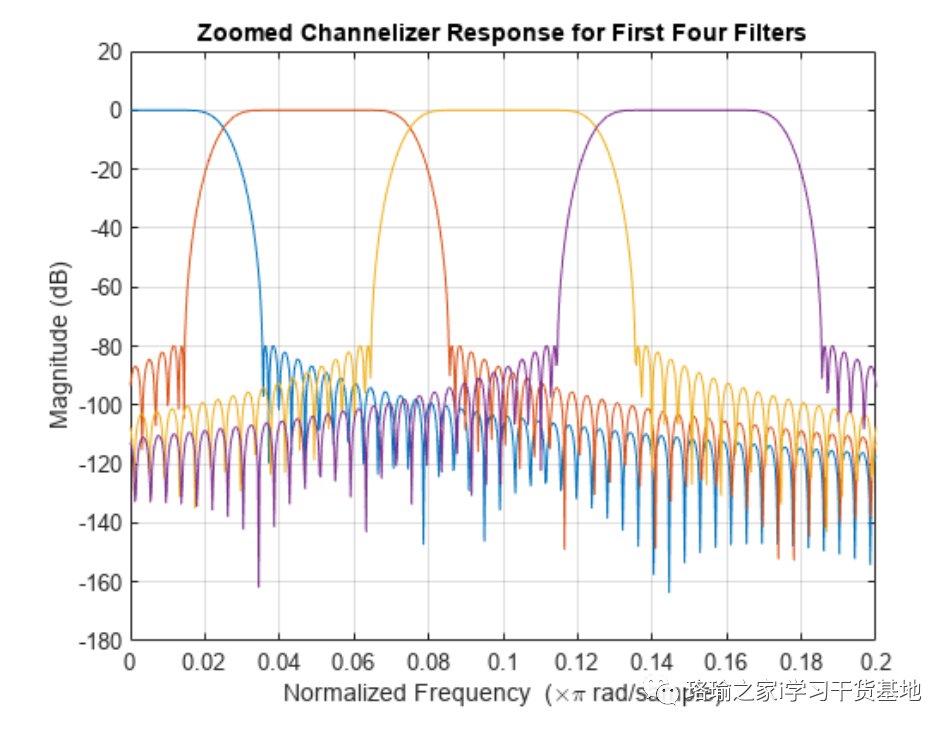
由于RWR不知道发射波形中使用的确切中心频率,因此它首先使用一组滤波器,每个滤波器调谐到略有不同的RF中心频率,将接收的数据划分为子频段。然后在每个频段应用包络检测器以检查信号是否存在。在本例中,信号被划分为100 MHz带宽的子带。这种操作的另一个好处是,每个子带中的信号可以下采样至100 MHz的采样频率,而不是对RWR覆盖的整个带宽进行采样。
此图显示了滤波器组创建的前四个波段。
接收到的数据 具有三个维度。第一维表示快速时间,第二维表示子带,第三维对应于接收数组的接收元素。对于此示例中使用的 RWR 的 10 x 10 天线配置,您有 100 个接收元件。由于发射功率低,接收噪声高,雷达信号与噪声无法区分。因此,在这些元件上对接收功率求和,以增强信嗅比(SNR),并更好地估计每个子带中的功率。具有最大功率的频段是雷达使用的频段。

五、RWR 信号处理器
尽管所选频段的功率高于相邻频段,但频段内的SNR仍然较低,如下图所示。
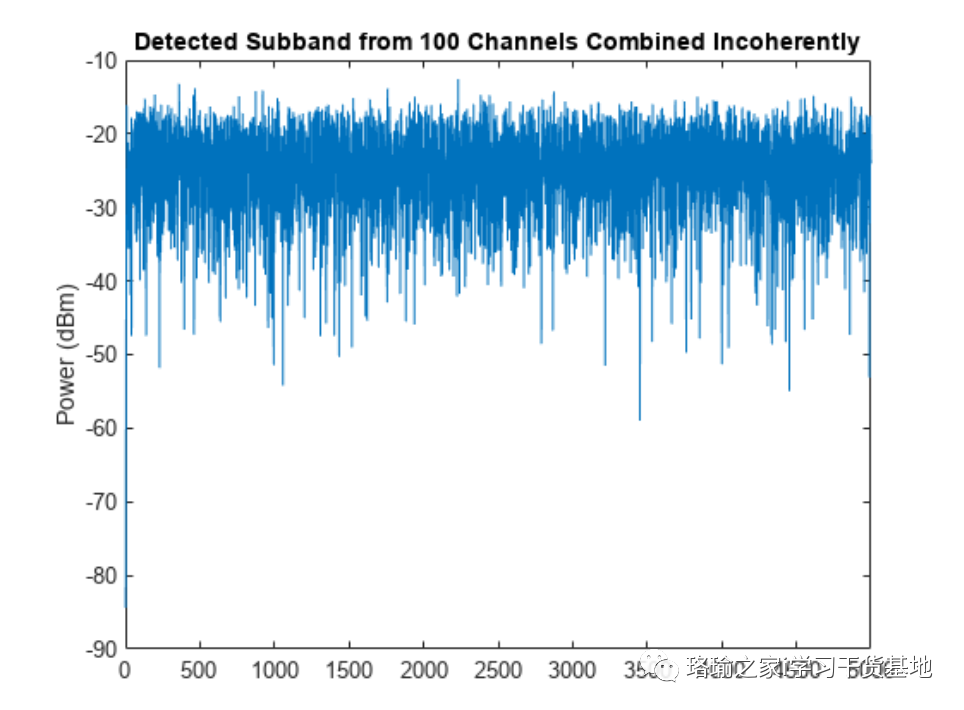
现在是一个二维矩阵。第一维表示快速时间样本,第二维是跨 100 个接收天线通道的数据。计算检测到的子带起始频率以找到检测到的信号的载波频率。subData
RWR的下一步是找到无线电波到达的方向。该到达角信息将用于将接收天线波束引导到发射器的方向,并使用单基线方法将发射器定位在地面上。RWR使用二维音乐估计器估计到达方向。波束控制是使用相移波束成形器完成的,以实现信号的最大SNR,从而有助于波形参数提取。
