天问一号(Tianwen-1)是中国第二个火星探测项目。2020年4月24日,中国行星探测任务被命名为“天问系列”,火星探测任务被命名为天问一号,后续行星探测任务依次编号。中国首次火星探测任务标识为“揽星九天”。

火星探测任务标识
天问一号由中国航天科技集团有限公司五院抓总研制,任务计划通过实施一次发射,实现多个工程目标,包括火星环绕和着陆巡视,开展火星全球性和综合性探测,并对火星表面重点地区进行精细巡视勘查。任务设定了五大科学目标,主要涉及空间环境、形貌特征、表层结构等研究。

天问一号首张公开照片
火星探测器被设计成环绕器和着巡组合体两部分。任务中,着巡组合体将在火星表面软着陆,并释放巡视器火星车,在火星表面进行探测;环绕器绕火星飞行,为任务提供中继通信服务,并伺机进行环绕探测。该任务共搭载13种有效载荷,其中环绕器7种、火星车6种。[3] 天问一号于2020年7月23日由长征五号运载火箭于海南文昌卫星发射中心成功发射升空。2021年4月24日,2021中国航天日开幕启动仪式在江苏南京举行。中国首辆火星车命名为“祝融号”。
项目背景
萤火一号
天问一号并不是中国首次发射火星探测器。
2011年11月8日,萤火一号搭乘在俄罗斯的火卫一-土壤号采样返回探测器上一起发射升空,开始对火星的探测研究。11月9日,俄方宣布福布斯-土壤号火星探测器变轨失败。[5]
立项过程
中国的深空探测规划,以火星探测为起点和主线,按照“一步实现绕着巡,二步完成取样回”的发展路线,突破深空探测基础和共性关键技术,实现跨越发展。
2016年1月,首次火星探测任务于得到国家批准立项,将通过一次发射任务实现火星环绕、着陆和巡视,对火星开展全球性、综合性的环绕探测,在火星表面开展区域巡视探测。任务计划于2020年发射,2021年实现中国的机器人登陆火星。
研制团队
天问一号火星探测器由中国空间技术研究院(航天五院)抓总研制。其中,着巡组合体为航天五院研制,环绕器为上海航天技术研究院(航天八院)研制。
工程目标
突破火星制动捕获、进入/下降/着陆(Entry Descent and Landing,EDL)、长期自主管理、远距离测控通信、火星表面巡视等关键技术,实现火星环绕探测和巡视探测,获取火星探测科学数据。通过这一任务的实施,建立独立自主的深空探测基础工程体系,掌握深空探测基础共性技术,形成开展深空探测的基础工程能力,推动中国深空探测活动可持续发展。
科学目标
通过环绕探测,开展火星全球性和综合性探测。通过巡视探测,开展火星表面重点地区高精度、高分辨的精细探测。具体科学目标包括以下5项内容:
- 研究火星形貌与地质构造特征。探测火星全球地形地貌特征,获取典型地区高精度形貌数据,开展火星地质构造成因和演化研究。
- 研究火星表面土壤特征与水冰分布。探测火星土壤种类、风化沉积特征和全球分布,搜寻水冰信息,开展火星土壤剖面分层结构研究。
- 研究火星表面物质组成。识别火星表面岩石类型,探查火星表面次生矿物,开展表面矿物组成分析。
- 研究火星大气电离层及表面气候与环境特征。探测火星空间环境及火星表面气温、气压、风场,开展火星电离层结构和表面天气季节性变化规律研究。
- 研究火星物理场与内部结构。探测火星磁场特性。开展火星早期地质演化历史及火星内部质量分布和重力场研究。
科学载荷
探测器由环绕器和着陆巡视器组成,总质量约5吨。
环绕器配置中分辨率相机、高分辨率相机、次表层探测雷达、火星矿物光谱探测仪、火星磁强计、火星离子与中性粒子分析仪、火星能量粒子分析仪共7台科学载荷,对火星开展全球性、普查性探测。

天问一号环绕器设计构型图
着陆巡视器由进入舱和火星车组成,进入舱完成火星进入、下降、着陆任务,火星车配置多光谱相机、次表层探测雷达、火星表面成分探测仪、火星表面磁场探测仪、火星气象测量仪、地形相机共6台科学载荷,在着陆区开展巡视探测。

