摘要:
跨模态行人重识别技术(cm-ReID)旨在可见光、红外等不同模态图像中识别出同一个人,其在人 机协同、万物互联、跨界融合、万物智能的智能系统与装备中有重要应用。提出一种数据增强的跨模态行人 重识别方法,在波长域进行数据增强的同时保留可见图像的结构信息,以弥合不同模态之间的差距。在此基 础上,基于瑞芯微的 RK3588 芯片设计实现了一套边缘智能终端,并部署了跨模态行人重识别算法。
0 引言
行人重识别(Re-ID),广泛用于视频监控,安
全和智慧城市等各种应用中,旨在解决在不同位置
部署的多个不重叠摄像机中检索感兴趣的行人问题,
由于其在智能视频监控中的重要性,已经引起了计
算机视觉界的越来越多的关注
[1-3]
。当前大量的行人
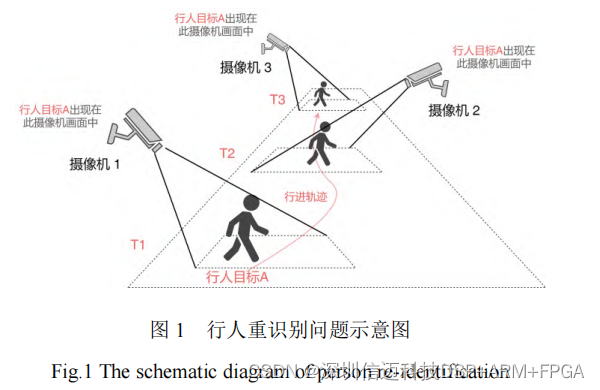
重识别模型都着眼于可见光-可见光行人图像匹配,
最常见的单模态行人重识别任务,如图1所示,给定
一个探测到的行人图像,并将其与其他不重叠的摄
像机捕获的一组图像进行匹配,该组图库包含所有
可见摄像机数据。由于照明,相机型号差异,视角
变化和姿势变化,前景行人图像可能会变化很大。
尽管存在这些挑战,但随着深度神经网络的发展以
及行人重识别研究的持续推进,在单一可见模态下,
可见光-可见光行人重识别取得了很大的进步并获
得了很高的精度
[4-6]。不过,由于可见光行人重识别
在某些不良的光照条件下,比如在黑夜中无法给出
相应的判别信号。所以如果只通过可见光摄像机,而
没有额外的人工光源,应用将受到限制,因为该系统
在每天的一半时段内都无法正常工作,这就极大地
影响了行人重识别的实际应用。
在实际情况下,如果使用24
h
智能监控系统,可
以在白天通过可见摄像机获取探测图像,而在夜间
通过热像仪捕获图像,图像来自不同的模态。对于实
际应用,现代监视系统通常以双模态运行,即白天
在可见模态下工作,而在夜间自动切换为红外模态。
给定行人的红外图像,目标是匹配相应行人的可见
图像。此跨模态图像匹配任务称为可见光红外行人
重识。与具有丰富色彩信息和结构图案的可见光图
像相比,红外图像是在红外光谱下捕获的,由于可
见光谱的反射率和热光谱的发射率之间存在自然差
异,从而导致外观完全不同,失去了鲜明的颜色特
征。模态差异使得在可见光光谱和红外光谱之间识
别同一个人变得更加困难。这个新问题是一个交叉
模态问题,近年来只有少数相关的前沿工作
[7-9]
。
为推动跨模态行人重识别技术在智能系统与装
备中的实际应用,参考边缘智能终端
[10-15]
的部署应
用,本文提出了一种高效的跨模态波长增强的行人
重识别方法,在波长域进行数据增强的同时保留可
见图像的结构信息,以弥合不同模态之间的差距。同
时,本文基于国产化RK3588芯片设计了边缘智能终
端,部署了跨模态行人重识别算法,并设计实现了
人工智能综合视频监控软件。实践表明,本文提出的
方法在两个基准数据集SYSU-MM01
[16]
和RegDB
[17]
上取
得了较好的性能,并能够在实际场景中进行应用部
署。
1
跨模态行人重识别方法
1.1
红外可见光跨模态行人重识别数据集
为了研究可见光红外跨模态行人重识别问题,
需要收集同一行人对应的可见光图像和红外图像,
如图2所示。文献[16]提出了SYSU-MM01数据集,其
中包括了由4个可见光摄像机以及2台在室内和户外
拍摄的近红外摄像机所拍摄的影像,其中的可见光
图像由Kinect V1在明亮的室内房间拍摄,红外图像
是由近红外相机在黑暗条件下拍摄的。

