前言
- ★:重点
- ※:补充内容
- ❓:还没搞懂的
- 内容主要来源:教材、PPT、百度百科、AI
- 重点来源:4-6班
- 感谢:lyf
- 总结得很草率,因为没听过课,也玩不懂
重点汇总
- 考试题型
- 选择(40 分)
- 简答(20 分)
- 程序题(20 分)
- 内容包括代码说明、实现部分功能等
- 考查方式如代码填空、写注释、回答执行效果
- 问答题(20 分)
- 主要知识点
- 第 1 章:
1. 嵌入式系统概念、应用与特点
2. 嵌入式系统的硬件(CPU、外设)
3. 主要嵌入式软件系统(应用及 OS)
4. 嵌入式系统的发展趋势 - 第 2 章:
1. ARM 处理器特点及应用
2. CM3 微控制器简介
3. CM3 存储格式类型
4. CM3 嵌套向量中断控制器 NVIC
5. CM3 寄存器组织
6. CM3 存储映射(位带及计算)
7. CM3 异常与中断
8. STM32 时钟源与时钟树
9. STM32F10 系列的 GPIO - 第 3 章:
1. 嵌入式开发环境(交叉编译、开发、调试工具) - 第 4 章:
- GPIO 实验(流水灯程序,八段数码管显示程序)
- 按键原理、中断过程与中断程序设计(键盘扫描程序)
- 串口通信原理与程序设计(接收数据处理)
- 模数转换原理与程序设计
- 定时器与看门狗原理与程序设计
- 第 5 章:
1. 嵌入式操作系统概念、特点及应用
2. 任务状态机 - 复习要点
- 阅读教材,突出重点
- 分析代码,尤其初始化部分,动作部分,理解程序。
- 了解嵌入式处理器的选型原则(根据需求,性能,成本,开发工具,已有资源)
- 了解嵌入式系统的发展趋势
- 了解嵌入式系统发展的挑战与机遇
第 1 章
嵌入式系统
概念
以应用为中心、以计算机技术为基础、软件硬件可裁剪、适应应用系统对功能、可靠性、成本、体积、功耗严格要求的专用计算机系统。
应用
- 国防军事
- 工业控制
- 交通管理
- 信息家电
- 办公自动化
- POS网络及电子商务领域
- 医疗保健设备
- 环境工程与自然
- 机器人
- 移动终端设备
特点
-
以应用为中心
-
以计算机技术为基础
计算机系统由软件和硬件构成
-
专用于特定任务
-
多类型处理器和处理器系统支持
-
通常极其关注(系统)成本
-
一般是实时系统
-
可裁剪性好
-
可靠性高
-
大多有功耗约束
嵌入式处理器内核的分类
按指令/体系结构分类
- CISC
- RISC
按存储机制分类
- 冯·诺依曼结构
- 哈佛结构
按字长分类
- 8位
- 16位
- 32位
- 64位
组成
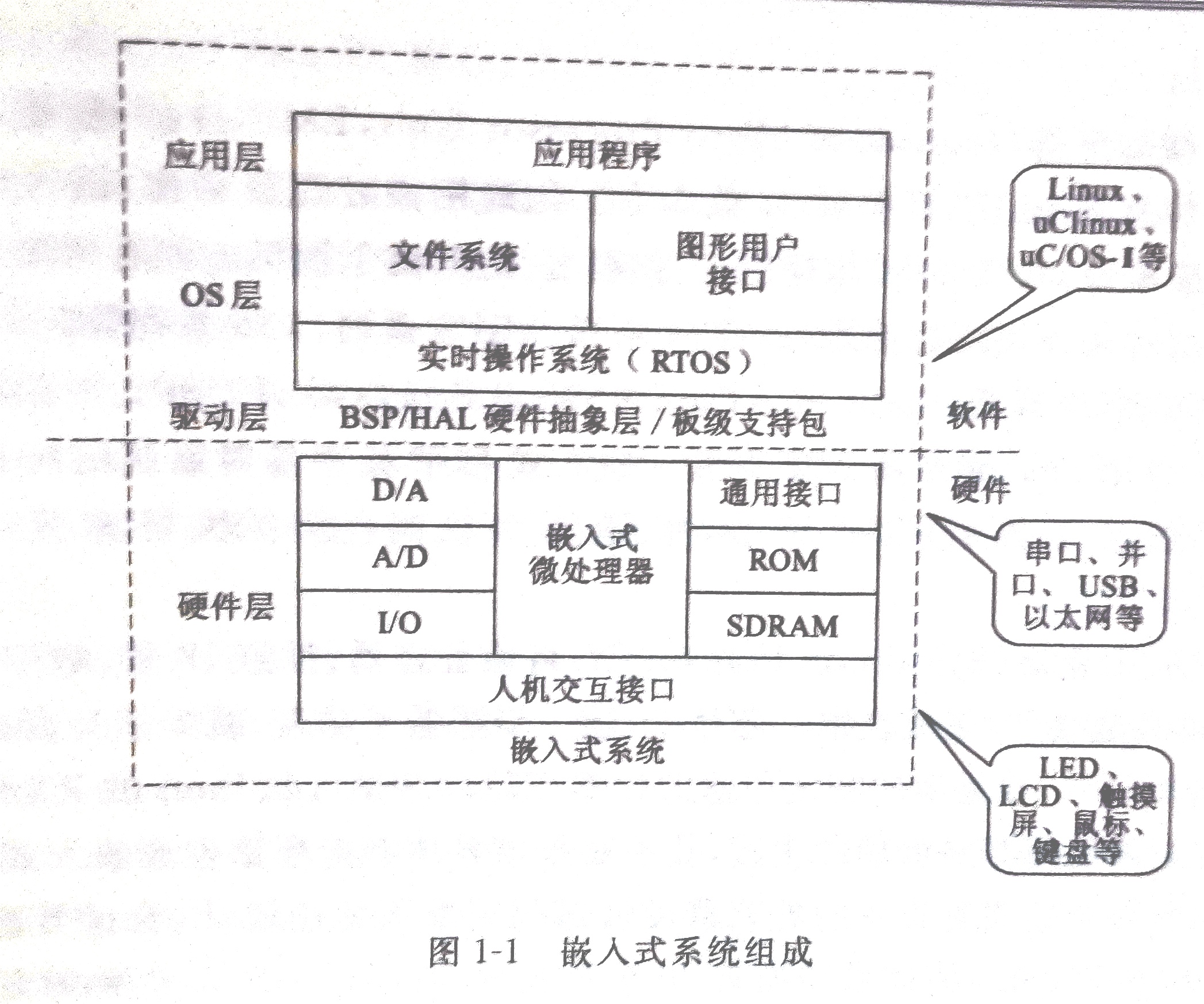
硬件
嵌入式处理器
-
嵌入式微控制器(Micro Controller Unit,MCU)/ 单片机
-
嵌入式微处理器(Embedded Micro Processor Unit,EMPU)
各公司产品
-
ARM 微处理器
ARM 公司提供 IP 授权生产的芯片,占据 32 位市场份额 90% 以上
-
MIPS 微处理器
面向高性能、高档次的 32 位和 64 位处理器市场
-
PowerPC
品种良多,覆盖范围广
-
x86
源自 Intel 8080,最早的嵌入式芯片,良好的兼容性限制了其性能发展
-
Motorola 68000
CISC 架构,面向通信应用
-
-
嵌入式DSP处理器(Embedded Digital Signal Processor,EDSP)
-
嵌入式片上系统(System on Chip,SoC)
外围设备
按功能分类
- 存储设备
- 通信设备
- I/O设备/显示设备
按技术分类
- 静态易失型存储器
- RAM
- SRAM
- 动态存储器(DRAM)
- 非易失型存储器
- ROM
- EPROM
- EEPROM
- FLASH(广泛应用)
软件
嵌入式操作系统
- RTOS
- Linux
- Android
- Windows CE
- μC/OS-II
应用软件
- 嵌入式支持软件
- 应用程序
嵌入式系统的发展趋势
- 嵌入式开发是一项系统工程
- 网络化、信息化的要求
- 网络互连、移动互联成为必然趋势
- 精简系统内核、算法,降低功耗和软硬件成本
- 提供友好的多媒体人机页面
第 2 章
ARM 处理器
ARM微处理器采用 RISC 架构
指令集
- ARM指令集
- Thumb指令集
特点
- 体积小、低功耗、低成高性能
- 支持 Thumb (16位)/ ARM 或 Thumb-2(32位)指令集,能很好地兼容 8 位 / 16 位器件
- 大量使用寄存器,指令执行速度更快
- 大多数数据操作都在寄存器中完成
- 寻址方式简单灵活,执行效率高
- 指令长度固定
应用
- 工业控制
- 无线通讯
- 网络应用
- 消费类电子产品
- 成像和安全产品
大端模式与小端模式
设字数据W1=0x12345678,W1_3=0x12,W1_2=0x34,W1_1=0x56,W1_0=0x78
大端模式
数据的高字节保存在内存的低地址中,而数据的低字节保存在内存的高地址中
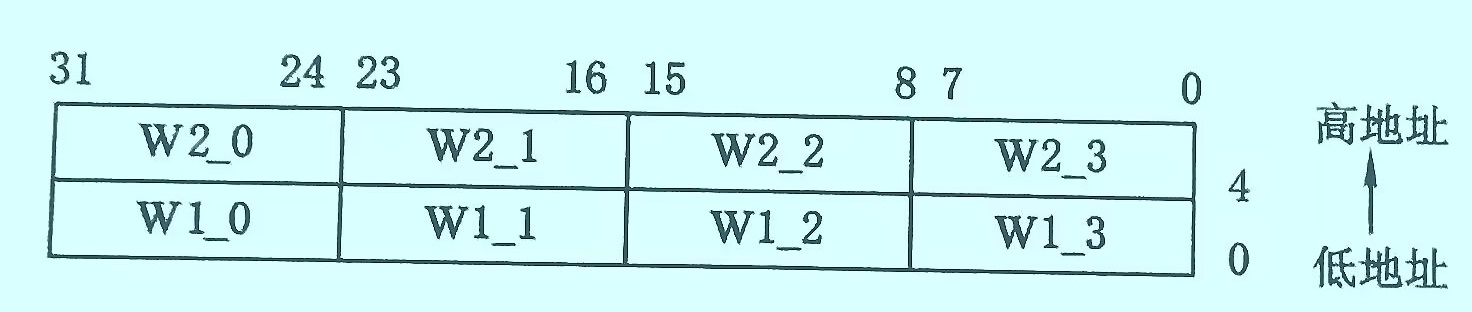
小端模式
数据的高字节保存在内存的高地址中,而数据的低字节保存在内存的低地址中

ARM-Cortex-M3 微控制器
简介
Cortex-M3基础.ppt
- Cortex‐M3 微控制器是一款基于 ARMv7-M 架构的 32 位 RISC(精简指令集计算)处理器内核。内部的数据是32 位的,寄存器是32 位的,存储器接口也是32 位的。
- CM3 采用了哈佛结构,拥有独立的指令总线和数据总线,可以让取指与数据访问并行。这样一来数据访问不再占用指令总线,从而提升了性能。
工作模式
- 线程模式
- 处理模式
工作状态
-
Thumb 状态
16位和32位半字对齐的 Thumb 和 Thumb-2 指令状态
-
调试状态
处理器停止并进入调试
存储格式类型
GPT-4
-
字节 (8 位):Cortex-M3 支持 8 位字节存储格式,用于存储较小的数据,如字符。
-
半字 (16 位):Cortex-M3 支持 16 位半字存储格式,用于存储较大的数据,如短整数。
-
字 (32 位):Cortex-M3 支持 32 位字存储格式,用于存储更大的数据,如整数和浮点数。
Cortex-M3 对半字和字的访问要求进行对齐。对于半字访问,地址必须是 2 的整数倍;对于字访问,地址必须是 4 的整数倍。不对齐的访问可能导致硬件异常。
嵌套向量中断控制器 NVIC
定义
嵌套向量中断控制器( NVIC )是 ARM Cortex -M3处理器中一个完整的部分。 ARM Cortex -M3的所有中断机制都由 NVIC 实现。 NVIC 可以被高度配置,为处理器提供出色的中断处理能力。在 NVIC 的标准执行中,它提供了一个非屏蔽中断( NMI )和32个通用物理中断,这些中断带有8级的抢占优先权。 NVIC 可以通过综合选择配置为1到240个物理中断中的任何一个,并带有多达256个优先级。
末尾连锁技术作用※
在连续两次中断时,将上一次的返回指令和下一次的调用指令执行所花费的时间,由42个Circles降低到6个Circles。
ARM指令系统※
数据传送指令
-
在两个寄存器间传递数据
MOV R8, R3
-
在寄存器与存储器间传递数据
- LDRB Rd, [Rn, #offset]
- STRB Rd, [Rn, #offset]
-
在寄存器与特殊功能寄存器间传递数据
-
MRS <gp_reg>, <special_reg>
功能:读特殊功能寄存器的值到通用寄存器。
-
MSR <special_reg>, <gp_reg>
功能:写通用寄存器的值到特殊功能寄存器。
-
-
把一个立即数加载到寄存器
- MOV R0, #0x12 ; 支持最多8位立即数加载
- 32位指令MOVW和MOVT可以支持16位立即数加载
算术运算指令
| 示例 | 功能描述 |
|---|---|
| ADD Rd, Rn, Rm ; Rd = Rn+Rm ADD Rd, Rm ; Rd += Rm ADD Rd, #imm ; Rd += imm | 常规加法 imm |
| ADC Rd, Rn, Rm ; Rd = Rn+Rm+C ADC Rd, Rm ; Rd += Rm+C ADC Rd, #imm ; Rd += imm+C | 带进位的加法 imm |
| ADDW Rd, #imm12 ; Rd += imm12 | 带 |