天问一号着陆巡视器设计构型图

火星车工作示意图
环绕探测科学载荷
环绕探测是目前火星探测的主要方式之一,有利于获得火星全球性的探测资料,在火星研究过程中建立总体、全局的概念,因此是行星探测开始阶段的首选方式。中国首次火星环绕探测的主要科学任务包括以下5个方面:
1)火星大气电离层分析及行星际环境探测。
2)火星表面和地下水冰的探测。
3)火星土壤类型分布和结构探测。
4)火星地形地貌特征及其变化探测。
5)火星表面物质成分的调查和分析。
为了完成环绕探测科学任务,环绕器配置了中分辨率相机、高分辨率相机、环绕器次表层探测雷达、火星矿物光谱分析、火星磁强计、火星离子与中性粒子分析仪、火星能量粒子分析仪共7种有效载荷。

环绕器科学载荷(来自:行星事务所)
| 载荷名称 | 主要技术指标 |
|---|---|
| 中分辨率相机 | 成像谱段:可见光波段; 颜色:彩色(标准RGB) 地元分辨率:优于100 m@400 km; 成像幅宽:≥ 400 km@400 km; 有效像元数量:≥ 4 096 × 3 072 |
| 高分辨率相机 | 地元分辨率(265 km轨道高度): 全色:优于2.5 m,局部重点区域优于0.5 m; 彩色:优于10 m,局部重点区域优于2.0 m; 成像幅宽:≥ 9 km@265 km。 |
| 环绕器次表层探测雷达 | 工作频率:10~20 MHz,30~50 MHz; 发射机功率:≥ 100 W; 接收机灵敏度:≤ –87 dBm; 探测深度: 火星次表层结构约100 m(土壤,εr = 3.0~4.0); 火星极区冰层约1 000 m(冰,εr = 3.0); 厚度分辨能力:米级。 |
| 火星矿物光谱分析仪 | 光谱范围/μm: 可见近红外0.45~1.05,近中红外1.00~3.40; 光谱分辨率/nm: 可见近红外优于10;近中红外分两个光谱范围:优于 12 nm@1.0~2.0 μm、优于25 nm@2.0~3.4 μm。 |
| 火星磁强计 | 测量范围:±2 000 nT 噪声水平:≤ 0.01 nT/√Hz 分辨率:≤ 0.01 nT 精度:0.1 nT |
| 火星离子与中性粒子分析仪 | ①低能离子: 能量:5 eV~25 keV; 能量分辨率(ΔE/E):15%; 质量:1~70 amu; 质量分辨率(Δm/m):25%; 视场:90° × 360°; 角分辨率:11.2° × 22.5°; 时间分辨:8 s。 ②低能中性粒子: 能量:50 eV~3 keV; 能量分辨率(ΔE/E):100%; 质量:1~32 amu; 视场:15° × 160°; 角分辨率:10° × 25°; 时间分辨:4 s; |
| 火星能量粒子分析仪 | ①能量范围 电子:0.1~12 MeV; 质子:2~100 MeV; α粒子、重离子:25~300 MeV; ②能量分辨率(ΔE/E):15%; ③通量:0~105 cm–2s–1; ④元素成分:H~Fe(1 ≤ Z ≤ 26); ⑤重离子质量分辨率(Δm/m): ≤ 25%(Z ≤ 9,能量范围25~300 MeV); ≤ 25%(10 ≤ Z ≤ 26),能量范围100~300 MeV); ≤ 60%(10 ≤ Z ≤ 26),能量范围25~100 Me)。 ⑥视场:60°; ⑦时间分辨率:4 s(质子、电子、α粒子)、 60 s(重离子) |
环绕器次表层探测雷达
环绕器次表层探测雷达由中国电子科技集团公司第三十八研究所研制。

