文章目录
- 一、什么是CUBLAS
- CUBLAS实现矩阵乘法
- CUBLAS中的Leading Dimension
- CUBLAS LEVEL3函数 : 矩阵矩阵
- CUBLAS实现矩阵乘法
- 二、cuDNN
- 使用CuDNN实现卷积神经网络
- 四、CUBLAS和CUDNN实践
一、什么是CUBLAS
cuBLAS是BLAS的一个实现。BLAS是一个经典的线性代数库,他允许用户使用NVIDIA的GPU的计算资源。在使用cuBLAS的时候,应用程序应该分配矩阵或向量需要的GPU内存空间,并加载数据,调用所需要的cuBLAS函数,然后从GPU的内存空间上传计算结果到主机,cuBLAS API也提供了一些帮助函数来写或者从GPU中读取数据。
在使用cuBLAS的时候,cuBLAS使用的是列优先的数组,索引以1为基准。
相关头文件为 “cublas_v2.h”
其包含三类函数(向量标量,向量矩阵,矩阵矩阵)
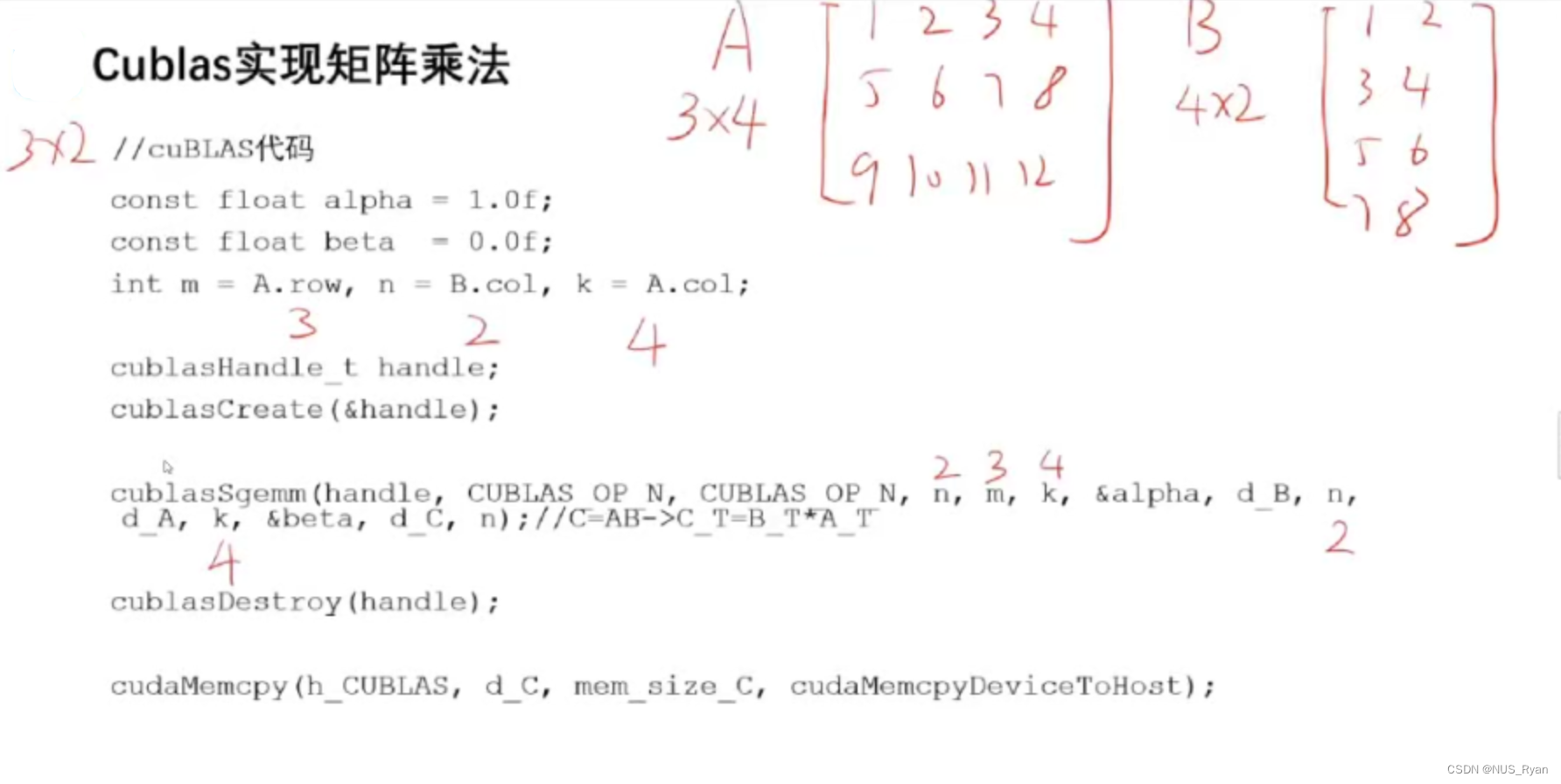
CUBLAS实现矩阵乘法
cublasHandle_t handle;
cublasCreate(&handle);
//调用计算函数
cublasSgemm(handle, CUBLAS_OP_N, CUBLAS_OP_N, m, n, k, &alpha, *B, n, *A, k, &beta, *C, n);
//销毁句柄
cublasDestroy(handle);
…//回收计算结果,顺序可以和销毁句柄互换
CUBLAS中的Leading Dimension
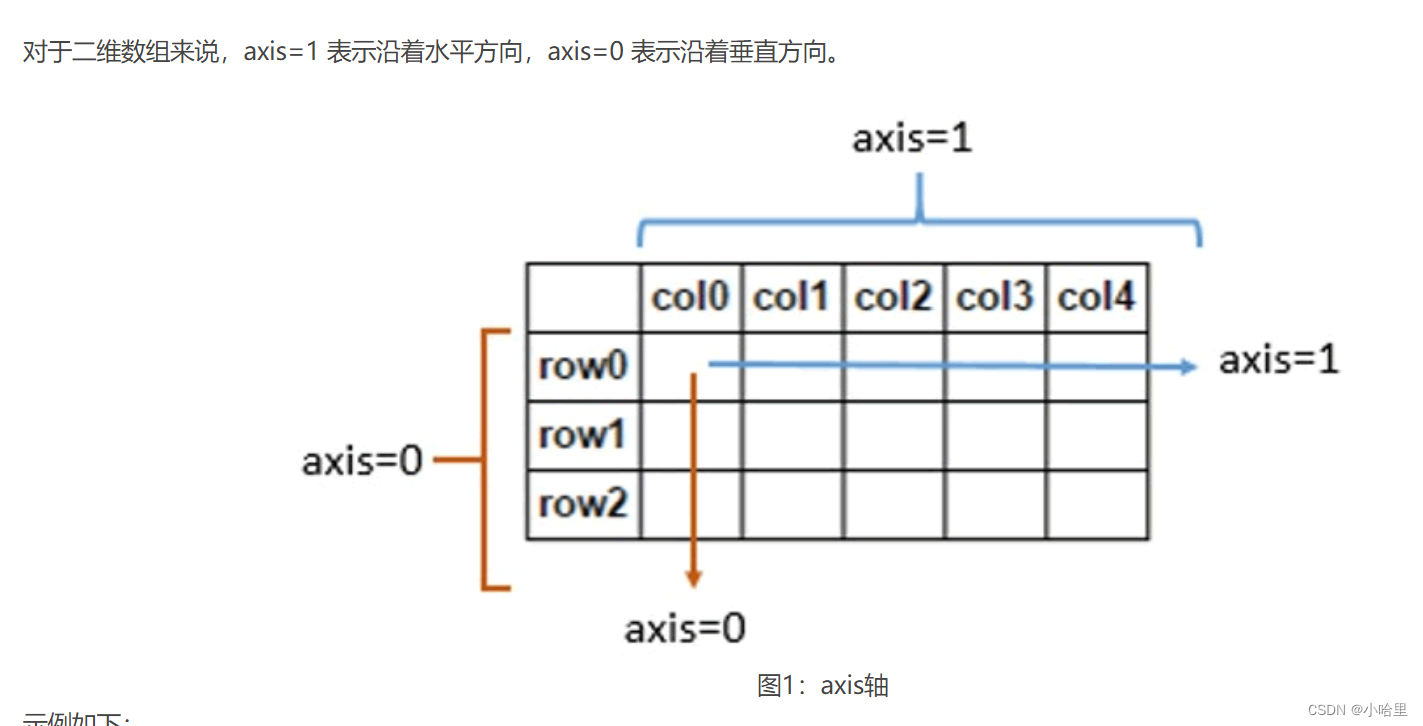
在CUBLAS中,矩阵可以以行主序(row-major order)或列主序(column-major order)存储。了解leading dimension对于理解CUBLAS函数的参数传递和性能优化至关重要。
对于二维矩阵,leading dimension是矩阵的行数(row-major order)或列数(column-major order)。
列主序(column-major order,也称为Fortran顺序):在这种顺序中,矩阵的列按连续内存地址存储。对于列主序矩阵,leading dimension是矩阵的行数。