| SUB Rd, Rn ; Rd -= Rn SUB Rd, Rn, #imm3 ; Rd = Rn-imm3 SUB Rd, #imm8 ; Rd -= imm8 SUB Rd, Rn, Rm ; Rd = Rm-Rm | 常规减法 |
| SBC Rd, Rm ; Rd -= Rm+C SBC.W Rd, Rn, #imm12 ; Rd= Rn-imm12-C SBC.W Rd, Rn, Rm ; Rd = Rn-Rm-C | 带借位的减法 |
| RSB.W Rd, Rn, #imm12 ; Rd = imm12-Rn RSB.W Rd, Rn, Rm ; Rd = Rm-Rn | 反向减法 |
| MUL Rd, Rm ; Rd = Rm MUL.W Rd, Rn, Rm ; Rd = RnR | 常规乘法 |
| MLA Rd, Rm, Rn, Ra ; Rd = Ra+RmRn MLS Rd, Rm, Rn, Ra ; Rd = Ra-RmR | 乘加与乘减 |
| UDIV Rd, Rn, Rm ; Rd = Rn/Rm SDIV Rd, Rn, Rm ; Rd = Rn/Rm | 硬件支持的除法 |
逻辑操作指令
| 示例 | 功能描述 |
|---|---|
| AND Rd, Rn ; Rd &= Rn AND.W Rd, Rn, #imm12 ; Rd = Rn & imm12 AND.W Rd, Rm, Rn ; Rd = Rm & Rn | 按位与 |
| ORR Rd, Rn ; Rd |= Rn ORR.W Rd, Rn, #imm12 ; Rd = Rn | imm12 ORR.W Rd, Rm, Rn ; Rd = Rm | Rn | 按位或 |
| BIC Rd, Rn ; Rd &= ~Rn BIC.W Rd, Rn, #imm12 ; Rd = Rn & ~imm12 BIC.W Rd, Rm, Rn ; Rd = Rm & ~Rn | 位段清零 |
| ORN.W Rd, Rn, #imm12 ; Rd = Rn | ~imm12 ORN.W Rd, Rm, Rn ; Rd = Rm | ~Rn | 按位或反码 |
| EOR Rd, Rn ; Rd ^= Rn EOR.W Rd, Rn, #imm12 ; Rd = Rn ^ imm12 EOR.W Rd, Rm, Rn ; Rd = Rm ^ Rn | (按位)异或,异或总是按位的 |
子程调用与无条件跳转指令
-
最基本的无条件跳转指令
-
B Lable;跳转到Lable处对应的地址
-
BX reg;跳转到由寄存器reg给出的地址
在BX中,reg的最低位指示出在转移后将进入的状态,必须保证reg的LSB=1
-
-
调用子程序时,使用的指令的助记符为BL。如:
-
BL Lable; 跳转到Lable对应的地址,并且将跳转前的下条指令地址保存到LR
-
BLX reg; 跳转到由寄存器reg给出的地址,并根据reg的LSB切换处理器状态,还要将跳转前的下条指令地址保存到LR
BLX还带有改变状态的功能。因此,reg的LSB必须是1,以确保不会试图进入ARM状态,否则会出现Fault。
-
-
BX LR ;从子程序返回
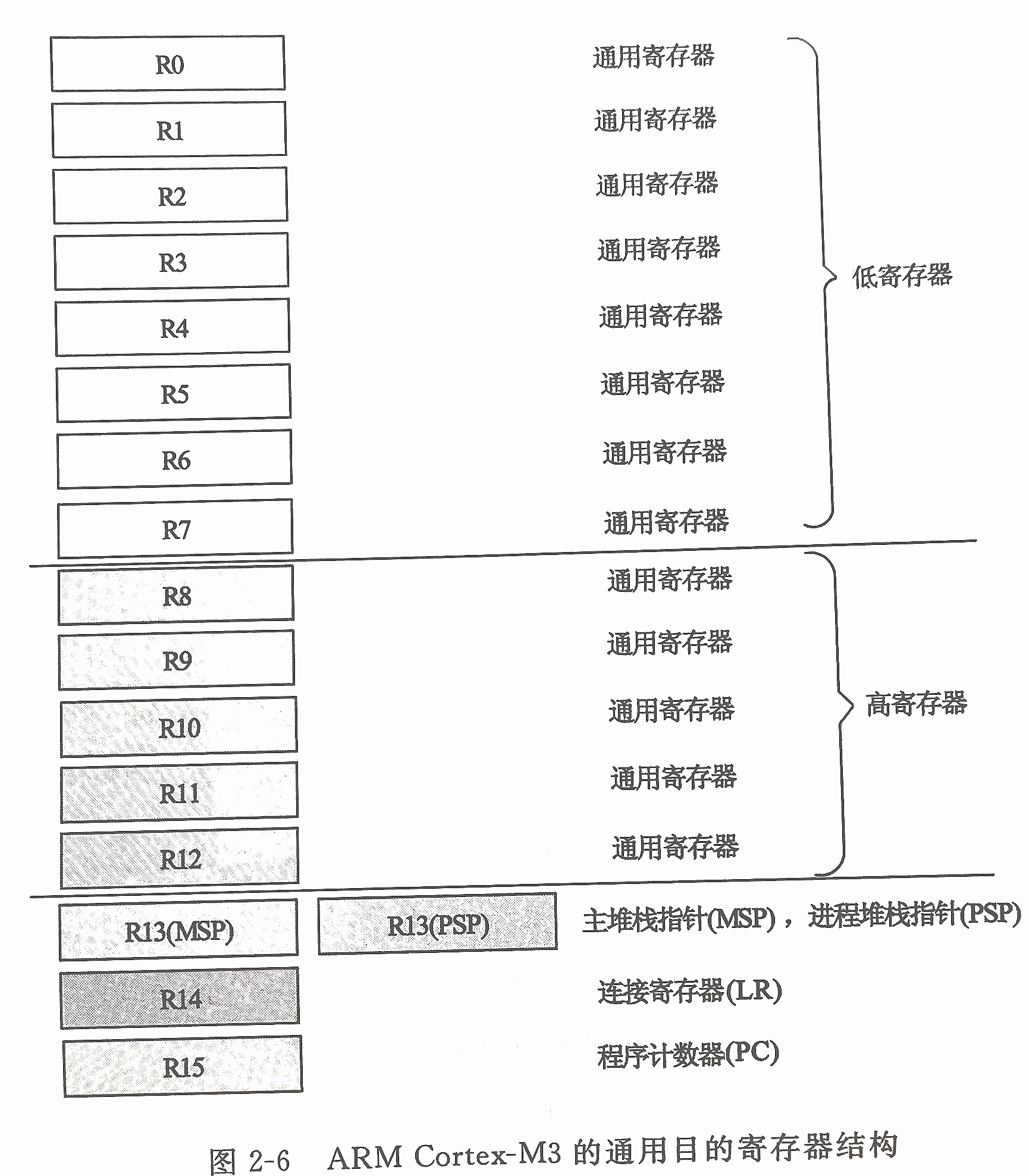
寄存器组织
通用寄存器
-
低寄存器,R0~R7。
可以被指定通用寄存器的所有指令访问,复位后的初始值是不可预知的。
-
高寄存器,R8~R12。
可以被指定通用寄存器的所有32位指令访问,但不能被16位指令访问,复位后的初始值是不可预知的。
-
堆栈指针,R13( SP )。
- 由于 SP 忽略了写入位[1:0]的值,因此它自动与字(即4字节边界)对齐。
- 堆栈指针对应两个物理寄存器 SP_main 和 SP_process ,处理模式始终使用 SP_main ,而线程模式可配置为 SP_main 或 SP_process 。尽管有两个 SP ,但在某个时刻只能看到/访问其中的一个,这也就是所谓的"banked"寄存器。
-
链接寄存器,R14( LR )。
- 在执行分支( branch )和链接( BL )指令或带有交换的分支和链接指令( BLX )时, LR 用于接收(存储)来自 PC 的返回地址。
- LR 也用于异常返回,其他任何时候都可以将R14看做一个通用寄存器。
-
程序计数器,R15(PC)
- 指向当前的程序地址。该寄存器的位0始终为0
- 指令始终与字或半字边界对齐。如果修改它的值,就能达到改变程序执行流程的目的。
特殊功能寄存器
-
程序状态字寄存器组PSRs
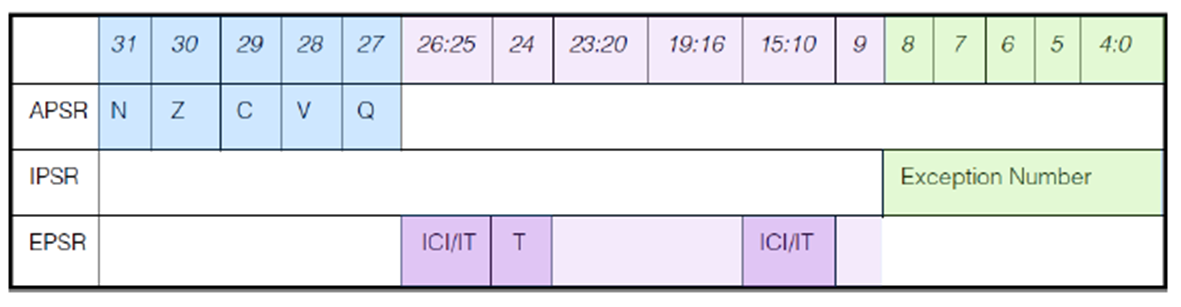
- 应用程序 PSR(APSR)
- 中断号 PSR(IPSR)
- 执行 PSR(EPSR)
这3 个寄存器既可以单独访问,也可以组合访问(2 个组合,3 个组合都可以),当使用三合一的方式访问时,应使用名字“xPSR”或者“PSRs”。

-
中断屏蔽寄存器组PRIMASK, FAULTMASK, BASEPRI
-
控制寄存器CONTROL
存储映射
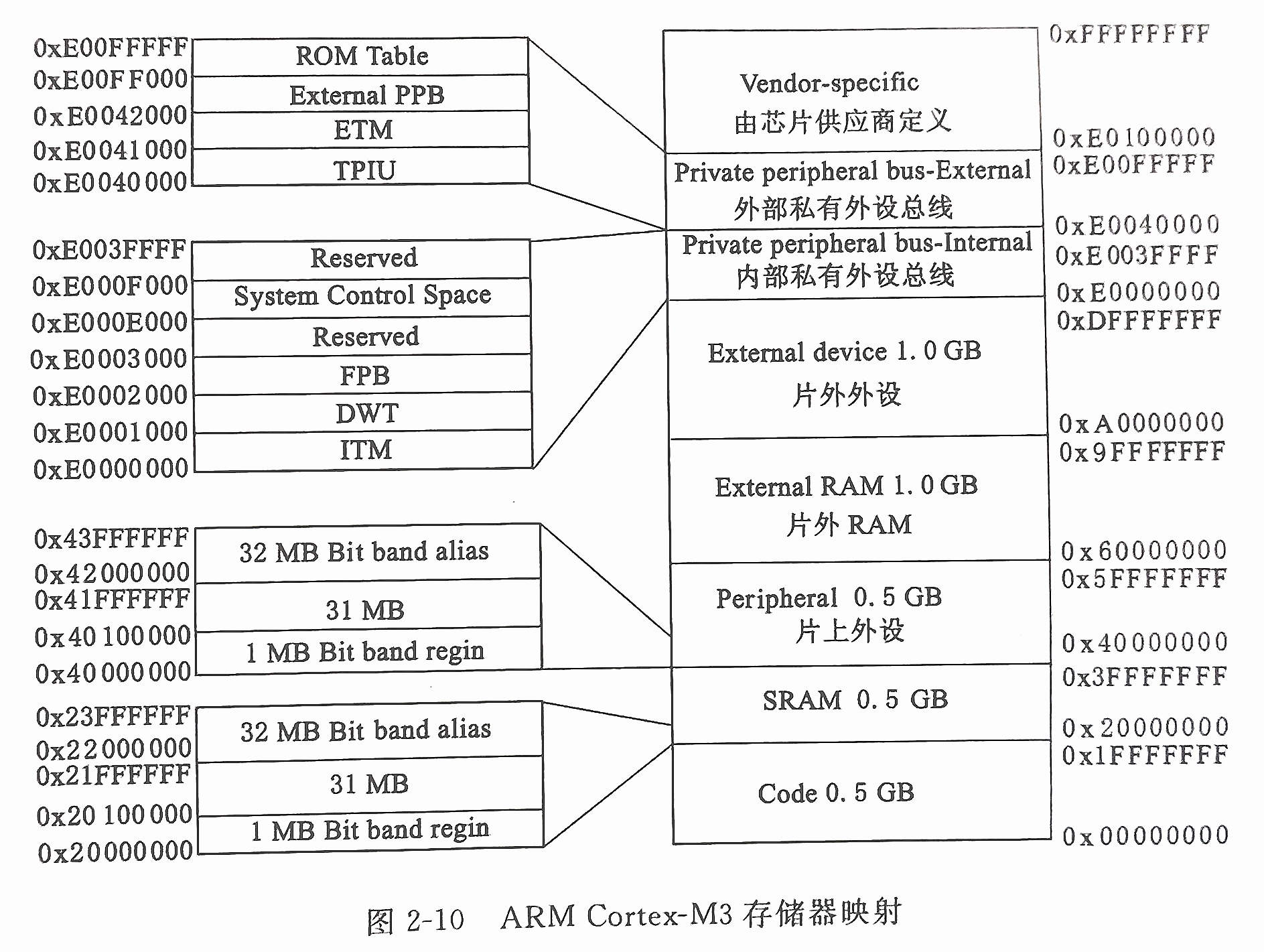
基本特征
Cortex-M3基础.ppt
- Cortex-M3的存储系统采用统一编址方式,小端模式。
- 4GB 的线性地址空间内,寻址空间被分成 8 个主块:block0-block7,每块512MB
- 片内Flash:从 0x00000000开始
- 片内SRAM:从 0x20000000开始
- 包括
- 代码空间
- 数据空间
- 位段、位段别名
- 寄存器
- 片上外设
- 外部存储器
- 外部外设
存储区映射
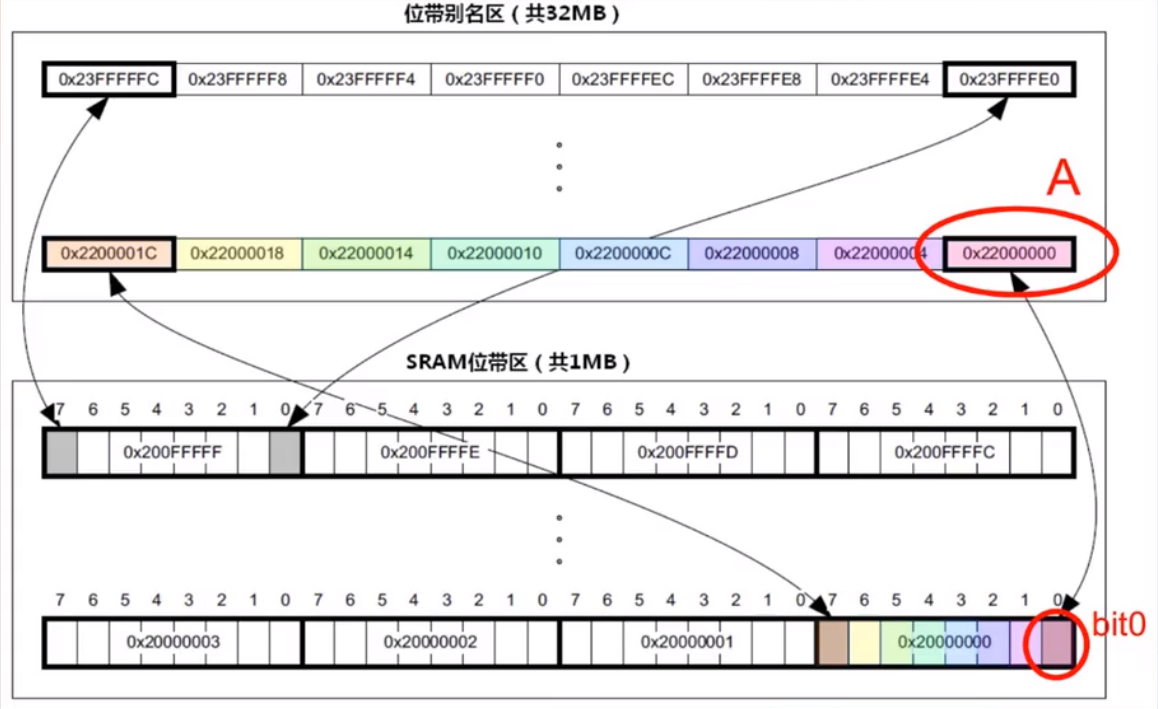
位带操作及计算
-
定义:位带别名技术是一种常用的操作内存的方法,可以将一个位的访问转化为对内存的访问,以便更方便地对单个位进行操作。在STM32中,位带别名技术可以通过位带映射区域来实现。
-
公式:位带别名地址 = 位带映射区域起始地址 + (原始地址 - 0x20000000) × 32 + 位在字节中的偏移量 × 4
其中,位带映射区域起始地址为0x22000000,原始地址每个位所占的地址空间为32位,位在字节中的偏移量指的是位在8位字节中的偏移量,范围为0到7。
-
举例:第2位的别名地址应该是0x22000000 + 2x4 = 0x22000008。
-
例题:[选择题 40 题](…/嵌入式选择题-from hqh.md#题目列表)
异常与中断
异常
正常程序执行流程发生暂时停止的情形
中断
外部事件导致的程序执行流程改变
联系
中断是一种特殊的异常
原理
ARM Cortex-M3的所有中断机制都由[NVIC](###嵌套向量中断控制器 NVIC)实现。NVIC除了支持240 个外部中断之外,还支持11个内部异常源。ARM Cortex-M3 处理器和嵌套向量中断控制器(NVIC)对所有异常按优先级进行排序并处理。
异常类型
-
编号是指异常入口相对于向量起始表处以字为单位的偏移量
-
数字越小,优先级越高
-
0~15号异常中有5个是保留的(11个内部异常源)。1~15号为系统异常的编号,没有编号为0的异常,一般该地址设置MSP的初始值。
主堆栈指针(Main Stack Pointer,MSP)
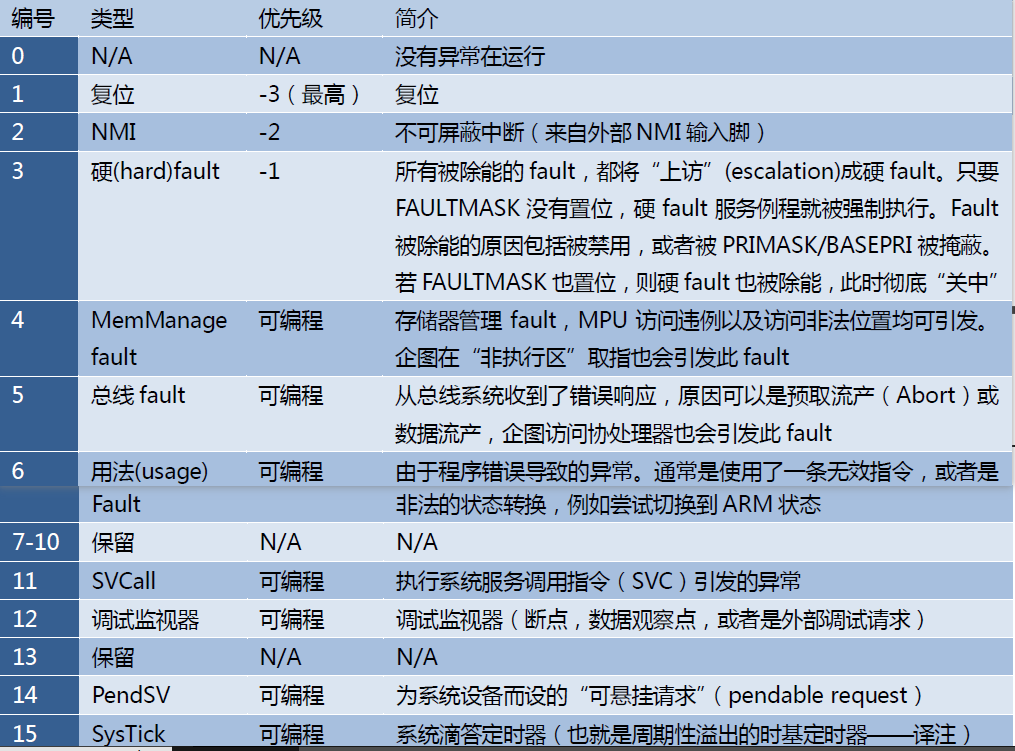
-
从16开始的所有编号为外部中断对应的异常的编号。

-
向量表的每个入口地址都是32位整数
- 0号异常表项地址偏移量:0x00
- 11号异常表项地址偏移量:0x00+4*11=0x2c
优先级
优先级判断
- 具有高抢占式优先级的中断(数值大)可以在具有低抢占式优先级的中断(数值小)处理过程中被响应,即中断嵌套,或者说高抢占式优先级的中断可以嵌套低抢占式优先级的中断。
- 当两个中断源的抢占式优先级相同时
- 这两个中断将没有嵌套关系,当一个中断到来后,如果正在处理另一个中断,这个后到来的中断就要等到前一个中断处理完之后才能被处理。
- 如果两个中断同时到达,则中断控制器根据他们的响应优先级高低来决定先处理哪一个;如果他们的抢占式优先级和响应优先级都相等,则根据他们在中断表中的排位顺序决定先处理哪一个。
抢占优先级(主优先级)和响应优先级(次优先级)的区别
- 高优先级的抢占优先级是可以打断正在进行的低抢占优先级中断的。
- 抢占优先级相同的中断,高响应优先级不可以打断低响应优先级的中断。