环绕器次表层探测雷达杂波分布图
环绕器次表层探测雷达,是将探地雷达搬移到行星环绕器上,实现对行星的表面和内部结构的岩性、电磁参数及主要组成成分的探测。
探测行星地面及表层之下的液态水或者固态水,是行星探测活动最有意义的一项工作。而低频段雷达具有穿透星球表面的能力,是实现行星探测的有效途径。行星环绕器次表层探测雷达能够实现环绕轨道行星次表层结构高分辨探测,获取行星表层和次表层雷达回波数据,为深入研究行星土壤层、沉积层和冰层等地质结构提供科学数据。
次表层探测雷达系统在行星环绕器上,工作的轨道高度为几百km,要实现对行星地质结构成像的目标,就需要实现电磁波最好的渗透。由于距离远,地表下物质电磁波衰减比较严重。一般来说,低频段的穿透能力比高频段的穿透能力强。因此,在环绕器平台条件限制(发射功率限制)情况下,采用较低工作频段来获得足够的穿透深度。在近10年间,火星探测雷达已经对火星的表面、次表面和电离层开展了广泛的探索。典型的火星次表层探测雷达包括欧洲空间局(European Space Agency,ESA)发射的火星快车(Mars Express)上搭载的火星次表层电离层先进探测雷达(Mars Advanced Radar forSubsurface and Ionosphere Sounding Radar,MARSIS)和搭载在美国国家航空航天局(National Aeronautics and Space Administration,NASA)发射的火星勘测轨道器(Mars Reconnaissance Orbiter,MRO)上的浅表层探测雷达(Shallow Subsurface Sounding Radar,SHARAD)。
高分辨率相机
高分辨率相机由中国科学院长春光学精密机械与物理研究所研制。

高分辨率相机光学系统
火星探测距离远,卫星平台资源有限,相机需要做到轻巧紧凑,根据探测任务对视场等指标的要求,火星高分辨率相机决定采用COOK TMA离轴三反光学系统完成设计,该型系统在离轴光学系统中摄远比大,体积重量小,其在后截距范围内具有实出瞳,可放置较小的平面镜用于系统调焦,该系统可实现的视场角适用于火星探测任务,满足任务需求。
相机的焦距4600 mm,相对孔径1:12,反射镜轴向距离750 mm,光学系统摄远比实现1:6。光学系统主镜与三镜为凹面离轴非球面反射镜,次镜为凸面离轴非球面反射镜。
光学系统焦面具有两个视场功能区,TDICCD推扫视场区域与CMOS面阵视频成像区域。TDICCD推扫视场区域光学传递函数设计值在全频处均接近衍射极限,优于0.4@60l p/mm(λ = 632.8 nm),CMOS面阵视频成像区域光学传递函数设计值平均值优于0.5@40l p/mm(λ = 632.8 nm)。经系统公差分析,由光学系统加工装调引起的光学传递函数下降因子可控制在0.9,光学系统静态传递函数可优于0.35。光学系统具有较小的畸变值,全视场内绝对网格畸变优于0.03%。
火星离子与中性粒子分析仪
火星离子与中性粒子分析仪由中国科学院国家空间科学中心研制。

离子与中性粒子分析仪原理图

火星离子与中性粒子分析仪鉴定件
历次火星探测计划中,低能离子是火星空间环境的重要探测目标,比如Phobos-2、Mars Express和MAVEN均开展了低能离子的探测,而对能量中性原子,目前为止只有Mars Express 开展了相关探测。Mars Express 是目前唯一一个既有低能离子又有能量中性原子探测的火星计划,通过2 种独立的载荷分别实现离子和能量中性原子的探测功能。火星离子与中性粒子分析仪将对火星空间的低能离子环境和能量中性原子(Energetic Neutral Atom,ENA)环境开展深入的探测,其科学目标为:
- 研究火星大气逃逸机制,估算火星大气和水的逃逸率,了解火星大气和水的演化历史;
- 研究激波附近中性粒子的加速机制,探索太阳风与火星相互作用机理。
火星离子与中性粒子分析仪的基本设计方案是:首先利用多层膜电离板将入射能量中性原子电离成带电离子,后端的能量和成分分析与低能离子探测共用带顶盖的半球形静电分析器以及基于碳膜飞行时间系统。
基于高集成化设计的火星离子与中性粒子分析仪总重量为4.3 kg,与国际同类仪器相比,重量节省了约1/3。
巡视探测器科学载荷
首次火星探测任务将同时对火星进行遥感探测和区域精细探测,两者互为补充,深化对火星的科学认识。其中,火星巡视探测主要完成以下4方面科学任务:
1)火星巡视区形貌和地质构造探测。
2)火星巡视区土壤结构(剖面)探测和水冰探查。
3)火星巡视区表面元素、矿物和岩石类型探。
4)火星巡视区大气物理特征与表面环境探测。
为了完成巡视探测科学任务,火星车配置了火星表面成分探测仪、多光谱相机、地形相机、火星车次表层探测雷达、火星表面磁场探测仪、火星气象测量仪共6种有效载荷。

