目录
- 一、VESC驱动轮毂电机
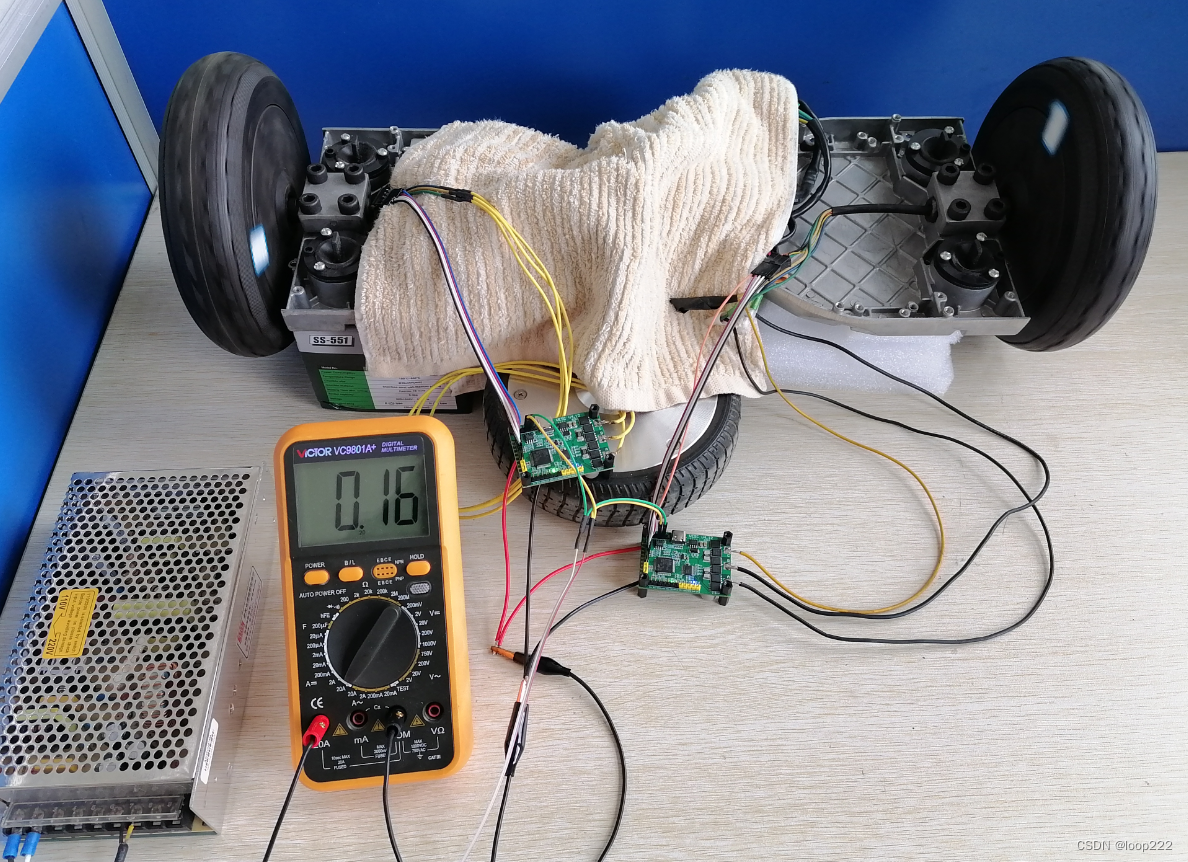
- 1.1、硬件准备
- 1.2、硬件接线
- 1.3、校准电机
- 1.4、主操作界面
- 二、CAN通信
- 2.1、硬件连接
- 2.2、代码说明
- 2.3、发送指令
- 三、双轮毂电机
- 3.1、校准第二个电机参数
- 3.2、硬件连接
- 3.3、CAN总线发送指令
- 四、把VESC做为USB转CAN模块
ODrive、VESC和SimpleFOC 教程链接汇总:请点击
一、VESC驱动轮毂电机
1.1、硬件准备
| 序号 | 名称 | 数量 |
|---|---|---|
| 1 | VESC4 | 1 |
| 2 | 8寸轮毂电机 | 1 |
| 3 | 36V电源 | 1 |
| 4 | USB延长线 | 1 |