- 抢占优先级相同的中断,当两个中断同时发生的情况下,哪个响应优先级高,哪个先执行。
- 如果两个中断的抢占优先级和响应优先级都是一样的话,则看哪个中断先发生就先执行。
优先级分组
- 在Cortex-M3中定义了8个比特位用于设置中断源的优先级,这8个比特位在NVIC应用中断与复位控制寄存器(AIRCR)的中断优先级分组域中,可以有8种分配方式,其中至少要有最低1位用于指定响应优先级
- 原则上,ARM Cortex-M3 支持3个固定的高优先级,并且支持128级抢占。但是绝大多数芯片在设计时会裁掉表达优先级的几个低端有效位,以减少优先级的级数
- ARM Cortex-M3 优先级配置寄存器使用位数∈[3,8],对应优先级级数∈[8,256]
中断管理方法❓
分组配置是在SCB->AIRCR中断分组设置
| 组 | AIRCR[10:8] | IP bit[7:4] 分配情况 | 分配结果 |
|---|---|---|---|
| 0 | 111 | 0:4 | 0位抢占优先级,4位响应优先级 |
| 1 | 110 | 1:3 | 1位抢占优先级,3位响应优先级 |
| 2 | 101 | 2:2 | 2位抢占优先级,2位响应优先级 |
| 3 | 100 | 3:1 | 3位抢占优先级,1位响应优先级 |
| 4 | 011 | 4:0 | 4位抢占优先级,0位响应优先级 |
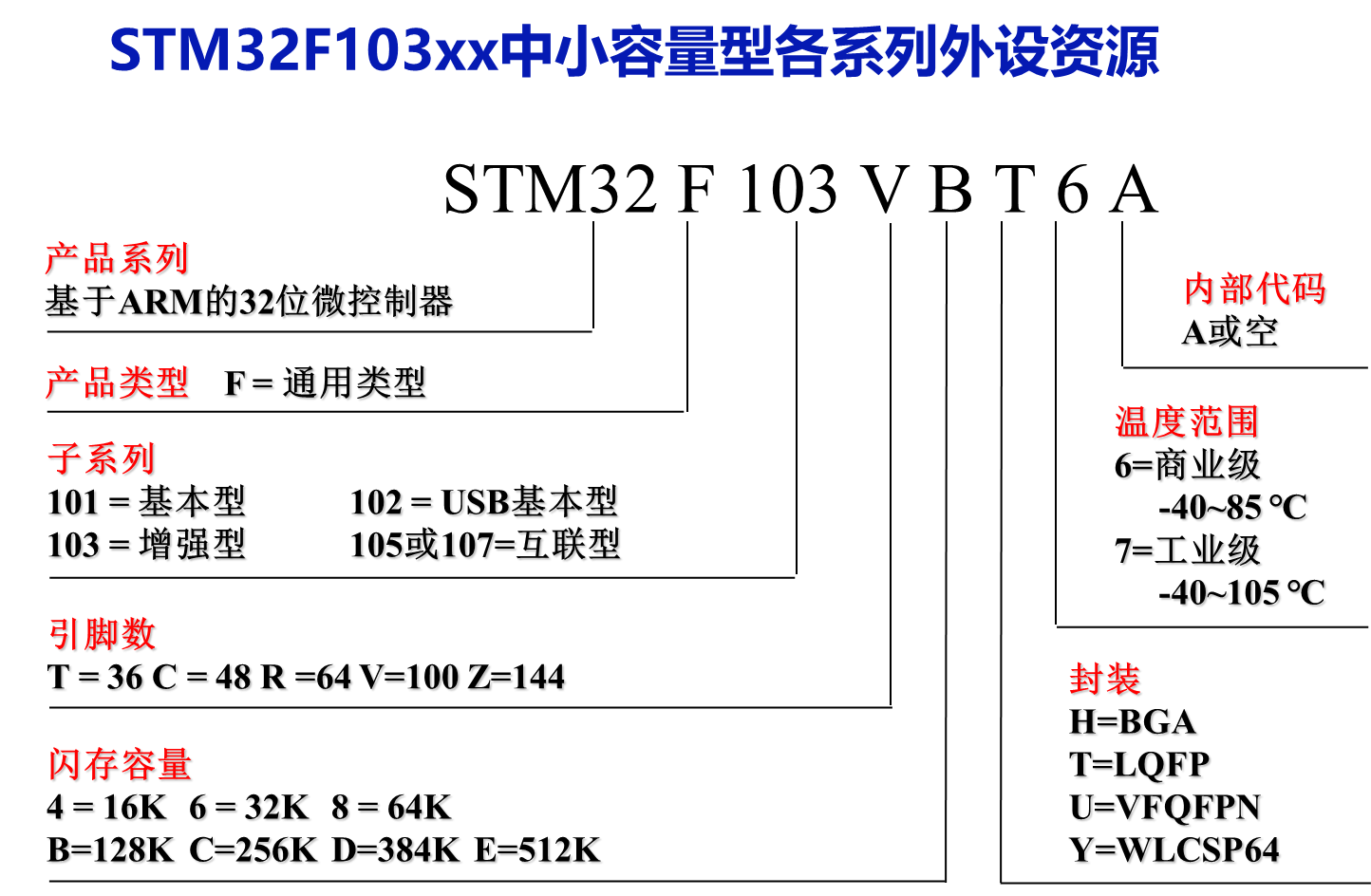
STM32处理器
STM32F103VBT6 是 STM32F103xxx 系列 ARM Cortex-M3 处理器中的一种
中断
STM32 103系列有16个内核中断,60个可屏蔽中断,16级可编程的中断优先级。
时钟源与时钟树
时钟源简表
| 简称 | 名称 | 频率 | 作用 | 来源 | 相关的重要寄存器(位) | 特点 |
|---|---|---|---|---|---|---|
| HSE | 高速外部时钟 | 4~16MHz | 驱动系统时钟 | 外部晶体/陶瓷振荡器,或用户外部时钟 | RCC_CR中的HSEON、HSERDY、HSEBYP位。 | 时钟频率精度高 |
| LSE | 低速外部时钟 | 32.768kHz | 驱动RTC | 外部晶体或陶瓷谐振器,或外部时钟 | RCC_BDCR中的LSEON、LSERDY、LSEBYP位 | 为实时时钟或者其他定时功能提供低功耗且精确的时钟源 |
| HSI | 高速内部时钟 | 8MHz | 驱动系统时钟 | 内部8MHz的RC振荡器 | RCC_CR中的HSION、HSIRDY、HSITRIM[4:0]位。 | 启动时间比HSE晶体振荡器短,但时钟频率精度较差。可在HSE晶体振荡器失效时作为备用时钟源。 |
| LSI | 低速内部时钟 | 约40kHz (30kHz ~ 60kHz) | 为独立看门狗、RTC和自动唤醒单元提供时钟 | 内部RC振荡器 | RCC_CSR中的的LSION、LSIRDY | 可以在停机和待机模式下保持运行 |
| PLL | 锁相环时钟 | <=72MHz | 驱动系统时钟 | HIS或HSE |
时钟源相关寄存器
位于片上外设存储区,地址范围是0x4002_1000-0x4002_13FF
- 时钟控制寄存器(RCC_CR)。复位值: 0x000 XX83,X代表未定义。偏移量0x0。
- 时钟配置寄存器(RCC_CFGR)。复位值: 0x0000 0000。偏移量0x4。
- 时钟中断寄存器(RCC_CIR)。复位值: 0x0000 0000。偏移量0x8。
- 备份域控制寄存器(RCC_BDCR)。复位值:0x0000 0000。偏移量0x20。
- 控制/状态寄存器(RCC_CSR)。复位值:0x0C00 0000。偏移量0x24。
STM32F10xxx 系列的 GPIO
通用输入/输出口(General Purpose I/O,GPIO)是一个灵活的由软件控制的数字信号,每个GPIO都代表一个连接到CPU特定引脚的一个位。
三态
-
0态
在0态下,GPIO输出低电平;
-
1态。
在1态下,GPIO输出高电平。
-
高阻态
在高阻状态下,既不输出高电平也不输出低电平;
I/O端口寄存器
-
32 位
- 配置寄存器:GPIOx_CRL、GPIOx_CRL
- 数据寄存器:GPIOx_IDR、GPIOx_ODR
- 置位/复位寄存器:GPIOx_BSRR
- 锁定寄存器:GPIOx_LCKR
-
16 位
复位寄存器:GPIOx_BRR
GPIO端口特点
- 通用I/O(GPIO)
- 单独的位设置或清除
- 所有端口都有外部中断能力
- 复用功能
- 软件重映射I/O复用功能
- GPIO锁定机制
GPIO端口模式
STM32的GPIO端口的每一位都可以由软件配置成多种模式
- 输入浮空
- 输入上拉
- 输入下拉
- 模拟输入
- 开漏输出
- 推挽式输出
- 推挽式复用功能
- 开漏复用功能
输出模式速度
- 2 MHz
- 10 MHZ
- 50 MHz
第 3 章
嵌入式开发环境
交叉编译
定义
交叉编译(Cross-Compilation)是指在某个平台上(如PC)用交叉编译器编译出可在其他平台(如ARM)运行的代码的过程
工具
在主机平台上安装对应的交叉编译工具链(cross compilation tool chain),然后用它编译程序源代码,最终生成可在目标平台上运行的代码
嵌入式软件调试方法
- 指令集模拟器
- 驻留监控软件
- JTAG 仿真器
- 在线仿真器
嵌入式软件调试工具
- J-LINK
- H-JTAG 调试代理
- Banyan Daemon
- U_LINK 仿真器
- J-LINK 仿真器
第 4 章
GPIO 实验
流水灯程序
代码
main.c
/******************************流水灯************************
* 流水灯
* 现象:二极管从左至右依次全部点亮
*************************************************************/
#include "sys.h"
#include "delay.h"
#include "led.h"
u8 light;
int main( void )
{
Stm32_Clock_Init( 6 ); //6倍频
delay_init( 72 ); //12M外部晶振
LED_Init();
GPIOE->ODR &= ~(0xff<<8);
LED_SEL = 1; //选择二极管
light = 0x01;
while( 1 )
{
GPIOE->ODR |= (light<<8);
delay_ms( 300 );
light = light<<1;
if( light==0x00 )
{
GPIOE->ODR &= ~(0xff<<8);
delay_ms( 300 );
light = 0x01;
}
}
}
led.c
/*********************二极管及数码管初始化或实现********************
* 湖南科技大学
******************************************************************/
#include "led.h"
/***************************数码管段选***************************/
u8 segTable[] = {0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f};
u8 segTablePortation[] = {0xbf,0x86,0xdb,0xcf,0xe6,0xed,0xfd,0x87,0xff,0xef};
/****************************************************
* 初始化二极管LED灯的引脚端口
******************************************************/
void LED_Init(void)
{
RCC->APB2ENR|=1<<0; //使能AFIO
RCC->APB2ENR|=1<<3; //使能PORTB时钟
RCC->APB2ENR|=1<<6; //使能PORTE时钟
AFIO->MAPR |= 0x02000000; //设置PB.3为I/O口可用,且可以SW仿真