巡视器科学载荷(来自:行星事务所)
| 载荷名称 | 主要技术指标 |
|---|---|
| 地形相机 | 成像谱段:可见光波段; 颜色:彩色(RGB); 正常成像距离:0.5 m~∞; 有效像元数量:2 048 × 2 048。 |
| 多光谱相机 | 成像谱段/nm,共9个谱段,分别为:480(20)、 525(20)、650(12)、700(15)、800(25)、 900(30)、950(50)、1 000(50);可直视太阳 全色谱段(括号内为半高全宽)。 颜色:多光谱 正常成像距离:1.5 m~∞; 有效像元数量:2 048 × 2 048。 |
| 火星车次表层探测雷达 | ①第一通道 中心频率:55 MHz;工作带宽:40 MHz; 对火星冰层穿透能力:米级; 探测深度: ≥ 100 m (冰,εr = 3.0); ≥ 10 m(土壤,εr = 3.0~4.0); ②第二通道 中心频率:1 300 MHz;工作带宽:1 000 MHz; 厚度分辨能力:厘米量级; 探测深度:≥ 10 m (冰,εr = 3.0); ≥ 3 m(土壤,εr = 3.0~4.0)。 |
| 火星表面成分探测仪 | ①LIBS探测 元素种类:不少于10种元素; 探测距离:2~5 m(最佳探测距离),最远10 m 显微图像分辨率: ≤ 100 μrad (0.20 mm@2 m,0.50 mm@5 m); ②短波红外光谱探测 光谱范围:850~2 400 nm; 光谱分辨率:≤ 12 nm; 波段数:不小于130波段 视场:≥ 1 mrad |
| 火星表面磁场探测仪 | 测量范围:± 2 000 nT; 噪声水平:≤ 0.01 nT/√Hz; 分辨率:≤ 0.01 nT; 磁强计稳定性:≤ 0.01 nT/℃; 采样率:1 Hz,16 Hz,32 Hz,128 Hz; 量程范围:±65 000 nT。 |
| 火星气象测量仪 | ①温度 测量范围:–120~50 ℃;分辨率:0.1 ℃; ②压力 测量范围:1~1 500 Pa;分辨率:0.1 Pa; ③风速 测量范围:0~70 m/s;分辨率:0.1 m/s; ④风向 测量范围:0~360°;分辨率:5°; ⑤声音 频率范围:20 Hz~2.5 kHz;2.5~20 kHz; 灵敏度:优于50 mV/Pa; 动态范围:≥ 90 dB。 |
火星表面成分探测仪
火星表面成分探测仪由中国科学院上海技术物理研究所研制。