假设地平面是平坦的,并且平行于坐标系的 xy 平面。然后,RWR可以使用飞机高度计读数中的高度信息以及到达方向对发射器的位置进行三角测量。
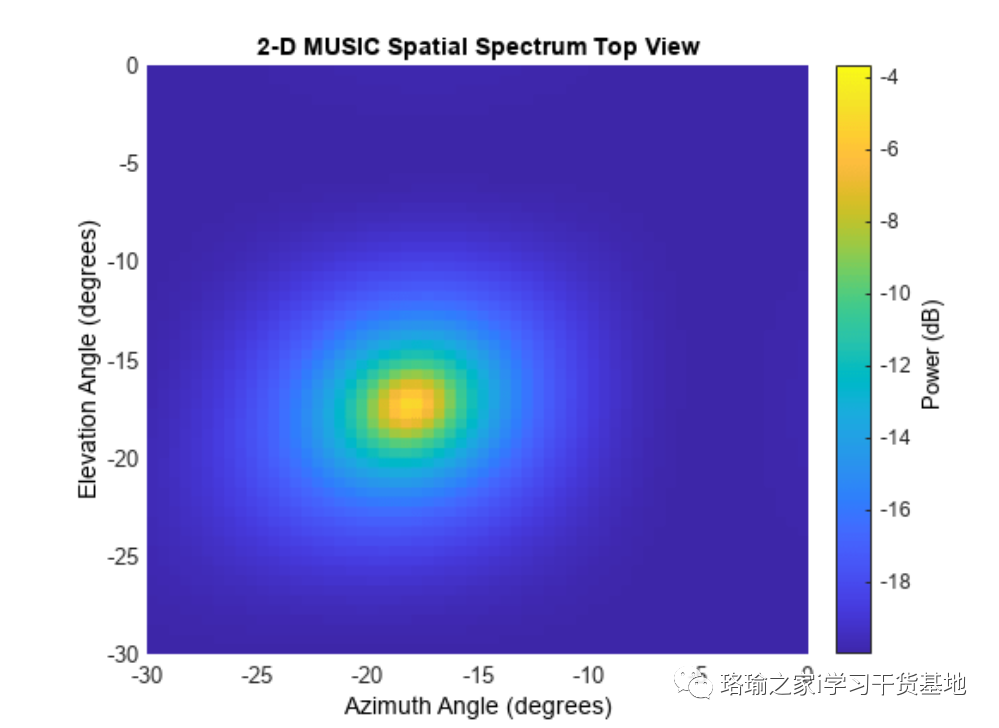
该图清楚地显示了发射器的位置。
应用波束转向后,天线在信号到达的方位角和仰角方面具有最大增益。这进一步提高了截获信号的信噪比。接下来,使用一种称为伪Wigner-Ville变换与Hough变换耦合的时频分析技术在信号处理器中提取信号参数,如[2]中所述。
首先,使用Wigner-Ville变换推导出截获信号的时间频率表示。
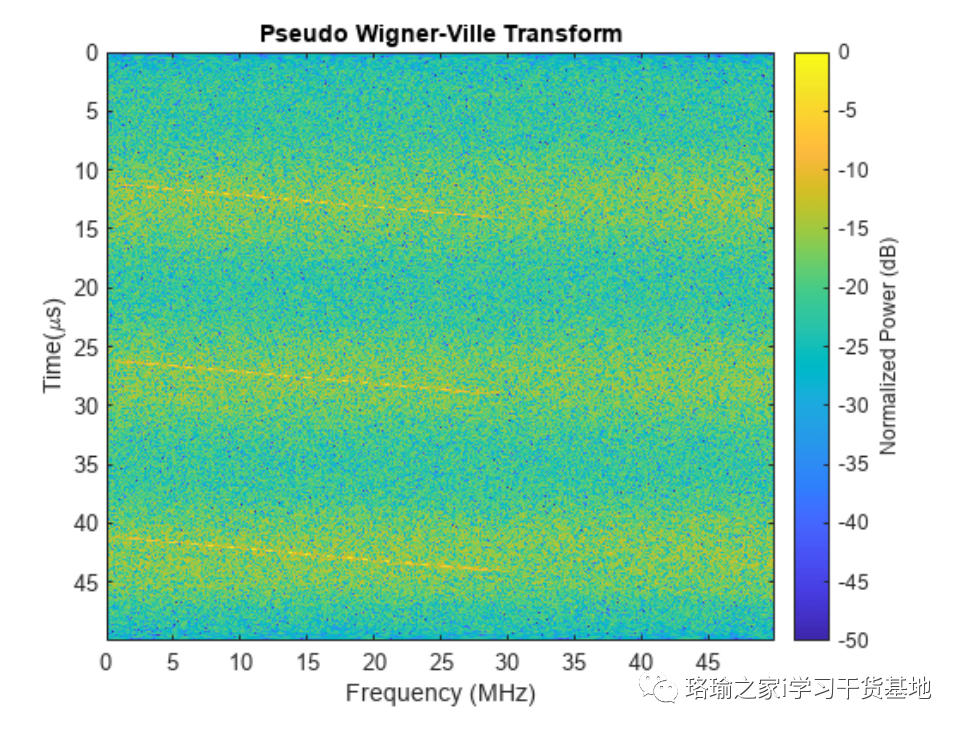
使用人眼,即使由此产生的时间频率表示是嘈杂的,将信号与背景分开并不难。每个脉冲在时间频率平面上显示为一条线。因此,使用时频线的开始和结束,您可以推导出脉冲宽度和脉冲带宽。同样,来自不同脉冲的线路之间的时间为您提供脉冲重复间隔。
要在不依赖人眼的情况下自动执行此操作,请使用 Hough 变换从图像中识别这些线条。Hough变换在存在噪声的情况下表现良好,该变换是对时频信号分析方法的增强。
要使用霍夫变换,必须将时频图像转换为二进制图像。下面对图像执行一些数据平滑,然后使用该函数进行转换。转换阈值可以根据接收器的信号噪声特性和工作环境进行修改。

使用霍夫变换,首先将二进制伪维格纳-维尔图像变换为峰值。这样,您只需要检测图像中的峰值,而不是检测图像中的线。
使用函数提取峰值位置。

使用这些位置,该函数可以重建原始二进制图像中的线条。然后如前所述,这些行的开头和结尾可帮助您估计波形参数。

下面列出了提取的波形特性。它们与事实非常吻合。然后,这些估计可用于对雷达进行编目,并在必要时准备对策。
五、总结
本示例展示了RWR如何使用信号处理和图像处理技术估计截获的雷达脉冲的参数。
六、参考文献
[1] Electronic Warfare and Radar Systems Engineering Handbook 2013, Naval Air Warfare Center Weapons Division, Point Mugu, California.
[2] Stevens, Daniel L., and Stephanie A. Schuckers. “Detection and Parameter Extraction of Low Probability of Intercept Radar Signals Using the Hough Transform.” Global Journal of Researches in Engineering, Jan. 2016, pp. 9–25. DOI.orgDOI.org (Crossref), https://doi.org/10.34257/GJREJVOL15IS6PG9.
七、程序
使用Matlab R2022b版本,点击打开。(版本过低,运行该程序可能会报错)
打开下面的“XXX.mlx”文件,点击运行,就可以看到上述效果。
程序下载:https://download.csdn.net/download/weixin_45770896/87666438