GPIOB->CRL &= 0xFFFF0FFF;
GPIOB->CRL |= 0x00003000; //PB.3推挽输出
GPIOB->ODR |= 0x00000008; //PB.3输出高
GPIOE->CRH&=0X00000000;
GPIOE->CRH|=0X33333333; //PE.8-15推挽输出
GPIOE->ODR|=0x0000ff00; //PE.8-15输出低
}
/***************************************
* 流水灯选择,或数码管段选
* value:显示的数值对应的段选二进制值
****************************************/
void LedValue(u8 value)
{
LED0 = (value&0x01)?1:0;
LED1 = (value&0x02)?1:0;
LED2 = (value&0x04)?1:0;
LED3 = (value&0x08)?1:0;
LED4 = (value&0x10)?1:0;
LED5 = (value&0x20)?1:0;
LED6 = (value&0x40)?1:0;
LED7 = (value&0x80)?1:0;
}
/***************************************
* 数码管显示不带小数点的数值
* 参数 w:显示的位置,即位选,左-右:0-7
* value:要显示的数值
****************************************/
void SetLed(u8 w, u8 value)
{
SEL0 = w%2;
SEL1 = w/2%2;
SEL2 = w/4;
LedValue(segTable[value]);
}
/***************************************
* 数码管显示带小数点的数值
* 参数 w:显示的位置,即位选,左-右:0-7
* value:要显示的数值
****************************************/
void PortationDisplay(u8 w, u8 value)
{
SEL0 = w%2;
SEL1 = w/2%2;
SEL2 = w/4;
LedValue( segTablePortation[value] );
}
八段数码管显示程序
LED数码管引脚定义
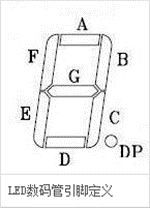
位 0: a (顶部水平段)
位 1: b (右上角垂直段)
位 2: c (右下角垂直段)
位 3: d (底部水平段)
位 4: e (左下角垂直段)
位 5: f (左上角垂直段)
位 6: g (中间水平段)
位 7: dp (小数点)
共阴极数码管0-F段编码
unsigned char code table[] = { //共阴极 0—F 数码管编码
0x3f, 0x06, 0x5b, 0x4f, //0~3
0x66, 0x6d, 0x7d, 0x07, //4-7
0x7f, 0x6f, 0x77, 0x7c, //8~b
0x39, 0x5e, 0x79, 0x71 //c~f
//0x00//数码管不显示
//0x40//显示-(中间水平段)
}
代码
main.c
/******************************8位数码管动态扫描************************
* 8位数码管动态扫描
* 每位数码管显示的数字从0加到9
***********************************************************************/
#include "sys.h"
#include "delay.h"
#include "led.h"
#define uchar unsigned char
uchar show_w1,show_w2,show_w3,show_w4,show_w5,show_w6,show_w7,show_w8,flag,count;
uchar seg[] = {0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f};
/***************************主函数*****************************/
int main()
{
//uchar i;
Stm32_Clock_Init( 6 );
delay_init( 72 );
LED_Init();
LED_SEL = 0;
show_w1=0;
show_w2=1;
show_w3=2;
show_w4=3;
show_w5=4;
show_w6=5;
show_w7=6;
show_w8=7;
while(1)
{
SetLed(0, show_w1%10);
delay_ms(100);
SetLed(1, show_w2%10);
delay_ms(100);
SetLed(2, show_w3%10);
delay_ms(100);
SetLed(3, show_w4%10);
delay_ms(100);
SetLed(4, show_w5%10);
delay_ms(100);
SetLed(5, show_w6%10);
delay_ms(100);
SetLed(6, show_w7%10);
delay_ms(100);
SetLed(7, show_w8%10);
delay_ms(100);
show_w1++;
show_w2++;
show_w3++;
show_w4++;
show_w5++;
show_w6++;
show_w7++;
show_w8++;
}
}
led.c
/****************LED灯有关实现函数********************
* 作者:宁晓兰
******************************************************************/
#include "led.h"
/***************************数码管段选***************************/
u8 segTable[] = {0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f};
u8 segTablePortation[] = {0xbf,0x86,0xdb,0xcf,0xe6,0xed,0xfd,0x87,0xff,0xef};//带小数点
/****************************************************
* 初始化二极管LED灯的引脚端口
******************************************************/
void LED_Init()
{
RCC->APB2ENR|=1<<0; //使能AFIO
RCC->APB2ENR|=1<<3; //使能PORTB时钟
RCC->APB2ENR|=1<<6; //使能PORTE时钟
AFIO->MAPR |= 0x02000000; //复用口设置 设置PB.3为I/O口可用,且可以SW仿真
GPIOB->CRL &= 0xFFFF0000;
GPIOB->CRL |= 0x00003333; //PB.3推挽输出
GPIOB->ODR |= 0x000000FF; //PB.3输出高
GPIOE->CRH&=0X00000000;
GPIOE->CRH|=0X33333333; //PE.8-15推挽输出
GPIOE->ODR|=0x0000FF00; //PE.8-15输出高
}
/***************************************
* 流水灯选择,或数码管段选
* 将传入的数值value转换成对应的段选二进制值,再通过GPIOE寄存器写入到对应的引脚上,从而实现数码管的控制。
* value:显示的数值对应的段选二进制值
****************************************/
void LedValue(u8 value)
{
GPIOE->ODR &= ~(0xff<<8);//置为0,清空显示
GPIOE->ODR |= value<<8;//对应位置位