火星物质成分分析仪
人类进行深空探测的终极目标就是寻找适于生命生存的环境。其中很重要一点是对星体的物质环境进行测定,所以对星体物质成分研究是深空探测的首要问题。
火星表面成分探测仪在进行物质成分检测时是基于激光诱导击穿光谱(Laser Induced BreakdownSpectroscopy,LIBS)技术的。LIBS技术是指通过向被测物体发射高功率密度的激光脉冲,在其表面烧蚀少量的等离子体,并探测后者冷却过程中的特征发射光谱以得到被测物体的元素成分组成信息的检测方法。
中国的火星车配置方案与国外不同,桅杆上放置了导航相机,激光诱导击穿光谱仪器安装在火星车舱板上正前方,并且由于该火星车没有采用核能供电,太阳能不足,以至于没有多余功率供给激光诱导击穿光谱仪器进行控温设计,因此,相比NASA的ChemCam而言,中国的激光诱导击穿光谱仪器所处温度环境更为恶劣,要适应火星夜–130℃的低温。
探测仪的舱外探头部分包括光学镜头、调焦机构、激光器头部及发射光学、显微成像探测器及其电路、分光耦合光纤光路和舱外热控等。舱外探头接收到主控电路发出的控制指令后启动调焦机构工作,主控电路同时控制激光发射和光谱采集。调焦功能采用同轴光路发射连续激光,通过寻找接收光信号峰值确定最小光斑。
舱内光谱仪部分包括激光驱动电路、LIBS光谱仪和舱内热控。舱内光谱仪根据主控电路发出的控制信号工作,激光发射时序由主控电路产生,光谱仪的数据采集启动由主控电路控制,采集到数据后传输到主控电路部分进行缓存并分析。光谱仪既要高分辨率,也要兼顾轻小和可靠,因此选择切尔–特尔纳(Czerny-Turner)光谱仪结构,以平面光栅作为色散元件,分辨率高、色散均匀。为保证在240~850 nm整个谱段范围内都能有高的光谱分辨率,将该谱段范围分成3段,紫外谱段240~340 nm光谱分辨率0.1 nm,可见光谱段340~540 nm光谱分辨率0.2 nm,近红外谱段540~850 nm光谱分辨率0.3 nm。LIBS光谱仪采用光纤输入接口,从探头部分引出光纤以收集LIBS信号。LIBS光谱仪则采用分色片将240~850 nm分成3个谱段,分别采集各谱段内的LIBS光谱。定标板安装在火星车结构板的尾部,可以实现在轨定标,定标板设计10种典型物质,在启动光谱采集任务前,通过指向定标板上的不同标定物,进行定量光谱采集,提高光谱定量分析的精度。主控电路部分主要进行外部通讯、接口控制、工作时序控制、数据缓存、数据压缩、以及光谱分析。主控电路安装在载荷控制器内部,根据载荷控制器给出的指令启动或者停止火星表面成分探测仪工作,并根据指令将采集到的光谱及其他相关数据发送到载荷控制器,经中继后发送回地面。光谱分析部分可以实现在轨的光谱合并累加,根据地面指令要求传输可以选择传输原始光谱数据、还是传输在轨处理后的光谱数据。
火星表面磁场探测仪
火星表面磁场探测仪由中国科学院地质与地球物理研究所研制。

