mid360激光雷达跑Point-LIO算法
news2026/2/11 22:54:52
本文来自互联网用户投稿,该文观点仅代表作者本人,不代表本站立场。本站仅提供信息存储空间服务,不拥有所有权,不承担相关法律责任。如若转载,请注明出处:http://www.coloradmin.cn/o/492783.html
如若内容造成侵权/违法违规/事实不符,请联系多彩编程网进行投诉反馈,一经查实,立即删除!相关文章

《花雕学AI》06:ChatGPT,一种新型的对话生成模型的机遇、挑战与评估
最近ChatGPT持续大火,大家们是不是在网上看到各种和ChatGPT有趣聊天的截图,奈何自己实力不够,被网络拒之门外,只能眼馋别人的东西。看别人在体验,看别人玩,肯定不如自己玩一把舒服的啊。
上一期࿰…

( “图“ 之 二分图 ) 785. 判断二分图 ——【Leetcode每日一题】
❓785. 判断二分图
难度:中等
存在一个 无向图 ,图中有 n 个节点。其中每个节点都有一个介于 0 到 n - 1 之间的唯一编号。给你一个二维数组 graph ,其中 graph[u] 是一个节点数组,由节点 u 的邻接节点组成。形式上,…

ios 在windows chrome 联调
必要条件
1、iOS设备、数据线
2、Node.js 环境
3、Chrome 浏览器
4、电脑登录iTunes
5、手机 Safari 浏览器环境准备
1、安装Node环境参考Node安装的教程,确保终端输入node时可正常使用
2、安装 scoope 以及相关配置为了安装后续需要用的工具 remotedebug-ios-web…
c# 数据保存为PDF(三) (PdfSharp篇)
PdfSharp 使用,创建PDF文档 前言关于 PdfSharp下载 PdfSharp使用PdfSharp常用命名空间和类1 创建一个简单的PDF文档2 创建一个带页脚的PDF文档2.1 创建临时数据表2.2 创建页脚2.3 完整代码 小结附录: 往期文章: 1、
c# 数据保存为PDF&#x…
java并发编程之美第四章读书笔记
第四章java并发包中原子操作类原理剖析
JUC包提供了一系列的原子类操作,这些类都是使用非阻塞算法CAS实现的,相比使用锁实现原子操作在性能上有很大提高
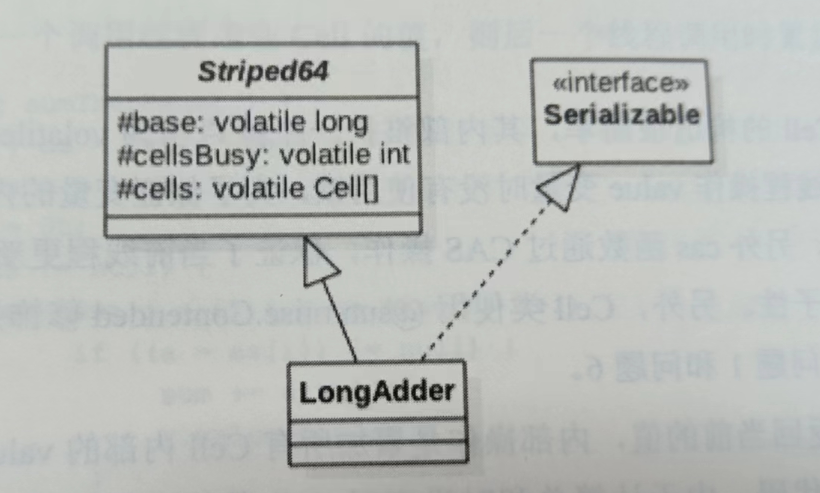
本章只讲解最简单的AtomicLong类的实现原理以及JDK8中新增的LongAdder和LongAccumulator类的原理
原子变量的操作类
At…

java并发编程之美第三章读书笔记
java并发包中ThreadLocalRandom类原理剖析
该ilei是JDK7在JUC包下面新增的随机数生成器吗,弥补了Random类在多线程下的缺陷
Random类及其局限性
public class RandomTest {public static void main(String[] args) {Random randomnew Random();for (int i0;i<10;i){Syste…