// LED0 = (value&0x01)?1:0;
// LED1 = (value&0x02)?1:0;
// LED2 = (value&0x04)?1:0;
// LED3 = (value&0x08)?1:0;
// LED4 = (value&0x10)?1:0;
// LED5 = (value&0x20)?1:0;
// LED6 = (value&0x40)?1:0;
// LED7 = (value&0x80)?1:0;
}
/***************************************
* 数码管显示不带小数点的数值
* 参数 w:显示的位置,即位选,左-右:0-7
* value:要显示的数值
****************************************/
void SetLed(u8 w, u8 value)
{
//SEL0、SEL1、SEL2分别是控制数码管位选的引脚。
SEL0 = w%2;//最低位
SEL1 = w/2%2;//第二位
SEL2 = w/4;//最高位
LedValue(segTable[value]);
}
/***************************************
* 数码管显示带小数点的数值
* 参数 w:显示的位置,即位选,左-右:0-7
* value:要显示的数值
****************************************/
void PortationDisplay(u8 w, u8 value)
{
SEL0 = w%2;
SEL1 = w/2%2;
SEL2 = w/4;
LedValue( segTablePortation[value] );
}
按键原理
键盘扫描
- 现成的键盘扫描芯片,如8279
- 自行编写键盘扫描程序
- 交叉扫描
- 原理
- 将 I / O 口分成两组,分别作为行和列,形成一个键盘矩阵。扫描每隔一段时间进行一次,如50ms。
- 扫描时,先将行作为输出,列作为输入。先在第一行输出L(低电平),其余行输出高电平,读取N列的值,如果有L,则说明在这一列上有按键按下;然后将行变为输入,列变为输出,在该列输出L,其余列输出H,读出M行的值,哪一行为L,则说明该行与该列交叉的按键被按下,这样便得到了键的ID
- 在扫描过程中,如果有多行或者多列读出来的值为L,则说明有多个按键按下。
- 特点
- 键数多
- 处理复杂
- 原理
- 直接扫描
- 原理
- 每个端口直接与按键相连,依次扫描各端口,直接获取按键值
- 特点
- 键数少
- 处理简单
- 原理
- 交叉扫描
去抖动
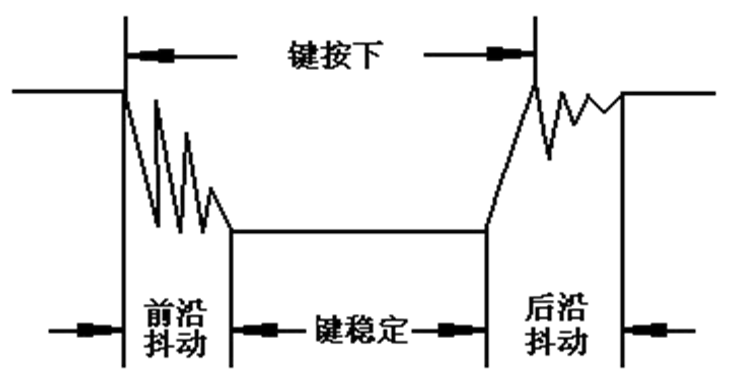
- 按键机械时间—ms级
- 处理时间—us级
- 采用软件延时的方法去除抖动
- 检测按键动作,延迟10ms再次检测,若仍为动作电平则接受为按键
- 检测到按键释放(端口为高电平)时延迟10ms再检测,再对键值进行处理
中断过程与中断程序设计(键盘扫描程序)
main.c
#include "sys.h"
#include "delay.h"
#include "led.h"
#include "key.h"
//按键输入实验
int main(void)
{
u8 t;
Stm32_Clock_Init(9); //系统时钟设置
delay_init(72); //延时初始化
LED_Init(); //初始化与LED连接的硬件接口
KEY_Init(); //初始化与按键连接的硬件接口
while(1)
{
t=KEY_Scan();//得到键值
if(t)
{
switch(t)
{
case 1:
LED0=!LED0;
break;
case 2:
LED3=!LED3;
break;
case 3:
LED7=!LED7;
break;
}
}else delay_ms(10);
}
}
led.c
/*********************二极管及数码管初始化或实现********************
*
******************************************************************/
#include "led.h"
/***************************数码管段选***************************/
u8 segTable[] = {0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f};
u8 segTablePortation[] = {0xbf,0x86,0xdb,0xcf,0xe6,0xed,0xfd,0x87,0xff,0xef};
/****************************************************
* 初始化二极管LED灯的引脚端口
******************************************************/
void LED_Init(void)
{
RCC->APB2ENR|=1<<0; //使能AFIO
RCC->APB2ENR|=1<<3; //使能PORTB时钟
RCC->APB2ENR|=1<<6; //使能PORTE时钟
AFIO->MAPR |= 0x02000000; //设置PB.3为I/O口可用,且可以SW仿真
GPIOB->CRL &= 0xFFFF0FFF;
GPIOB->CRL |= 0x00003000; //PB.3推挽输出
GPIOB->ODR |= 0x00000008; //PB.3输出高
GPIOE->CRH&=0X00000000;
GPIOE->CRH|=0X33333333; //PE.8-15推挽输出
GPIOE->ODR|=0x00000000; //PE.8-15输出低
}
/***************************************
* 流水灯选择,或数码管段选
* value:显示的数值对应的段选二进制值
****************************************/
void LedValue(u8 value)
{
LED0 = (value&0x01)?1:0;
LED1 = (value&0x02)?1:0;
LED2 = (value&0x04)?1:0;
LED3 = (value&0x08)?1:0;
LED4 = (value&0x10)?1:0;
LED5 = (value&0x20)?1:0;
LED6 = (value&0x40)?1:0;
LED7 = (value&0x80)?1:0;
}
/***************************************
* 数码管显示不带小数点的数值
* 参数 w:显示的位置,即位选,左-右:0-7
* value:要显示的数值
****************************************/
void SetLed(u8 w, u8 value)
{
SEL0 = w%2;
SEL1 = w/2%2;
SEL2 = w/4;
LedValue(segTable[value]);
}
/***************************************
* 数码管显示带小数点的数值
* 参数 w:显示的位置,即位选,左-右:0-7
* value:要显示的数值
****************************************/
void PortationDisplay(u8 w, u8 value)
{
SEL0 = w%2;
SEL1 = w/2%2;
SEL2 = w/4;
LedValue( segTablePortation[value] );
}
key.c
#include "key.h"
#include "delay.h"
//按键输入 驱动代码
//PC0.1.2 设置成输入
void KEY_Init(void)
{
RCC->APB2ENR|=1<<4; //使能PORTC时钟
GPIOC->CRL&=0XFFFFF000;//PC0-2设置成输入
GPIOC->CRL|=0X00000888;
}
//按键处理函数
//返回按键值
//0,没有任何按键按下
//1,KEY1按下
//2,KEY2按下
//3,KEY3按下
//注意此函数有响应优先级,KEY1>KEY2>KEY3!!