磁强计双探头安装位置

火星表面磁场探测仪鉴定件实物图
磁场是描述火星的重要物理量之一。火星磁场测量为研究火星壳磁场空间分布、磁场起源及其时间演化、与地质构造的关系,以及太阳风与电离层的相互作用等方面提供了重要的观测数据。预期取得的研究成果对于认识火星内部结构、火星空间电磁环境,以及火星大气和气候的演化过程具有重要的科学意义。
火星表面磁场探测仪采用磁通门磁强计,具有小体积、低功耗、低噪声、高分辨率、高可靠性等优势。磁通门磁强计是一种测量微弱静态或低频交变磁场的矢量传感器,由三轴磁通门探头和电子学单元组成,其中探头部分是相互正交安装的3组磁通门线圈系统,主要包括激励线圈、感应线圈和反馈线圈。基本的工作流程是利用驱动电路向激励线圈加载一定频率f0(约9.6 kHz)的对称脉冲激励电流,在每个激励电流脉冲作用下,磁芯被饱和两次,感应线圈将磁信号转换为电信号。传感器输出的任意偶次谐波均可作为被测磁场的量度,由于二次谐波幅值最大,故通常选取其二次谐波电压量度被测磁场。
火星车磁强计在配置上包括两个磁强计探头(含线缆)和1块电子学单元,两个磁强计探头用来采集磁场信号,分别安装于桅杆顶端(探头1)和桅杆底部(探头2);电子学单元主要为磁强计探头提供激励信号,并对探头输出信号进行低噪声放大、处理和传输,电子学单元安装在巡视器内部载荷控制器中。为适应巡视器载荷产品应用需求,火星车磁通门 磁强计在保证探测精度的前提下,参照了Magson公司的硬件设计理念,采用全数字式电路方案替代传统的模拟电路方案,使得产品功耗降低至4 W以内,电路板(含外框)重量控制在610 g以内,实现了载荷产品的小型化、低功耗。
发射与轨道
发射窗口
天问一号于北京时间2020年7月23日12时41分发射升空,预计在2021年2月到达火星。
轨道设计
探测器与运载火箭分离后,经过中途修正,在近火点附近实施制动,实现火星捕获,进入周期约10个火星日的环火椭圆轨道,再择机实施轨道机动,进入周期约2个火星日的椭圆停泊轨道,完成着陆区预先探测和着陆点调整后,择机释放着陆巡视器。环绕器随即进行轨道调整,进入中继通信轨道。
着陆巡视器与环绕器分离后,进入火星大气,通过气动外形、降落伞、反推发动机等多级减速和着陆腿缓冲,软着陆于火星表面。火星车与承载平台分离,在火星表面开展巡视科学探测。
环绕器在中继通信轨道上为火星车提供中继通信链路,兼顾开展科学探测,运行90个火星日后,进行轨道调整,进入遥感使命轨道,开展科学探测,并兼顾火星车中继通信。
中途修正
北京时间2020年8月2日7时0分,天问一号探测器3000N发动机工作20秒钟,顺利完成第一次轨道中途修正,继续飞向火星。截至第一次轨道修正前,天问一号探测器已在太空中飞行约230个小时,距离地球约300万公里,各系统状态良好。本次3000N发动机点火,在完成轨道修正的同时,验证了发动机在轨的实际性能。后续,天问一号探测器还将经历深空机动和数次中途修正,奔火飞行6个多月后抵达火星附近,通过制动被火星引力捕获进入环火轨道,开展着陆火星的准备和科学探测等工作。
深空机动
2020年10月9日23时,在我国首次火星探测任务飞行控制团队控制下,天问一号探测器主发动机点火工作 480余秒,顺利完成深空机动,以使探测器能够与火星准确交会。
此次轨道机动在距离地球大约 2940 万千米的深空实施。探测器将在当前轨道飞行约4个月后与火星交会,期间将实施两到三次轨道中途修正。
近火捕获
2021年2月10日19时52分,中国首次火星探测任务天问一号探测器实施近火捕获制动,环绕器3000N轨控发动机点火工作约15分钟,探测器顺利进入近火点高度约400千米,周期约10个地球日,倾角约10º的大椭圆环火轨道,成为我国第一颗人造火星卫星,实现“绕、着、巡”第一步“绕”的目标,环绕火星获得成功。
远火点平面机动
22021年2月15日17时,首次火星探测任务天问一号探测器成功实施捕获轨道远火点平面机动。3000N发动机点火工作,将轨道调整为经过火星两极的环火轨道,并将近火点高度调整至约265千米。后续,探测器还将通过数次轨道调整,进入火星停泊轨道
进入停泊轨道
2月24日6时29分,我国首次火星探测任务“天问一号”探测器成功实施第三次近火制动,进入近火点280千米、远火点5.9万千米、周期2个火星日的火星停泊轨道。探测器将在停泊轨道上运行约3个月,环绕器7台载荷将全部开机,开始科学探测。
着陆
5月15日7时18分,天问一号探测器成功着陆于火星乌托邦平原南部预选着陆区,我国首次火星探测任务着陆火星取得成功。凌晨1时许,天问一号探测器在停泊轨道实施降轨,机动至火星进入轨道。4时许,着陆巡视器与环绕器分离,历经约3小时飞行后,进入火星大气,经过约9分钟的减速、悬停避障和缓冲,成功软着陆于预选着陆区。两器分离约30分钟后,环绕器进行升轨,返回停泊轨道,为着陆巡视器提供中继通信。后续,“祝融号”火星车将依次开展对着陆点全局成像、自检、驶离着陆平台并开展巡视探测。
测控系统
网络名称
CMARS-1
频率