1.2、硬件接线

1.3、校准电机
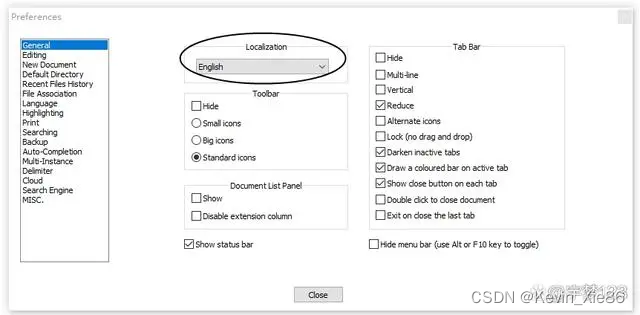
打开 vesc_tool_3.00 ,这个版本与5.02的固件版本最匹配。




校准大概需要1分钟,校准后的参数每次都有误差,不必大惊小怪。
注意 VESC ID 是随机的,CAN通信会使用这个ID,下图:

上一步,点击“OK”后等待5秒钟,切换到如下界面:
点击“Fwd”电机向前转动,点击“Rev”电机向后转动。Finish。

1.4、主操作界面
1.4.1、键盘控制
左右键控制电机以较低的速度正反转动,上下键控制电机以较高的速度正反转。
轮毂电机不能使用上下键控制,大概是设置速度太高电机容易报错。
注意图中的速度单位是ERPM,对于15对极的轮毂电机,1000ERPM = 66.7RPM = 1.1圈/秒。

1.4.2、直接设置目标速度
不用键盘控制,还可以左下角直接设置速度

1.4.3、设置爬升率
没有爬升率的情况下,电机启停都比较突然,体验非常不好。找到爬升率的设置,下图:

找到代码中的爬升率判断,下图:

VESC中会限制电机的最小速度,修改了限制后,虽然可以设置更小的速度,但是电机有抖动,尝试修改了PID,作用不大,电机齿槽效应导致的抖动,PID无能为力。
只是对比键盘控制电机启停非常丝滑,但输入目标速度的方式,启停有时就非常不流畅。
PID应该还可以再优化。

二、CAN通信
2.1、硬件连接

2.2、代码说明
VESC和ODrive的CAN通信类似,都只有简单的指令,大部分操作都需要通过USB事先配置好。
VESC的CAN波特率默认500K,默认使能,接线既可使用,不需要任何配置。
下图代码的枚举可以看出,设置速度的指令是“3”。两外四个状态 “STATUS” 会在上电主动上传,

2.3、发送指令
CAN通信的ID就是校准结束后的VESC ID,下图:

如果没有保存校准结果,还可以在这里查看,下图:

VESC的CAN ID是 “指令+ID” 的格式,下图:

电机反转,发送指令,下图:

三、双轮毂电机
一个VESC只能接一个电机,所以需要两个VESC,利用CAN总线控制。
3.1、校准第二个电机参数
这个 VESC ID 是1,其它参数与第一个略有误差,请无视。

3.2、硬件连接
can盒的位置需要接入120Ω电阻,vesc1和vesc2可以不接入电阻。

3.3、CAN总线发送指令
3.3.1、canable发送指令
VESC需要每隔1000ms发送一次指令,而CANable一次只能发送一个指令,所以不能实现两个电机同时转动。

3.3.2、ESP32发送指令
要想让两个电机同时转动,需要在1000ms内连续发送两个指令,手工操作CAN盒的方式肯定达不到。只能通过代码的方式,而能够在最短的时间内实现这个功能的代码,非arduino莫属。
技术细节,请点击这篇文章:ESP32的CAN通信。



四、把VESC做为USB转CAN模块
这是研究VESC的CAN通信时的意外收获,


VESC3记得接入120Ω电阻,

这样接的问题是一次也只能发送一个指令,与CANable的功能和毛病完全一样。
(完)