//如果同时按下了多个按键,只有优先级最高的按键会被响应,其他的将被忽略。
u8 KEY_Scan(void)
{
static u8 key_up=1;//按键按松开标志
//当key_up为1且任意一个按键被按下时,说明有按键被按下,此时进行去抖动处理并将key_up置为0,表示按键被按下。
if(key_up && (KEY1==0 || KEY2==0 || KEY3==0))
{
delay_ms(10);//去抖动
key_up=0;
if(KEY1==0)
{
return 1;
}
else if(KEY2==0)
{
return 2;
}
else if(KEY3==0)
{
return 3;
}
}
else if(KEY1==1 && KEY2==1 && KEY3==1)
key_up=1; //当所有按键都没有被按下时,将key_up置为1,以便下一次按键扫描。
return 0;// 无按键按下
}
串口通信原理与程序设计(接收数据处理)
main.c
#include "sys.h"
#include "delay.h"
#include "usart.h"
#include "led.h"
int main( void )
{
/*u8 i = 1;
Stm32_Clock_Init( 6 ); //9倍频
delay_init( 72 ); //12M外部晶振
uart_init( 72, 9600 );
while( 1 )
{
//printf( "i = %d\r\n", i );
i++;
delay_ms( 500 );
}
*/
u8 t;
u8 len;
u16 times=0;
Stm32_Clock_Init(6); //系统时钟设置
delay_init(72); //延时初始化
uart_init(72,9600); //串口初始化为9600
LED_Init(); //初始化与LED连接的硬件接口
while(1)
{
if(USART_RX_STA&0x80)
{
len=USART_RX_STA&0x3f;//得到此次接收到的数据长度
printf("\n Your MSG: \n");
for(t=0;t<len;t++)
{
USART1->DR=USART_RX_BUF[t];
while((USART1->SR&0X40)==0);//等待发送结束
}
printf("\n\n");//插入换行
USART_RX_STA=0;
}else
{
times++;
if(times%5000==0)
{
printf("\nSTM32A Usart\n");
}
if(times%200==0) printf("Please Input end with return\n");
if(times%30==0) LED0=!LED0;//闪烁LED,提示系统正在运行.
delay_ms(10);
}
}
}
usart.c
#include "sys.h"
#include "usart.h"
//
//本程序只供学习使用,未经作者许可,不得用于其它任何用途
//********************************************************************************
//V1.3修改说明
//支持适应不同频率下的串口波特率设置.
//加入了对printf的支持
//增加了串口接收命令功能.
//修正了printf第一个字符丢失的bug
//
//
//加入以下代码,支持printf函数,而不需要选择use MicroLIB
#if 1
#pragma import(__use_no_semihosting)
//标准库需要的支持函数
struct __FILE
{
int handle;
/* Whatever you require here. If the only file you are using is */
/* standard output using printf() for debugging, no file handling */
/* is required. */
};
/* FILE is typedef’ d in stdio.h. */
FILE __stdout;
//定义_sys_exit()以避免使用半主机模式
_sys_exit(int x)
{
x = x;
}
//重定义fputc函数
int fputc(int ch, FILE *f)
{
while((USART1->SR&0X40)==0);//循环发送,直到发送完毕
USART1->DR = (u8) ch;
return ch;
}
#endif
//end
//
#ifdef EN_USART1_RX //如果使能了接收
//串口1中断服务程序
//注意,读取USARTx->SR能避免莫名其妙的错误
u8 USART_RX_BUF[64]; //接收缓冲,最大64个字节.
//接收状态
//bit7,接收完成标志
//bit6,接收到0x0d
//bit5~0,接收到的有效字节数目
u8 USART_RX_STA=0; //接收状态标记
void USART1_IRQHandler(void)
{
u8 res;
if(USART1->SR&(1<<5))//接收到数据
{
res=USART1->DR;
if((USART_RX_STA&0x80)==0)//接收未完成
{
if(USART_RX_STA&0x40)//接收到了0x0d
{
if(res!=0x0a)USART_RX_STA=0;//接收错误,重新开始
else USART_RX_STA|=0x80; //接收完成了
}else //还没收到0X0D
{
if(res==0x0d)USART_RX_STA|=0x40;
else
{
USART_RX_BUF[USART_RX_STA&0X3F]=res;
USART_RX_STA++;
if(USART_RX_STA>63)USART_RX_STA=0;//接收数据错误,重新开始接收
}
}
}
}
}
#endif
//初始化IO 串口1
//pclk2:PCLK2时钟频率(Mhz)
//bound:波特率
//CHECK OK
//091209
//串口初始化
void uart_init(u32 pclk2,u32 bound)
{
float temp;//浮点型临时变量
u16 mantissa;//分频器除法因子的整数部分
u16 fraction;//分频器除法因子的分数部分
temp=(float)(pclk2*1000000)/(bound*16);//得到USARTDIV
mantissa=temp; //得到整数部分
fraction=(temp-mantissa)*16; //得到小数部分
mantissa<<=4;
mantissa+=fraction; //得到分频器除法因子
RCC->APB2ENR|=1<<2; //使能PORTA口时钟
RCC->APB2ENR|=1<<14; //使能串口时钟
GPIOA->CRH&=0XFFFFF00F;
GPIOA->CRH|=0X000008B0;//IO 口状态设置
RCC->APB2RSTR|=1<<14; //复位串口1
RCC->APB2RSTR&=~(1<<14);//停止复位
//波特率设置
USART1->BRR=mantissa; // 波特率设置
USART1->CR1|=0X200C; //1位停止,无校验位.
#ifdef EN_USART1_RX //如果使能了接收
//使能接收中断
USART1->CR1|=1<<8; //PE中断使能
USART1->CR1|=1<<5; //接收缓冲区非空中断使能
//初始化串口中断
MY_NVIC_Init(3,3,USART1_IRQChannel,2);//组2,最低优先级
#endif
}
模数转换原理与程序设计(5.2_ADC_温度与光照-6)
main.c
/******************************温度与光照测量************************
* 温度与光照
* 温度显示与左边,光照显示在右边
******************************************************************/
#include "sys.h"
#include "led.h"
#include "delay.h"
#include "adc.h"
/***************************主函数*****************************/
int main()
{
float adcx = 0.0;
u16 adcValue = 0;
u8 i = 0;
Stm32_Clock_Init( 6 );
delay_init( 72 );
TemperatureAndLightAdcInit();
LED_Init();
LED_SEL = 0;
adcx = GetTemperature(); //使用PC5 ADC1, 通道15
adcValue = GetLightAdc(14); //使用PC4 ADC1, 通道14
while(1)
{
i++;
if( i > 50 ) //大约每隔100个循环周期重新扫描一次ADC的值
{
adcx = GetTemperature(); //使用PC5 ADC1, 通道15
adcValue = GetLightAdc(14); //使用PC4 ADC1, 通道14
i = 0;
}
//温度
SetLed(0, adcx/10);
delay_ms(1);
PortationDisplay(1,(u8)adcx%10);
delay_ms(1);
SetLed(2, (u8)(adcx*10)%10);
delay_ms(1);
//光照
SetLed(4, adcValue/1000);
delay_ms(1);
SetLed(5, adcValue%1000/100);
delay_ms(1);
SetLed(6, adcValue%100/10);
delay_ms(1);
SetLed(7, adcValue%10);
delay_ms(1);
}
}
adc.c
/******************************************************
* 双ADC通道测电压值
* 测量电压应<3.3 PA0或PA1接正极,负极接地
* PA0测量的电压显示与左边,PA1测量的电压值显示与右边
******************************温度与光照测量************************
* 温度与光照
* 温度显示与左边,光照显示在右边
***********************************END******************************
作者:宁晓兰
******************************************************************/
#include "adc.h"
#include "math.h"
/****************初始化函数********************
* 初始化
* IO口初始化、ADC1初始化、ADC2初始化
******************************************************/
void VoltageAdcInit(void)
{
//初始化IO口
RCC->APB2ENR |= 1<<2; //使能PORTA口时钟
GPIOA->CRL &= 0xffffff00; //PA0 1 模拟输入
RCC->CFGR &= ~(3<<14); //分频因子清零
RCC->CFGR |= 2<<14; //6分频 SYSCLK/DIV2=12M ADC时钟设置为12M,ADC1最大时钟不能超过14M!
VoltageAdc1Init();
VoltageAdc2Init();
}
/****************初始化函数********************
* ADC1初始化
******************************************************/
void VoltageAdc1Init(void)
{
RCC->APB2ENR |= 1<<9; //ADC1时钟使能
RCC->APB2RSTR |= 1<<9; //ADC1复位
RCC->APB2RSTR &= ~(1<<9); //复位结束
ADC1->CR1 &= 0xf0ffff; //工作模式清零
ADC1->CR1 |= 0<<16; //独立工作模式
ADC1->CR1 &= ~(1<<8); //非扫描模式
ADC1->CR2 &= ~(1<<1); //单次转换模式
ADC1->CR2 &= ~(7<<17);
ADC1->CR2 |= 7<<17; //SWSTART:软件控制转换
ADC1->CR2 |= 1<<20; //使用外部触发(SWSTART),必须使用一个事件来触发
ADC1->CR2 &= ~(1<<11); //右对齐
ADC1->SQR1 &= ~(0xf<<20);
ADC1->SQR1 &= 0<<20; //1个转换在规则序列中,也就是只转换规则序列1
ADC1->SMPR2 &= 0xfffffff0; //通道0采样时间清空
ADC1->SMPR2 |= 7<<0; //通道0 239.5周期,提高采用时间可以提高精确度
ADC1->CR2 |= 1<<0; //开启AD转换器
ADC1->CR2 |= 1<<3; //使能复位校准
while( ADC1->CR2 & 1<<3 )
; //等待校准结束
ADC1->CR2 |= 1<<2; //开启AD校准
while( ADC1->CR2 & 1<<2 )
; //等待校准结束
}
/****************初始化函数********************
* ADC2初始化
******************************************************/
void VoltageAdc2Init(void)
{
RCC->APB2ENR |= 1<<10; //ADC1时钟使能
RCC->APB2RSTR |= 1<<10; //ADC1复位
RCC->APB2RSTR &= ~(1<<10); //复位结?