在文献[17]的工作中,提出了一个新的称为
RegDB的可见光热红外数据集,该数据集利用文献
[16]中的原始数据并设计了类似于SYSU-MM01数据
集的架构。RegDB
[17]
数据集中,可见光摄像机拍摄的
图像分辨率为800×600像素,红外摄像机拍摄的图
像分辨率为640×480像素,总共采集了412名行人的
8 240张图片(包含4 120张可见光图像和4 120张对
应的红外图像)。主要区别在于,SYSUMM01包含可
见光和近红外图像,而RegDB包含可见光和远红外图
像,这使得一些方法在两个数据集中都难以工作。
由于波长较短,来自SYSU-MM01数据集的近红外图像
具有清晰的边缘和清晰的背景。作为比较,RegDB数
据集中的远红外图像边缘模糊,丢失了许多彩色图
案。
1.2
红外可见光跨模态行人重识别方法
较大的跨模态差异是红外可见光跨模态行人重
识别的最大问题,这是由可见光和热像仪的不同反
射可见光谱和感测到的发射率引起的。可见光图像
具有3个通道,其中包含波长范围为
400~700 nm
的可
见光的颜色信息,包含足够的人的肤色信息,而热图
像具有一个包含不可见光信息的通道,其波长比可
见光的波长更长。因此,这两种方式本质上是不同
的,导致可见光行人重识别中行人的最重要的颜色
信息特征,很难用于红外可见光跨模态行人重识别
的异构数据。当将这两种模态的图像直接进行联合
跨模态学习时,大多数现有的红外可见光跨模态行
人重识别方法变得对参数敏感,难以收敛且计算量
大。


目前的红外可见光跨模态行人重识别方法大多
将输入图像转换为相同或不同的模态图像,或由
GAN
生成相似的图像,受到以下限制:
1)
将可见光图像、灰度图像、红外图像同步输
入网络,但忽略它们对波长的依赖性会丢失波长之
间相关性的大量信息,这将影响最终性能,例如图
3
(a)所示。
2)
不同层次特征之间的不同感受野可能会降低
直接特征融合的效果,因为结果感受野减少。
3)
来自不同模态的图像很少,仅在
3
个
RGB
通
道中保持可见光图像的颜色或简单地将可见图像转
换为灰度图像就限制了跨模态行人重识别的数据增
强,例如图
3
(b)、图
3
(c)所示。
本文提出了一种颜色抖动增强方法,用于数据
增强模型中不同波长之间的关系,如图
3
(d)所示。
在文献
[18]
中提出的基于同质增强的三元跨模态行
人重识别学习方法的基础上,在基于亮度、对比度、

道到增强模态的映射,具体操作中在
torchvision
中
使用
torchvision.transforms.ColorJitter()
函数来实现
亮度、对比度、饱和度和色调空间的随机调整。与
现有的数据增强方法不同
[18]
,颜色抖动增加了每个
波长的多样性,从而为整个输入产生了更多不同强
度波长的信息组合。有了这种颜色抖动,生成的图
像将在不同波长上有效地增加互补信息,而不需要
额外的注释数据。然后将红外、可见、增强模态这
3
种图像经过一个参数共享的单流网络来学习不同图
像输入之间的关系,并根据这种关系从不同的模态
中搜索物体。
2 边缘智能终端部署
2.1 硬件实现
与目标检测、目标跟踪等一般视觉人工智能任
务可采用单一计算机后端不同,跨模态行人重识别
技术是跨摄像机多视角的视觉人工智能任务,涉及
到多路视频流信号的联合分析,在前端设备数量较
多的情况下,单一处理后端难以满足实际的
AI
推理
高计算量需求,限制了整体应用系统的扩展性。
为了验证及演示本文提出的跨模态行人重识别
技术的先进性及实用性,本文单独设计了一套边缘
计算系统实现,如图 4 所示。边缘计算系统以板卡
的形式将跨模态行人重识别神经网络推理单元集成
到每路摄像设备前端。实际工作时,可见光、红外
模态视频流数据经过边缘计算系统实时处理分析后,
将图像与人工智能推理结果一同回传给后端,降低
了数据集中处理的计算压力,且系统弹性可扩展,
不受接入前端设备的数量影响,更符合跨模态行人
重识别任务的实际应用场景需求。