测控站
测控系统基于现有航天测控网和深空测控网(包括北京航天飞行控制中心、佳木斯66 m口径天线测控站、喀什35 m口径天线测控站、阿根廷35 m口径天线测控站),并在喀什深空站补充建设3副35 m口径天线与已有天线组成天线阵系统,数据下行达等效66 m口径天线的能力(设计值),辅以甚长基线干涉测轨(VLBI)分系统和必要的国际联网,完成火星探测器状态监视、轨道测量、飞行控制、在轨管理和应急处置等任务。
地面应用系统在天津武清新建1副70 m口径天线,与已有地面数据接收天线进行组阵,达到等效80 m口径天线的数据接收能力(设计值),确保科学数据的可靠接收,并进行处理、解译,形成标准格式的数据产品,组织开展科学数据的应用和研究。
关键技术突破
火星环境不确定性分析及地面模拟验证
相对于地球和月球,人类对火星的研究还很肤浅,探测数据还很缺乏,基于已掌握的数据得出的结论与火星真实环境的符合性具有很大的不确定性,这也是以往火星探测成功率很低的根本原因。同时,中国没有火星环境的一手资料,只能通过广泛查阅国外已公开发表的文献资料获得相关数据,确定工程适用的环境参数项目,量化环境参数及其不确定度,研究模拟火星环境进行地面试验验证的方法。
轨道设计与总体指标优化
火星探测任务约束条件和设计状态复杂,运载能力、发射窗口、测控通信能力等总体指标与发射能量、近火制动能量、射向、航落区安全、中继轨道、任务轨道、着陆时机、有效载荷工作模式、科学探测数据量等关键因素密切耦合,是典型的非线性、多目标问题,5大系统密切配合,通过开展发射弹道与飞行轨道一体化设计、天地测控通信一体化设计、科学目标与有效载荷工作模式优化、可靠发射等专题研究,进行综合权衡与优化,保证各项总体指标协调匹配、总体最优。[6]
自主管理与控制
火星探测器飞行距离远,最远距离地球4亿km;飞行时间长,地火转移飞行约10个月,环火探测约2年;同时受地球、火星、探测器相对运动和地面站分布的影响,测控通信难以全空间覆盖;在环火探测中会经历2次日凌,通信中断最长达到30天;测控信号传输时延大,最短超过3 min,最长达23 min,特别是执行近火捕获、两器分离等决定任务成败且只有一次机会的轨道控制时,探测器距离地球约3亿km,信号时延15 min以上,由地面进行实时测控干预的条件已不存在,探测器必须自主执行预先注入的指令,并自行判断指令执行的效果,一旦发现问题,必须在极短时间内根据自测量信息,进行自诊断,并完成故障的自恢复,对探测器自主导航、管理与控制的能力提出了更高要求。为此,开展了火星安全捕获制动控制,两器分离与安全升轨控制、长期自主管理和控制策略与方法等专题研究和验证,提升探测器的自主能力。
火星进入气动外形与防热
火星大气的成分、密度、分布等与地球截然不同,而通过国外有限的探测得到的相关数据样本又十分不充分,有关模型具有很大的不确定性。火星大气进入过程的气动力、气动热问题对气动外形、结构、防热等设计十分关键,而我们的相应工程研究基础几乎为零。为此,进行了大量的风洞试验,从积累基础数据开始,开展着陆巡视器气动外形设计与优化、火星大气进入气动力和热特性预测算法研究、建立着陆巡视器气动力和热标称数据,并开展气动数据偏差分析等研究,以此为基础进行着陆舱气动外形结构和热防护设计。
火星降落伞
火星具有稀薄大气,着陆需要用降落伞减速,但火星的大气密度极低,并且需要在超音速条件下开伞,降落伞设计的约束条件与地球返回式卫星和载人航天工程采用的降落伞截然不同。火星降落伞从伞型、材料、包伞、弹伞、开伞等选择,到与之相关的关键指标、参数确定,再到验证方法等一系列设计要素,均要全新设计和验证。为此,开展了降落伞特纺材料、降落伞的关键结构参数、加工和高密度包装工艺、弹射药剂的燃气控制和能量释放过程、弹伞筒低冲击结构设计等分析和攻关,进行了火箭弹高空开伞试验等大量验证试验,设计了适合火星大气环境的降落伞。