ADC2->CR1 &= 0xf0ffff; //工作模式清零
ADC2->CR1 |= 0<<16; //独立工作模式
ADC2->CR1 &= ~(1<<8); //非扫描模式
ADC2->CR2 &= ~(1<<1); //单次转换模式
ADC2->CR2 &= ~(7<<17);
ADC2->CR2 |= 7<<17; //SWSTART:软件控制转换
ADC2->CR2 |= 1<<20; //使用外部触发(SWSTART),必须使用一个事件来触发
ADC2->CR2 &= ~(1<<11); //右对齐
ADC2->SQR1 &= ~(0xf<<20);
ADC2->SQR1 &= 0<<20; //1个转换在规则序列中,也就是只转换规则序列1
ADC2->SMPR2 &= ~(7<<3); //通道1采样时间清空
ADC2->SMPR2 |= 7<<3; //通道1 239.5周期,提高采用时间可以提高精确度
ADC2->CR2 |= 1<<0; //开启AD转换器
ADC2->CR2 |= 1<<3; //使能复位校准
while( ADC2->CR2 & 1<<3 )
; //等待校准结束
ADC2->CR2 |= 1<<2; //开启AD校准
while( ADC2->CR2 & 1<<2 )
; //等待校准结束
}
/****************获取ADC值函数********************
* 获取ADC的值,测量的电压应<3.3 PA0或PA1接正极,负极接地
* adcx: 1表示ADC1; 2表示ADC2
* ch: 通道值
* 返回得到的ADC的值
******************************************************/
u16 GetAdc(u8 adcx, u8 ch)
{
u16 adcValue = 0;
if( adcx==1 )
{
//设置转换序列
ADC1->SQR3 &= 0xffffffe0; //规则序列1 通道ch
ADC1->SQR3 |= ch;
ADC1->CR2 |= 1<<22; //启动规则转换通道
while( !(ADC1->SR & 1<<1) )
; //等待转换结束
adcValue = ADC1->DR;
}
else if( adcx==2 )
{
//设置转换序列
ADC2->SQR3 &= 0xffffffe0; //规则序列1 通道ch
ADC2->SQR3 |= ch;
ADC2->CR2 |= 1<<22; //启动规则转换通道
while( !(ADC2->SR & 1<<1) )
; //等待转换结束
adcValue = ADC2->DR;
}
return adcValue; //返回ADC的值
}
/****************获取电压值函数********************
* ADC转化为电压值
* adcx: 1表示ADC1; 2表示ADC2
* ch: 通道值
* 返回电压值
******************************************************/
float GetVoltage(u8 adcx, u8 ch)
{
u16 adcValue = 0;
float vol = 0;
adcValue = GetAdc( adcx, ch );
vol = 3.3*(float)adcValue/4096;
return vol;
}
/****************显示对应端口的电压值函数********************
* 显示,占三位
* adcx: 1表示ADC1; 2表示ADC2
* vol: 电压值
* PA0测量的电压显示与左边,PA1测量的电压值显示与右边
******************************************************/
void VoltageDisplay(u8 adcx, float vol)
{
u8 baiWei, shiWei, geWei;
baiWei = (u8)vol % 10;
shiWei = (u8)(vol*10)%10;
geWei = (u8)(vol*100)%10;
if( adcx==1 )
{
PortationDisplay(0, baiWei);
delay_ms(1);
SetLed(1, shiWei);
delay_ms(1);
SetLed(2, geWei);
delay_ms(1);
}
else if( adcx==2 )
{
PortationDisplay(5, baiWei);
delay_ms(1);
SetLed(6, shiWei);
delay_ms(1);
SetLed(7, geWei);
delay_ms(1);
}
}
/***************温度和光照ADC的初始化函数********************
* 初始化ADC1,通道14 15
******************************************************/
void TemperatureAndLightAdcInit(void)
{
//初始化IO口
RCC->APB2ENR |= 1<<4; //使能PORTC口时钟
GPIOA->CRL &= 0xff00ffff; //PC4 5 模拟输入
RCC->CFGR &= ~(3<<14); //分频因子清零
RCC->CFGR |= 2<<14; //6分频 SYSCLK/DIV2=12M ADC时钟设置为12M,ADC1最大时钟不能超过14M!
RCC->APB2ENR |= 1<<9; //ADC1时钟使能
RCC->APB2RSTR |= 1<<9; //ADC1复位
RCC->APB2RSTR &= ~(1<<9); //复位结束
ADC1->CR1 &= 0xf0ffff; //工作模式清零
ADC1->CR1 |= 0<<16; //独立工作模式
ADC1->CR1 &= ~(1<<8); //非扫描模式
ADC1->CR2 &= ~(1<<1); //单次转换模式
ADC1->CR2 &= ~(7<<17);
ADC1->CR2 |= 7<<17; //SWSTART:软件控制转换
ADC1->CR2 |= 1<<20; //使用外部触发(SWSTART),必须使用一个事件来触发
ADC1->CR2 &= ~(1<<11); //右对齐
ADC1->SQR1 &= ~(0xf<<20);
ADC1->SQR1 &= 0<<20; //1个转换在规则序列中,也就是只转换规则序列1
ADC1->SMPR1 &= 0xfffc0fff; //通道14,15采样时间清空
ADC1->SMPR1 |= 7<<12; //通道14 239.5周期,提高采用时间可以提高精确度
ADC1->SMPR1 |= 7<<15; //通道15 239.5周期,提高采用时间可以提高精确度
ADC1->CR2 |= 1<<0; //开启AD转换器
ADC1->CR2 |= 1<<3; //使能复位校准
while( ADC1->CR2 & 1<<3 )
; //等待校准结束
ADC1->CR2 |= 1<<2; //开启AD校准
while( ADC1->CR2 & 1<<2 )
; //等待校准结束
}
/***************获取温度的ADC的值函数********************
* 获取ADC1的ADC值
* ch为通道值
* 返回ADC1的ADC值
******************************************************/
u16 GetTemperatureAdc(u8 ch)
{
u16 adcValue = 0;
adcValue = GetAdc( 1,ch );
return adcValue;
}
/***************ADC值转换成温度值函数********************
* 通过ADC值计算温度值
* 返回温度值
******************************************************/
float GetTemperature( void )
{
u16 temperatureAdc = 0;
float temperature = 0.0;
temperatureAdc = GetTemperatureAdc( 15 ); //通道15注入的AD值
temperature = (float)temperatureAdc*(3.3/4096); //当前温度电压值
temperature = temperature *10000/(3.3-temperature)/1000; //温度电阻阻值
temperature = (float)1.0/( (float)log(temperature*1000/10000)/3950 + 1.0/(273.16+25) ) - 273.16; //计算温度
return temperature;
}
/***************光照强度的ADC值函数********************
* 光照强度的ADC值
* ch为通道值
* 返回光照的ADC值
******************************************************/
u16 GetLightAdc(u8 ch)
{
u16 adcValue = 0;
adcValue = GetAdc(1, ch);
return adcValue;
}
定时器与看门狗原理与程序设计
定时器分类
-
高级定时器
- TIME1
- TIME8
-
通用定时器
TIME2~5
-
基本定时器
- TIME6
- TIME7
-
看门狗定时器
- 独立看门狗(IWDG)
- 窗口看门狗(WWDG)
看门狗原理
- 看门狗定时器( WDT , Watch Dog Timer )是嵌人式的一个重要组成部分,它实际上是一个计数器。
- 一般给看门狗一个数字,程序开始运行后看门狗开始倒计数。
- 如果程序运行正常,过一段时间 CPU 应发出指令让看门狗复位,重新开始倒计数。(喂狗)
- 如果看门狗计数器倒数到0就认为程序没有正常工作,而强制复位系统。(狗叫)
- 看门狗定时器对嵌入式系统提供了独立的保护功能,当系统出现故障时,在可控的时钟周期内,看门狗将系统复位或将系统从休眠中唤醒。
- STM32的独立看门狗由内部专门的 40 kHz 低速时钟驱动,即使主时钟发生故障,它也仍然有效。
8_定时器_数字钟
main.c
/******************************定时中断实现数字钟************************
* 数字钟
* 通过控制定时中断实现数字钟
******************************************************************/
#include "timer.h"
/***************************主函数*****************************/
int main()
{
Stm32_Clock_Init( 6 );
delay_init( 72 );
TimerxInit( 9999,7199 ); 10Khz的计数频率,计数到10000表示1s
LED_Init();
LED_SEL = 0;
while(1)
{
DisplayDigitalClock();
}
}
timer.c
/****************定时器实现********************
*
* 作者:宁晓兰
***************************************************/
#include "timer.h"
//数字钟的时,分、秒
u8 hour = 0, minute = 0, second = 0;
/****************普通按键初始化函数********************
* 通用定时器中断初始化
* 这里时钟选择为APB1的2倍,而APB1为36M
* arr:自动重装值。
* psc:时钟预分频数
* 这里使用的是定时器3!
