论文信息
题目:
NICER-SLAM:Neural Implicit Scene Encoding for RGB SLAM
NICER-SLAM: RGB SLAM的神经隐式场景编码
论文地址:
https://arxiv.org/pdf/2302.03594.pdf
发表期刊:
Computer Vision and Pattern Recognition (cs.CV)
标签
xxxx
摘要
近年来,神经隐式表征在同时定位与映射(SLAM)中得到了广泛的应用,特别是在密集视觉SLAM中。然而,之前在这方面的工作要么依赖于RGB-D传感器,要么需要单独的单目SLAM方法进行相机跟踪,并且不能产生高保真的密集3D场景重建结构。在本文中,我们提出了NICER-SLAM,这是一个密集的RGB SLAM系统,同时优化了凸轮时代姿势和分层神经隐式地图表示,这也允许高质量的新视图合成。为了促进映射的优化过程,我们集成了额外的监督信号,包括易于获得的单眼几何线索和光流,并且还引入了简单的扭曲损失来进一步加强基因组尝试一致性。此外,为了进一步提高复杂室内场景的性能,我们还提出了一种局部自适应转换,从体绘制方程中的符号距离函数(sdf)到密度。在合成数据集和真实数据集上,我们展示了密集映射、跟踪和新颖视图合成方面的强大性能,甚至可以与最近的RGB-D SLAM系统相媲美。
内容简介
我们做出了以下贡献:
•我们提出了NICER-SLAM,这是第一个密集的RGB SLAM之一,可对跟踪和映射进行端到端优化,这也允许高质量的新视图合成。
•我们引入了SDF表示的分层神经隐式编码,不同的几何和运动正则化,以及局部自适应的SDF体积密度变换。、
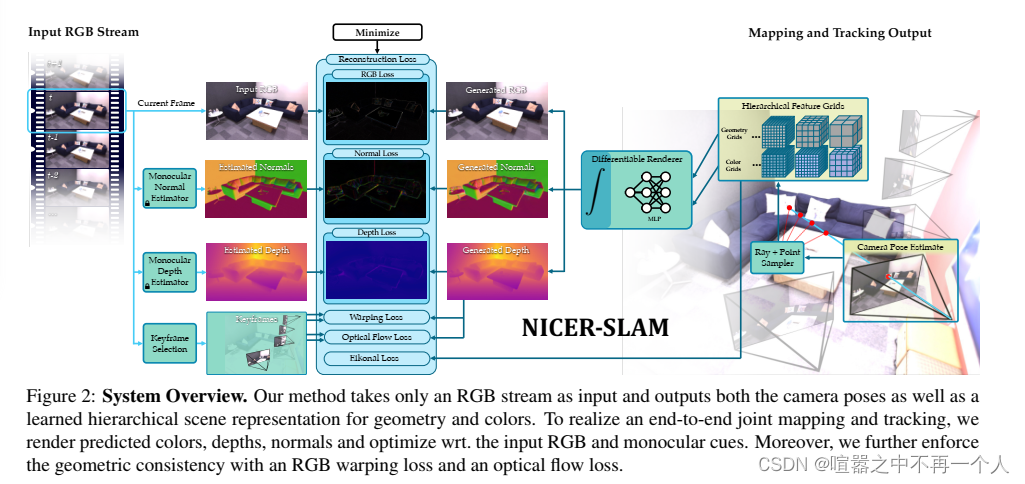
我们在图2中提供了NICER-SLAM管道的概述。给定RGB视频作为输入,我们同时估计准确的3D场景几何和颜色,以及通过端到端优化的摄像机跟踪。我们使用分层神经隐式表示来表示场景几何和外观(第3.1节)。使用类似nerf的可微分体渲染,我们可以渲染每个像素的颜色,深度和法线值(第3.2节),这将用于相机姿势,场景几何和颜色的端到端连接优化(第3.3节)。最后我们讨论了在我们的系统中所做的一些设计选择(第3.4节)。
评价
该分析来自于chatgpt4
本文提出了一种名为NICER-SLAM的新型密集RGB SLAM系统,该系统能同时优化相机位姿和分层神经隐式地图表示,并允许进行高质量的新视图合成。文章的主要创新点包括:
- 采用分层神经隐式编码进行SDF(有符号距离函数)表示,以获取详细的3D重建和高保真渲染。
- 在仅使用RGB输入的情况下,通过集成易于获取的单目几何线索、光流信息以及引入一个简单的扭曲损失以进一步加强几何一致性,优化神经隐式地图表示。
- 为适应室内场景的连续输入,提出了一种局部自适应的SDF到密度的变换。
实验结果表明,NICER-SLAM在映射、跟踪和新视图合成方面表现出色,甚至与最近的RGB-D SLAM方法相媲美。然而,该方法目前还无法实现实时性能,同时也没有闭环检测。
针对您的研究方向(动态场景下的SLAM问题),可以考虑以下创新点:
- 将NICER-SLAM与动态场景检测和跟踪算法结合,以便在处理动态场景时能够识别和处理运动物体。
- 探索在动态环境下使用神经隐式编码表示场景结构的可能性,包括对运动物体的建模。
- 优化NICER-SLAM的实时性能,以便在实际应用中处理动态环境。
- 尝试引入闭环检测机制,提高动态环境下SLAM系统的鲁棒性。
阅读总结
没看懂,只知道是属于稠密建图的一类