例如,对于一个大小为MxN的列主序矩阵A,A(i, j)的内存位置可以通过以下计算得出:
location = i + j * M
其中i表示行索引,j表示列索引(从0开始)。
行主序(row-major order,也称为C顺序):在这种顺序中,矩阵的行按连续内存地址存储。对于行主序矩阵,leading dimension是矩阵的列数。
例如,对于一个大小为MxN的行主序矩阵A,A(i, j)的内存位置可以通过以下计算得出:
location = i * N + j
其中i表示行索引,j表示列索引(从0开始)。
在使用CUBLAS函数时,需要指定leading dimension,以便库可以正确解释矩阵数据。例如,在CUBLAS的cublasDgemm函数中,用于矩阵乘法的参数lda、ldb和ldc分别表示输入矩阵A、B和输出矩阵C的leading dimensions。
在实践中,CUBLAS主要使用列主序(Fortran顺序)存储矩阵。在调用CUBLAS函数时,请确保矩阵以正确的顺序存储,并正确设置leading dimension。
CUBLAS LEVEL3函数 : 矩阵矩阵
cublasStatus_t cublasSgemm(cublasHandle_t handle,
cublasOperation_t transa, cublasOperation_t transb,
int m, int n, int k,
const float *alpha, const float *A, int lda, const float *B, int ldb,
const float beta, floatC, int ldc) • 实现功能: C = alpha * op ( A ) * op ( B ) + beta * C
• 参数意义
• alpha和beta是标量, A B C是以列优先存储的矩阵
• 如果 transa的参数是CUBLAS_OP_N 则op(A) = A ,如果是CUBLAS_OP_T 则op(A)=A的转置
• 如果 transb的参数是CUBLAS_OP_N 则op(B) = B ,如果是CUBLAS_OP_T 则op(B)=B的转置
• Lda/Ldb:A/B的leading dimension,若转置按行优先,则leading dimension为A/B的列数