******************************************************/
void TimerxInit(u16 arr, u16 psc)
{
RCC->APB1ENR |= 1<<1; //TIM3(定时器3)时钟使能
TIM3->ARR = arr; //设定计数器自动重装值,10为1ms
TIM3->PSC = psc; //预分频器7200,得到10KHZ的计数时钟
TIM3->DIER |= 1<<0; //允许更新中断
TIM3->CR1 |= 0x01; //使能定时器3
MY_NVIC_Init(1, 3, TIM3_IRQChannel, 2); //抢占1,子优先级3,组2
}
/****************定时器3的中断函数********************
* 定时器3的中断函数
* 每次中断,second加一
******************************************************/
void TIM3_IRQHandler( void )
{
if( TIM3->SR & 0x0001) //溢出中断
{
second++;
if( second>59 )
{
second = 0;
minute++;
if( minute>59 )
{
minute = 0;
hour++;
if( hour>23 )
hour = 0;
}
}
}
TIM3->SR &= ~(1<<0); //清除中断标志位
}
/*****************************************************
* 数字钟显示函数
******************************************************/
void DisplayDigitalClock(void)
{
//从左到右
SetLed(0, hour/10);//小时的高位
delay_ms(1);
SetLed(1, hour%10);//小时的低位
delay_ms(1);
SetLed(2, 10);//0x40//显示-(中间水平段)
delay_ms(1);
SetLed(3, minute/10);
delay_ms(1);
SetLed(4, minute%10);
delay_ms(1);
SetLed(5, 10);
delay_ms(1);
SetLed(6, second/10);
delay_ms(1);
SetLed(7, second%10);
delay_ms(1);
}
第 5 章
μC/OS-II 嵌入式操作系统
概念
- μC/OS-II 是一种基于优先级的抢占式多任务实时操作系统内核,包含了实时内核、任务管理、时间管理、任务间通信同步(信号量,邮箱,消息队列)和内存管理等功能。它可以使各个任务独立工作,互不干涉,很容易实现准时而且无误执行,使实时应用程序的设计和扩展变得容易,使应用程序的设计过程大为减化。
- μC/OS-II绝大部分的代码是用ANSII的C语言编写的,包含一小部分汇编代码,使之可供不同架构的微处理器使用。从8位到64位,μC/OS-II已在超过40种不同架构上的微处理器上运行。
特点
- 公开源代码:µC/OS-II全部以源代码的方式提供给使用者(约5500行)。该源码清晰易读,结构协调,且注解详尽,组织有序;
- 可移植性(portable): µC/OS-II的源代码绝大部分是用移植性很强的ANSI C写的,与微处理器硬件相关的部分是用汇编语言写的。µC/OS-II可以移植到许许多多不同的微处理器上,条件是:该微处理器具有堆栈指针,具有CPU内部寄存器入栈、出栈指令,使用的C编译器必须支持内嵌汇编,或者该C语言可扩展和可链接汇编模块,使得关中断和开中断能在C语言程序中实现;
- 可固化(ROMable): µC/OS-II是为嵌入式应用而设计的,意味着只要具备合适的系列软件工具(C编译、汇编、链接以及下载/固化)就可以将µC/OS-II嵌入到产品中作为产品的一部分;
- 可裁剪(scalable): 可以只使用µC/OS-II中应用程序需要的系统服务。可裁减性是靠条件编译实现的,只需要在用户的应用程序中定义那些µC/OS-II中的功能应用程序需要的部分就可以了;
- 占先式 / 可抢占性(preemptive): µC/OS-II是完全可抢占型的实时内核,即µC/OS-II总是运行就绪条件下优先级最高的任务;
- 多任务: µC/OS-II可以管理64个任务(2.82版本以后增加到256个)。赋予每个任务的优先级必须是不相同的,这就是说µC/OS-II不支持时间片轮转调度法(该调度法适用于调度优先级平等的任务)
- 可确定性: 绝大多数µC/OS-II的函数调用和服务的执行时间具有可确定性。也就是说用户能知道µC/OS-II的函数调用与服务执行了多长时间。进而可以说,除了函数OSTimeTick()和某些事件标志服务,µC/OS-II系统服务的执行时间不依赖于用户应用程序任务数目的多少;
- 任务栈: 每个任务都有自己单独的栈。µC/OS-II允许每个任务有不同的栈空间,以便降低应用程序对RAM的需求;
- 系统服务: µC/OS-II提供许多系统服务,比如信号量、互斥信号量、事件标志、消息邮箱、消息队列、时间管理等等;
- 中断管理: 中断可以使正在执行的任务暂时挂起。如果优先级更高的任务被该中断唤醒,则高优先级的任务在中断嵌套全部退出后立即执行,中断嵌套层数可以达255层;
- 稳定性和可靠性: µC/OS-II的每一种功能、每一个函数以及每一行代码都经过了考验和测试,具有足够的安全性与稳定性,能用于与人性命攸关、安全性条件极为苛刻的系统中。
功能
- 实时内核
- 任务管理/任务调度
- 时间管理
- 任务间通信同步(信号量,邮箱,消息队列)
- 内存管理等
应用
μC/OS-II已经在世界范围内得到广泛应用,包括很多领域, 如手机、路由器、集线器、不间断电源、飞行器、医疗设备及工业控制上。
任务状态机
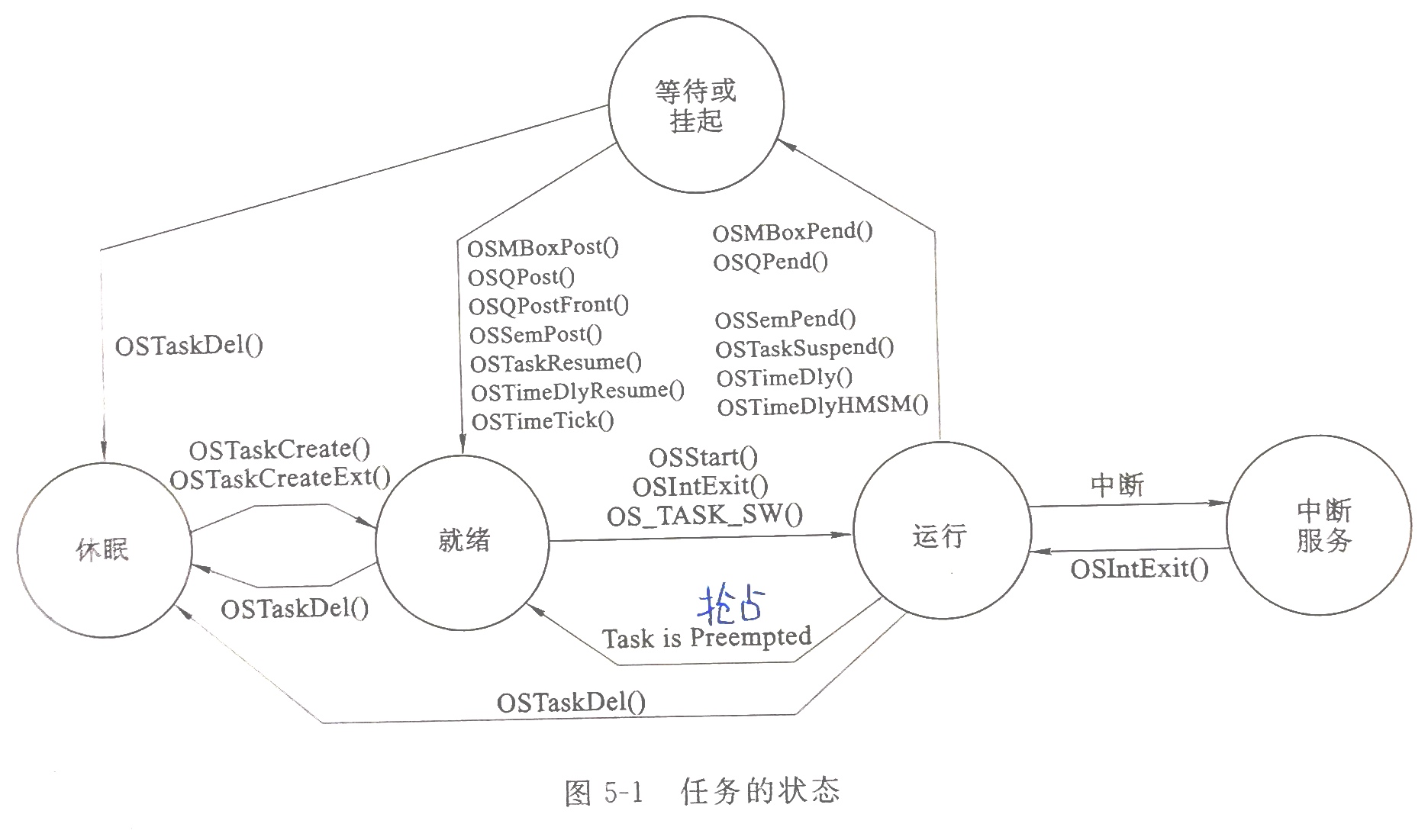
- 睡眠/睡眠状态:任务在没有被配备任务控制块或被剥夺了任务控制块时的状态
- 就绪状态:系统为任务配备了任务控制块且在任务就绪表中进行了就绪登记。
- 运行状态:处于就绪状态的任务经调度器判断获得了CPU的使用权。
- 中断服务状态:一个正在运行的任务响应中断申请,中止运行而去执行中断服务程序的状态
- 挂起/等待状态:正在运行的任务,需要等待一段时间或需要等待一个事件发生再运行时,该任务就会把CPU的使用权让给别的任务。
嵌入式系统发展的挑战与机遇
挑战
-
复杂性:随着嵌入式系统的功能越来越复杂,系统的设计、开发和测试也变得越来越困难。嵌入式系统需要支持多种功能和通信协议,同时还需要考虑功耗、安全、可靠性等因素,这使得系统的设计和开发变得更加复杂。
-
安全性:嵌入式系统通常需要处理敏感数据和控制重要设备,因此需要具备高度的安全性。嵌入式系统需要采用安全的通信协议和加密算法,以保护数据的机密性和完整性。同时,嵌入式系统还需要具备防护措施,以防止恶意攻击和非法访问。
-
资源限制:嵌入式系统通常具有资源限制,如处理器速度、存储容量和功耗等。这使得系统的设计和开发需要更加注重资源的优化和利用,以实现系统的高效运行和长时间的使用寿命。
机遇
可参考
chatGPT-3.5
-
物联网(IoT):随着物联网技术的发展,越来越多的设备和系统需要嵌入式系统来实现智能化和互联互通。嵌入式系统需要支持多种通信协议和网络连接方式,如 Wi-Fi、蓝牙、ZigBee、LoRa 等,以实现设备之间的数据交换和远程控制。
-
人工智能(AI):人工智能技术的发展为嵌入式系统带来了新的机遇和挑战。嵌入式系统需要支持高效的计算和数据处理能力,以实现机器学习、图像识别、语音识别等 AI 应用。
-
安全性:随着嵌入式系统的广泛应用,安全性问题也越来越受到关注。嵌入式系统需要具备安全性能,包括数据加密、身份认证、访问控制等功能,以保护系统和数据的安全。
-
低功耗:嵌入式系统通常需要长时间运行,因此需要具备低功耗的特点,以延长系统的使用寿命。嵌入式系统需要采用低功耗的处理器、传感器和通信模块,以及优化的电源管理技术,以实现长时间的运行和待机。
-
自动化:嵌入式系统需要支持自动化和智能化的特点,以提高系统的效率和可靠性。嵌入式系统需要具备自动化控制、自适应调节、故障检测和自我修复等功能,以实现自动化运行和维护。
嵌入式处理器的选型原则(根据需求,性能,成本,开发工具,已有资源)
文心一言
嵌入式处理器的选型原则通常包括以下几个方面:
- 系统需求:首先需要确定系统的需求,例如处理器的位数、主频、内存大小等。
- 性能:嵌入式处理器的性能是选择的重要因素,需要根据系统的要求进行选择。通常情况下,处理器的位数和主频越高,性能也就越高。
- 成本:成本也是选择处理器时需要考虑的因素,通常情况下,低成本的处理器适合于要求不高的应用场景,而高成本的处理器适合于要求高性能和稳定性的应用场景。
- 开发工具:开发工具对于嵌入式系统的开发至关重要,需要根据开发工具的要求进行选择。通常情况下,使用熟悉的开发工具可以提高开发效率,降低开发成本。
- 已有资源:已有资源也是选择处理器时需要考虑的因素,例如处理器的型号、供应商、竞争状况等。
在选择嵌入式处理器时,还需要考虑以下因素:
- 应用场景:不同的应用场景对处理器的要求不同,例如工业控制、医疗设备、物联网设备等,需要根据应用场景进行选择。
- 可靠性:对于要求高可靠性的应用场景,需要选择抗噪声能力强、返修率低的处理器。
- 安全性:对于一些安全性要求较高的应用场景,需要选择具有安全加密功能的处理器。
- 功耗:嵌入式设备通常需要长时间运行,因此需要选择功耗低、电池寿命长的处理器。
- 成本:在选择处理器时,还需要考虑处理器的成本,通常情况下,低成本的处理器适合于要求不高的应用场景,而高成本的处理器适合于要求高性能和稳定性的应用场景。
综上所述,嵌入式处理器的选型需要考虑多个因素,需要根据系统需求、性能、成本、开发工具和已有资源等因素进行选择。