如图
5
所示,边缘计算系统硬件方案以国产瑞
芯微
RK3588
处理器为处理核心,该处理器采用四
核
ARM Cortex-A76+
四核
Cortex-A55
处理单元,搭
配
16G
板载内存,系统整体具有高性能、低功耗的
特点,典型功耗
10 W
。内置
NPU
(神经网络处理单
元),支持
INT4/INT8/INT16/FP16
混合计算,含
3
个
NPU
独立核心,可联合计算亦可单独工作,浮点
计 算 运 算 能 力 高 达
6TOP
。具备
H.264/H.265/VP9/AVS2
等格式的专用编解码硬件模
块,支持高达
8k
分辨率视频流的实时编解码。系统
支持
2
路千兆以太网接口。同时针对多模态视频监
控的特定任务场景,本文方案扩展搭配
ADV7281A
模拟视频解码芯片,提供四路模拟视频接口,兼容
NTSC/PAL/SECAM
多制式模拟视频,形成了完整的
模拟
/
数字视频流的兼容支持能力。提供
5
组
485
接
口,可以对转台、云台等设备进行串口控制。


图
5
基于
RK3588
处理器的边缘智能终端实物图(左为终
端正面,右为终端反面)
2.2
软件环境
边缘计算部署软件环境由
PC
端开发转换环境
与边缘段部署运行环境两部分组成。
PC
端开发转换环境为瑞芯微提供的
RKNN
Toolkit2
工具链,其包含一组兼容
Caffe
、
TensorFlow
、
ONNX
、
PyTorch
等人工智能框架,进行神经网络模
型调整、优化、转换的基础软件工具及多语言编程
接口,用于将训练完成的人工智能网络模型转换输
出为
RKNN
专用格式。如图 6 所示,边缘端部署运
行环境具体包含:
1)
视频流取流模块,用于读取可见光或红外热
成像摄像机视频流,支持
RTSP/RTMP
等网络流格
式的网络摄像机或者
MIPI/USB
接口的数字摄像头
设备。
2)
人工智能神经网络推理核心单元,其为瑞芯
微官方提供的
RKNPU2
基础
NPU
推理环境,其作
用为将
PC
端处理转换后的
RKNN
格式的神经网络
模型部署在芯片专属
NPU
单元中,同时接收取流模
块获取的可见光或者红外视频流进行神经网络推理,
并向后输出推理结果。
3)
流媒体服务器模块,用于将通过人工智能神
经网络处理后的的可见光或红外视频流进行二次推
流输出到后端。针对显控终端软件不同显控需求,
本方案提供
3
种视频流输出方式:针对调试、非
AI
显示功能,提供原始视频流转发透传模式;针对一
般性非交互
AI
推理显示功能,提供叠加显示模式,
即
AI
推理结果与原始视频图像叠加后输出给后端;
针对客户端需要对
AI
推理结果进一步加工的功能,
提供
AI
推理结果单独输出模式。
4)
设备串口控制模块,用于向摄像机前端发送
串口控制命令,控制其转动,扫描等功能动作;
5)Web
服务模块,用于向后端提供直观、易用
的基于
Web
界面的设置接口,同时可实时向后端报
告边缘计算系统运行状态,包括板载各项硬件状态、
软件功能模块、通信状态等部分的实时监测信息,
易于显控终端程序对板载各个系统进行监测,并对
板载资源进行相应的规划与调整。同时提供
GUI
接
口,配置看门狗、上电重连、断线重连、灾难恢复
等功能辅助功能,最大化板载功能的易用性。

该设计方案通过引入层级配置文件的配置方案,
提供系统状态版本切换功能,即可根据具体应用场
景需求,通过上传系统功能配置文件的形式,一键
切换系统工作状态,或者通过提供不同版本的系统
配置文件,针对具体情境进行工作状态动态切换,
便于系统调试或者提供基于场景的工作模式切换功
能。