• Ldc:C的leading dimension,C矩阵一定按列优先,则leading dimension为C的行数
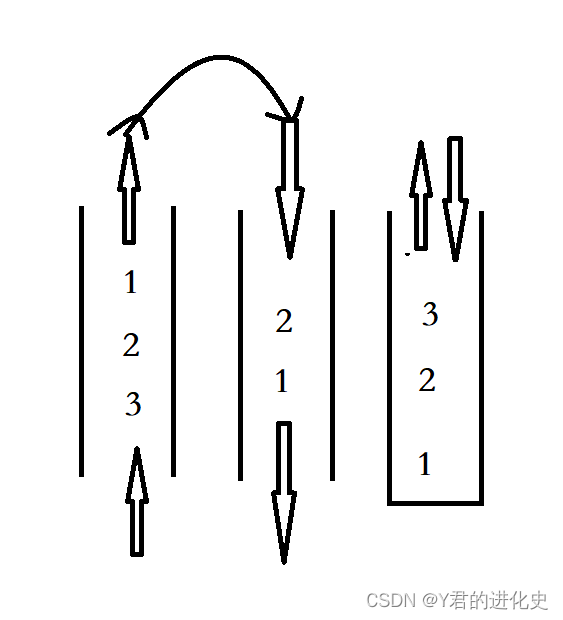
CUBLAS实现矩阵乘法
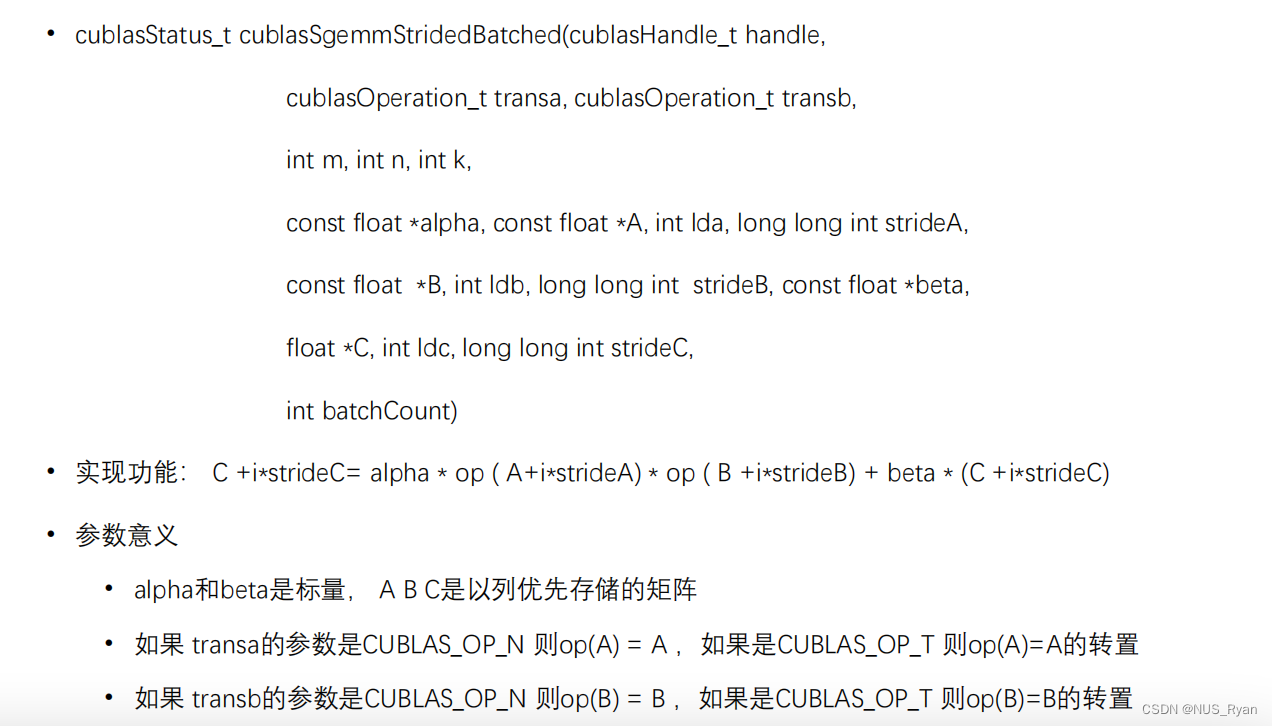
CUBLAS实现Batch版本矩阵乘法,如下图,最终结果是 [[c1,c2],[c3,c4]]矩阵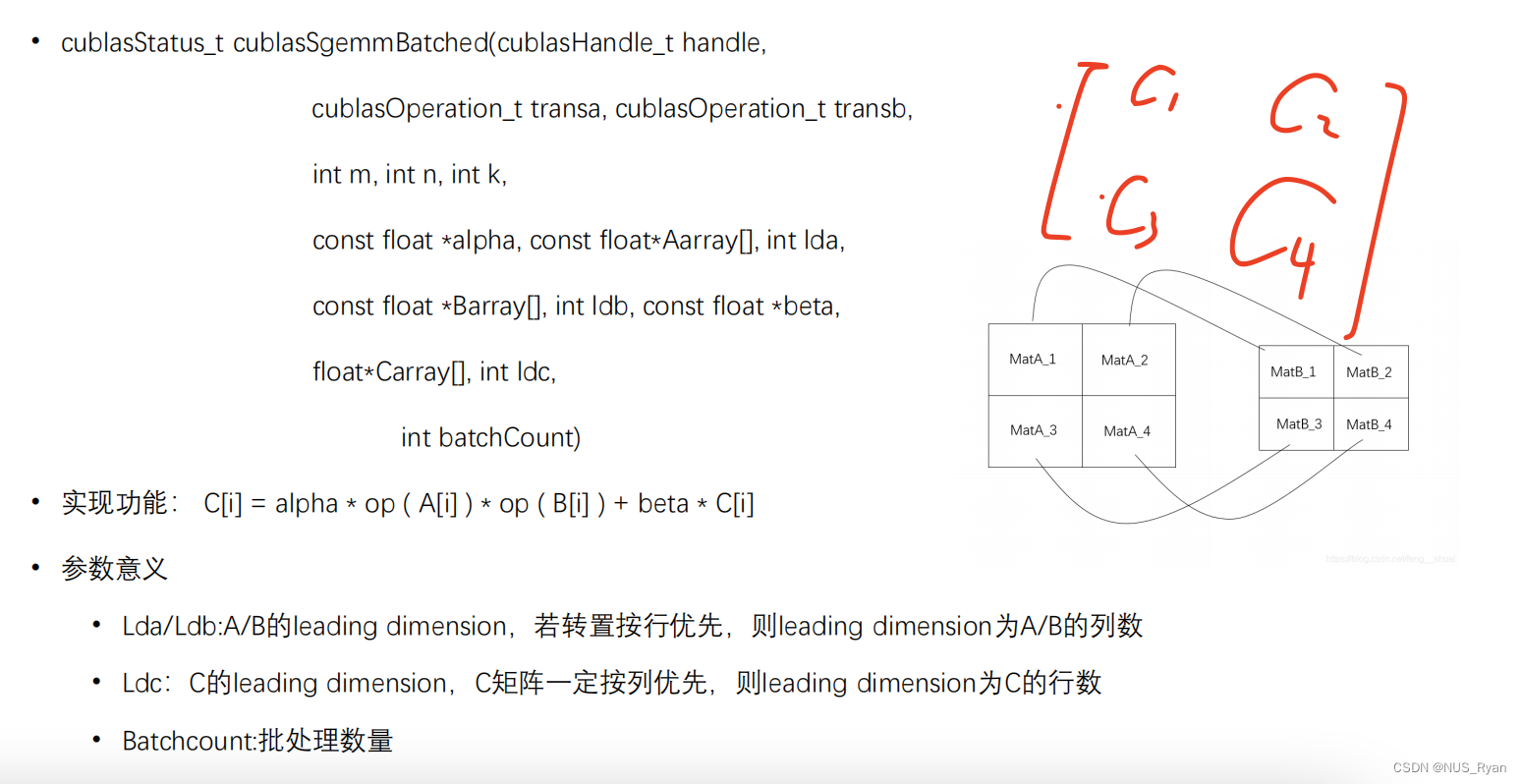
二、cuDNN
对于一些比较高级的算子,比如卷积算子,cudnn能够提供更加便捷的操作:
NVIDIA cuDNN是用于深度神经网络的GPU加速库。它强调性能、易用性和低内存开销
• NVIDIA cuDNN可以集成到更高级别的机器学习框架中
• 常用神经网络组件
• 常用语前向后向卷积网络
• 前像后向pooling
• 前向后向softmax
• 前向后向神经元激活
• Rectified linear (ReLU)、Hyperbolic tangent (TANH)
• Tensor transformation functions
• LRN, LCN and batch normalization forward and backward
• 头文件 include "cudnn.h“
• 学习网站: https://docs.nvidia.com/deeplearning/cudnn/
使用CuDNN实现卷积神经网络
创建cuDNN句柄
• cudnnStatus_t cudnnCreate(cudnnHandle_t *handle)
以Host方式调用在Device上运行的函数
• 比如卷积运算:cudnnConvolutionForward等
释放cuDNN句柄
• cudnnStatus_t cudnnDestroy(cudnnHandle_t handle)
将CUDA流设置&返回成cudnn句柄
• cudnnStatus_t cudnnSetStream(cudnnHandle_t handle, cudaStream_t streamId)