Facebook 用户量十分庞大,为什么还使用 MySQL 数据库?
Facebook是一个拥有超30亿用户的互联网公司,拥有海量数据,而且增长很快,单机数据库完全无法满足这种需求。
这时需要对数据进行分片,存储到多个数据库节点中,这个时候如果使用IOE作为其中一个节点,肯定可以…

MySQL Order by对各种排序算法的应用
通常我们实现的排序算法,都是在”纯内存“环境中进行。
MySQL 作为数据库难道是在先将所有要排序的数据加载到内存,再应用排序算法吗? 一、什么是内排序?什么是外排序? 内排序:全称为内部排序。内部排序是…
力扣题库刷题笔记647-回文子串
1、题目如下: 2、个人Python代码实现 思路如下: a、以切片的形式,判断每个子字符串是否为回文字符串。这里如何确定切片的起始下标就很重要了 b、首先需要知道的是字符串s,s[i,j],指的是从下标i开始,到下标…

算法DAY52 动态规划10 300.最长递增子序列 674. 最长连续递增序列 718. 最长重复子数组
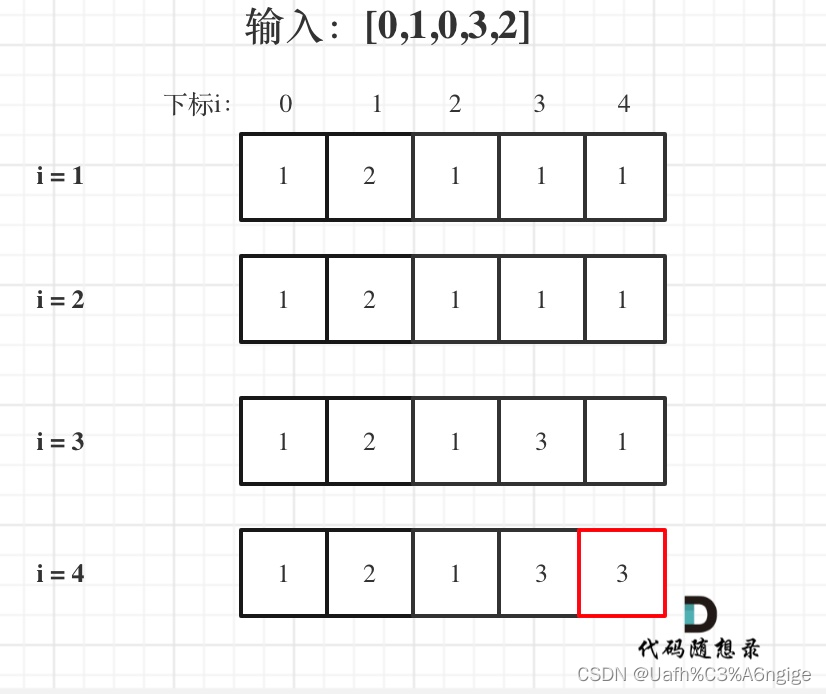
300.最长递增子序列
五部曲: 1、dp数组的含义: dp[ i ] : 代表 截至到nums[i] (包括 nums[i]) 的序列中,以nums[i] 结尾的,最长递增子序列的长度。这里强调以nums[i] 结尾,是因为还要跟nums[j]做对比,确定…