图 7 边缘智能终端软件依赖关系图
如图 7 所示,该设计通过将系统抽象成相互独
立的功能模块,相互之间通过接口结合配置信息进
行组合形成具体功能的形式,最大化的保持了系统
的扩展性,以适应不断变化的应用需求。同时,模
块化的设计支持对每个独立功能部分进行迭代升级,
或者引入新的功能模块,为系统提供最大化向后扩
展可能性保障。通过
WEB
向用户提供直观、易用的
用户交互接口,系统所有功能设置,参数设置,系
统状态等均可通过该用户接口进行统一设定,最小
化系统使用难度。
3
实验与结果分析
3.1
模型训练与部署
如图 8 所示,模型训练分为以下
4
个步骤:
步骤 1
数据准备及格式转换。将 SYSUMM01、
RegDB多摄像机可见光、红外热成像图像数据混合、
清洗、均衡化后统一转换为
PASVCAL
格式数据文
件。
步骤 2 将预处理的多模态数据进行增强,即在

基于亮度、对比度、饱和度和色调空间的抖动,从
可见图像生成增强模态,在波长域进行数据增强的
同时保留可见图像的结构信息。
步骤 3
根据数据集多模态成分具体构成,决定
模型每个训练周期训练数据分割策略、模型学习率
调整关系等策略参数,构建输出训练模型策略配置
文件。
步骤 4
执行模型训练程序,训练结束后生
成
.pth
格式神经网络模型。
将训练生成的
.pth
神经网络模型权重文件转换
成为瑞芯微专属
RKNN
格式,须先将其转换为
ONNX
格式。
ONNX
(
Open Neural Network Exchange
)
是一种针对机器学习所设计的开放式的文件格式,
用于存储训练好的模型。它使得不同的人工智能框
架(如
Pytorch, MXNet
)可以采用相同格式存储模
型数据并交互。通过调用
torch.onnx
模块将神经网
络模型权重文件转换为
.ONNX
神经网络交换文件。
下面通过调用
RKNN Toolkit2
工具将
.ONNX
文
件转换为瑞芯微专属
RKNN
专属神经网络权重文件
并存储于边缘计算板的预定目录。利用
RK3588
部
署时,实际采集的可见光和红外图像分辨率不一致,
可见光图像分辨率为
1 920
×
1 080
,红外图像分辨
率为
640
×
512
。实际部署中,将可见光图像降采样
为
640
×
512 作为模型的输入,对不同分辨率的图像

调整为一致的分辨率进行处理。通过与边缘计算版
取流与流媒体服务器模块结合,可完成可见光
/
红外
图像实时读取分析回传后端的完整边缘计算功能。
3.2
实验结果分析
将本文提出的方法与 HCML
[19]
、Zero-Pad
[16]
、
HSME
[20]
、D2RL
[21]
、MAC
[22]
、MSR
[23]
、HAT
[18]
在两个基准
数据集 SYSU-MM01
[16]
和 RegDB
[17]
上进行了实验和比
较。其中在 SYSU-MM01 数据集上的运行结果如表 1
所示,在 RegDB 数据集上的运行结果如表 2 所示。
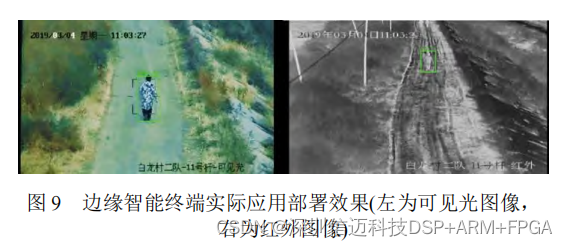
同时,将本文设计的边缘智能终端部署于昼夜
安防监控的实际应用场景中,运行效果如图
9
所示,
左侧为可见光图像,右侧为跨模态行人重识别算法
匹配的红外图像。
4
结论
本文研究了红外可见光跨模态行人重识别方法
及基于边缘智能终端的部署。得出主要结论如下:
1)
提出了一种高效的跨模态波长增强的行人重
识别方法,以弥合不同模态之间的差距。该方法在
两个基准数据集
SYSU-MM01
和
RegDB
上取得了
较好的性能
2)
在实践中,基于国产化
RK3588
芯片设计了
边缘智能终端,并部署了跨模态行人重识别算法。
实践表明,能够在昼夜安防监控场景中进行应用部
署。
关于未来的研究方向,可以从如下角度考虑:
1)
构建更高质量的红外可见光数据集:目前基
于红外和可见光的数据集相当匮乏,构建高质量的
数据集有助于以深度学习网络为代表的方法的模型
优化。
2)
利用多模态和传感器信息:结合多种传感器
的空间姿态、性能等参数信息,可以利用更多的先
验信息提升性能。
信迈提供RK3588视觉方案。






![[Dubbo] 重要接口与类](https://img-blog.csdnimg.cn/21c1dde285854163a96ca36d42a0ce2a.png)