• cudnnStatus_t cudnnGetStream(cudnnHandle_t handle, cudaStream_t *streamId)
除此之外,cudnn还可以很方便地实现RNN,Softmax,Batch Normalization, ReLU, Sigmoid,Layer Normalization等等
四、CUBLAS和CUDNN实践
使用CUBLAS实现矩阵乘法:
#include<bits/stdc++.h>
#include "cublas_v2.h"
#include "cuda_runtime.h"
#include "device_launch_parameters.h"
using namespace std;
void checkResult(vector<double> h_C,vector<double> h_C_cpu){
double epsilon = 5;
bool match = 1;
for(size_t i = 0;i < h_C.size();i++){
if(abs(h_C[i] - h_C_cpu[i]) > epsilon){
match = 0;
cout<<"Arrays do not match!"<<endl;
cout<<"h_C["<<i<<"] = "<<h_C[i]<<", h_C_cpu["<<i<<"] = "<<h_C_cpu[i]<<endl;
break;
}
}
if(match) cout<<"Arrays match."<<endl;
}
vector<double> matrixMulOnHost(vector<double> &A,vector<double> &B,int n){
vector<double> C(n * n);
for(size_t i = 0;i < n;i++){
for(size_t j = 0;j < n;j++){
double sum = 0;
for(size_t k = 0;k < n;k++){
double a = A[i + k * n];
double b = B[k + n * j];
sum += a * b;
}
C[i + n * j] = sum;
}
}
return C;
}
int main(int argc,char *argv[]){