ACG-crcme1(★★★)
运行程序 info exit
查壳
没壳
载入OD分析
刚载入OD发现要使用 ACG.key
搜一下字符串看看 发现这有貌似成功相关的字符串 进去看看
可以找到关键跳 爆破的话直接在这就可以完成
上面就该是算法了
算法分析
开始先判断文件存在和文件内容大小
读取文件内容&am…
微前端 qiankun@2.10.5 源码分析(二)
微前端 qiankun2.10.5 源码分析(二)
我们继续上一节的内容。
loadApp 方法
找到 src/loader.ts 文件的第 244 行:
export async function loadApp<T extends ObjectType>(app: LoadableApp<T>,configuration: FrameworkConfi…
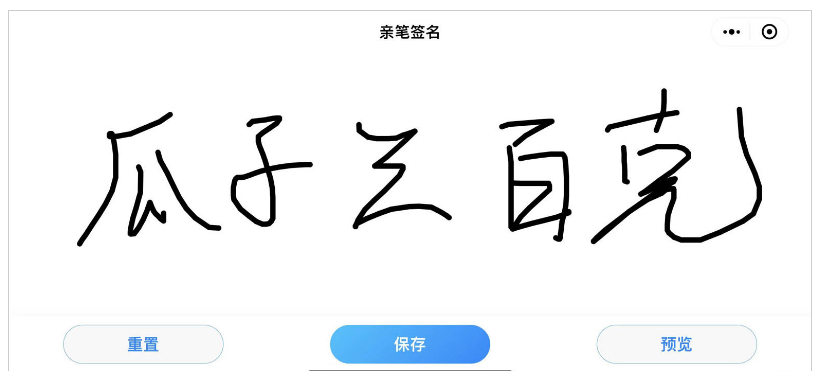
uniapp - 实现微信小程序电子签名板,横屏手写姓名签名专用写字画板(详细运行示例,一键复制开箱即用)
效果图
实现了在uniapp项目中,微信小程序平台流畅的写字签名板(也可以绘图)功能源码,复制粘贴,改改样式几分钟即可搞定!
支持自动横屏、持预览,真机运行测试非常流畅不卡顿。 基础模板
如下代码所示。
<template><view class=

vue3.2+vite+vant4+sass搭建笔记
1、确定node版本
1、下载nvm安装包
官方下载地址:https://github.com/coreybutler/nvm-windows/releases 双击安装 2、在node官网下载安装多个node
3、切换node 2、创建项目 1、安装依赖
pnpm i
2、启动项目
npm run dev 3、配置指向src
import { defineC…

FAST协议解析2 FIX Fast Tutorial翻译【PMap、copy操作符】
FIX Fast Tutorial
FIX Fast教程
(译注:本篇是对https://jettekfix.com/education/fix-fast-tutorial/翻译和解释,除了文本的直接翻译外,我还针对各点按我的理解进行了说明和验证,所以可以看到译文下会有很多译注&am…

虹科方案 | HK-Edgility:将 SASE 带到边缘
通过上期的文章,我们了解到虹科HK-Edgility软件系统《面向未来的安全SD-WAN》的解决方案。本篇文章,我们将带您了解虹科系统在SASE的方案简介。 一、时代背景 向软件即服务 (SaaS) 和云原生应用程序的过渡,加上越来越多的远程用户生成和访问公…