火星软着陆及巡视的导航、制导与控制
探测器软着陆火星的进入、下降、着陆过程分为气动减速、伞系减速、动力减速、着陆缓冲4个阶段,在进入火星大气到着陆到火星表面的短短数分钟之内,着陆舱要执行升力控制、弹伞开伞、抛大底、抛背罩、悬停、避障和着陆缓冲等一系列控制动作。这一过程,地面无法实时干预,着陆舱需要根据预先注入的指令,自主进行导航、制导与控制。由于对火星环境缺乏了解,EDL过程面临的环境存在较大的不确定性,相比月球着陆,一是在进入火星大气初期,着陆舱的初始状态(轨道、姿态)存在一定的不确定性;二是在下降和着陆过程中,存在风和沙尘的干扰;三是由于缺乏着陆点地形细节的高分辨率图像,着陆敏感器的测量结果存在很大的不确定性。诸多的不确定性因素耦合交织,为这一过程的导航、制导和控制带来了更大的困难。
火星车巡视探测,由于信号时延大,且受中继通信时段的限制,依赖地面指令控制的方式效率极低,已经不具备可操作性,巡视的自主导航、制导与控制成为实现探测的前提,特别是对障碍的自主识别和路径的自主规划提出了更高的要求。为此,开展了火星EDL过程导航、进入升力制导与控制、动力减速制导与控制、火星着陆障碍物自主识别与火星车自主路径规划等关键技术攻关,解决着陆和巡视的导航、制导与控制难题。
火星车长期生存和移动
火星距离太阳远且受大气的影响,辐照强度约为月球表面的20%,沙尘天气将进一步降低辐照,导致火星车的发电功率很低。此外,由于火星尘的影响,太阳电池发电量每日衰减,根据美国“勇气号”(Spirit)的实测数据,日衰减率为0.1%~0.3%。这些因素都给火星车的能源供给带来极大的挑战。与此同时,火星的平均气温在–60 ℃左右,最低可达–125 ℃,且由于存在大气,对流散热对火星车保持温度带来了更为严重的影响。能源获取不足而环境温度较低的矛盾十分突出,为此,火星光谱匹配太阳电池、太阳电池防尘设计、火星大气环境隔热技术、直接利用太阳能供热集热器等攻关,解决能源问题。火星车的移动也面临许多不确知的环境,一是移动能力和火星表面构造的力学特性直接相关,而我们对这些特性知之甚少;二是火星表面石块等障碍分布密集,火星车以自主行驶为主,被石块卡滞的风险更大;三是火星表面温度交变频繁,存在沙尘天气,更容易发生车轮卡死失效;四是火星表面多石块环境对车轮轮缘的强度、耐磨性提出更高要求。为此,针对表面构造的力学特性,开展了移动动力学与力学仿真、火星土壤力学与车轮优化、火星复杂环境地面试验验证等技术攻关;针对火星车更强的遇险脱困要求,开展了主动悬架技术攻关,实现了车体升降、抬轮、蠕动等功能;针对车轮,开展了高韧性、耐磨性的一体化结构轮缘设计,同时为缓解火星车越障等引起的冲击,设计了具有减振功能的弹性轮辐。
行星际测控通信
地球与火星之间距离遥远,相比月球探测,无线电信号衰减可达60 dB,信号传输单向延迟长,导致地面接收信号信噪比谱密度极低,轨道测量误差要放大约1 000倍,探测器与地面测控数传链路紧张、有效数据传输困难、传输实时性差。针对这些特殊情况,相关系统协同开展了多基线高精度相位参考干涉测量、精密定轨与预报、基于MFSK体制的火星探测EDL段测控、远距离高动态低码速率信号捕获与跟踪、X频段数字深空应答机、UHF/X频段器间中继通信、天线阵异地组网接收等技术攻关,通过提高探测器和地面测控通信设施两方面的能力,共同解决行星际测控通信问题。
科研成果
遥感图像
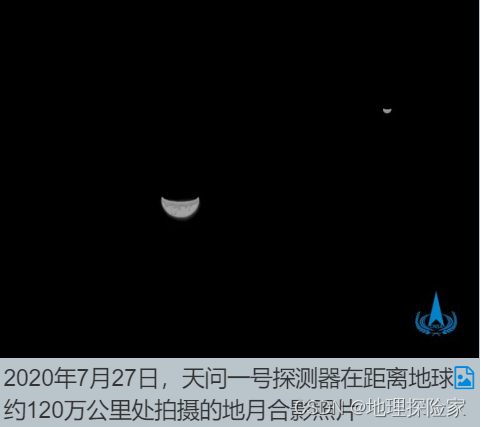
2020年7月27日,天问一号探测器在距离地球约120万公里处拍摄的地月合影照片
2020年7月27日,天问一号探测器在飞离地球约120万公里处回望地球,利用光学导航敏感器对地球、月球成像,获取了清晰地月合影。在这幅黑白合影图像中,地球与月球一大一小,均呈新月状,在茫茫宇宙中交相辉映。