int n = atoi(argv[1]);
vector<double> h_A(n * n);
vector<double> h_B(n * n);
for(size_t i = 0;i< n ;i++){
for(size_t j = 0; j < n ; j++){
h_A[i + j * n] = static_cast<double>(rand()) / 100;
h_B[i + j * n] = static_cast<double>(rand()) / 100;
}
}
//Allocate Device Memory for matrix A and B and C
double *d_A,*d_B,*d_C;
cudaMalloc(&d_A,n * n * sizeof(double));
cudaMalloc(&d_B,n * n * sizeof(double));
cudaMalloc(&d_C,n * n * sizeof(double));
//copy matrix A and B from host to the device
cudaMemcpy(d_A,h_A.data(),n * n * sizeof(double),cudaMemcpyHostToDevice);
cudaMemcpy(d_B,h_B.data(),n * n * sizeof(double),cudaMemcpyHostToDevice);
//Create a CUBLAS handle
cublasHandle_t handle;
cublasCreate(&handle);
//Setup alpha and beta
double alpha = 1.0;
double beta = 0.0;
cudaEvent_t start,stop;
cudaEventCreate(&start);
cudaEventCreate(&stop);
cudaEventRecord(start,0);
//Perform matrix multiplication (d_C = alpha * d_A * d_B + beta * d_C) using CUBLAS
//d_A : [m,k], d_B : [k,n], d_C : [m,n]
cublasDgemm(