快来参与:2023全国大数据与计算智能挑战赛正在报名中
全国大数据与计算智能挑战赛是由国防科技大学系统工程学院大数据与决策实验室组织的年度赛事活动,旨在深入挖掘大数据应用实践中亟需破解的能力生成难题、选拔汇聚数据领域优势团队、促进大数据领域的技术创新和面向需求的成果生成、推动形成“集智众筹、联合攻关、…
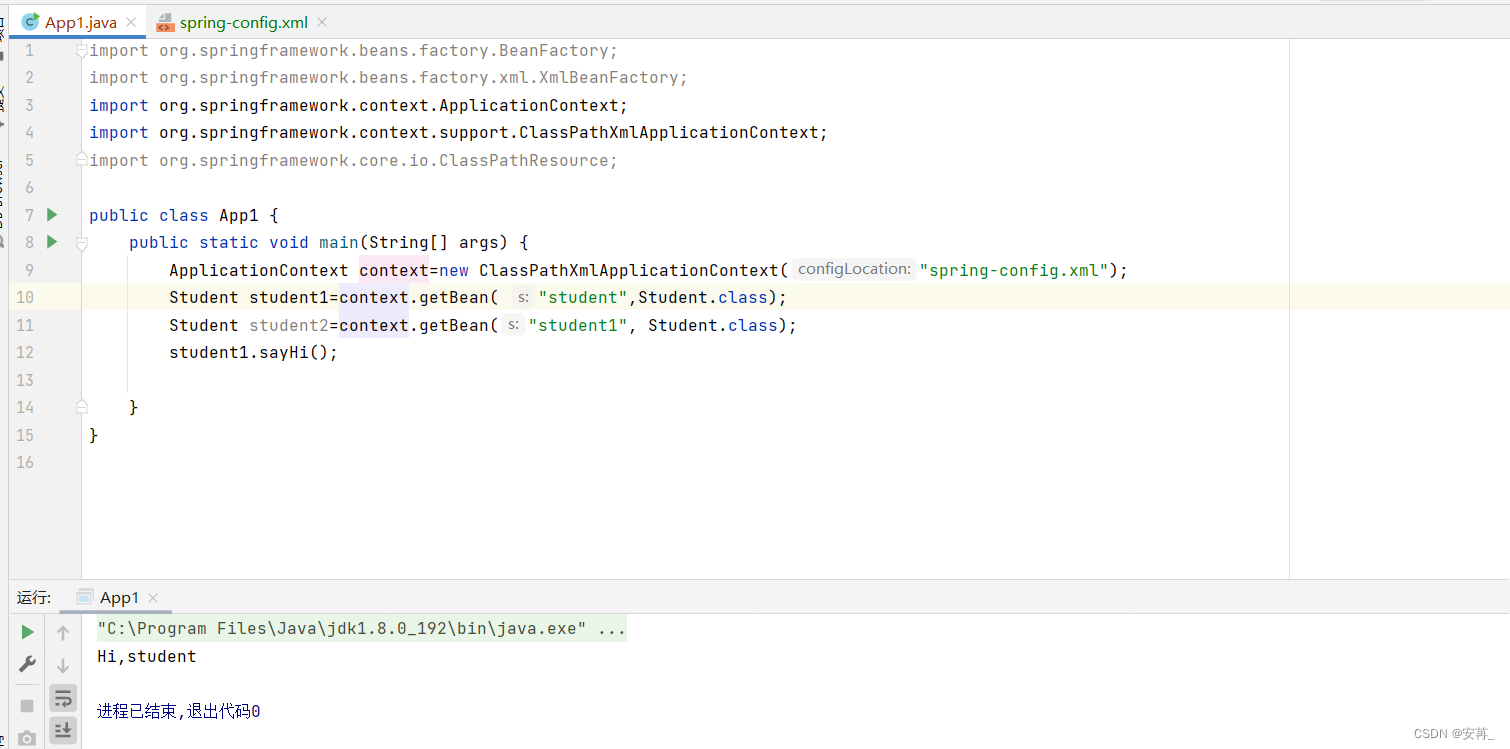
Spring项目的创建与使用
一、创建Spring项目
这里使用Maven方式创建Spring项目,分为以下三步:
创建一个普通的Maven项目添加spring框架支持添加启动类
注:这里创建的是一个spring的core项目,不是web项目,只需要main方法,不需要t…

Ubuntu显示美化 优化 常用插件
Ubuntu显示美化 优化 常用插件 1. 安装 Extension Manager2. 网速显示(不显示总流量记得关掉)3. 顶部透明度4. 左侧dock导航透明度5. 过渡动画2022-01-22 毛玻璃效果 和 程序启动背景墙效果2022-01-23 窗口预览(类windos多窗口)20…