handle,
CUBLAS_OP_N, // No Transition
CUBLAS_OP_N, // No Transition
n, // m
n, // n
n, // k
&alpha, // alpha
d_A, // d_A
n, // lda
d_B, // d_B
n, // ldb
&beta, // beta
d_C, // d_C
n // ldc
);
//Allocate host memory for the result matrix C and copy it from device to host memory
cudaEventRecord(stop,0);
cudaEventSynchronize(stop);
float elapsedTime;
cudaEventElapsedTime(&elapsedTime,start,stop);
cout<<"Time taken for matrix multiplication of "<<n<<" * "<<n<<" matrix is "<<elapsedTime<<" ms"<<endl;
vector<double> h_C(n * n);
cudaMemcpy(h_C.data(),d_C,n * n * sizeof(double),cudaMemcpyDeviceToHost);
vector<double> h_C_host = matrixMulOnHost(h_A,h_B,n);
checkResult(h_C,h_C_host);
//Free device memory
cudaFree(d_A);
cudaFree(d_B);
cudaFree(d_C);
//Destroy the CUBLAS handle
cublasDestroy(handle);
return 0;
}
这段代码的运行结果是:
Time taken for matrix multiplication of 1024 * 1024 matrix is 5.38173 ms

![[笔记]Python计算机视觉编程《一》 基本的图像操作和处理](https://img-blog.csdnimg.cn/edfadadc826d42c3addc46b5e9403fc3.png)