【基于Ubuntu18.04+Melodic的realsense D435安装】
- 1. RealSense SDK安装
- 1.1 克隆SDK
- 1. 2 安装相关依赖
- 1.3 安装权限脚本
- 1. 4 进行编译与安装
- 1.5 测试安装是否成功
- 2. D435i 安装ROS接口
- 2.1 方法一realsense—ros源码
- 2.2 方法二安装相机库
- 3. 总结
1. RealSense SDK安装
系统硬件环境
系统:Ubuntu 18.04+ ROS melodic
设备:Realsense D435i+USB3.2 TypeC数据线
备注:由于相机数据量较大,保证数据传输的稳定性,务必采用USB3.0以上的TypeC数据线,否则普通数据线会卡帧。
1.1 克隆SDK
标号1的第一章节下面都是在一个终端中完成!
ctrl+alt+t打开终端
先克隆IntelRealSense SDK源码,新建librealsense文件夹
git clone https://github.com/IntelRealSense/librealsense
cd librealsense
1. 2 安装相关依赖
在原先的终端下,分别输入以下命令完成相关依赖的安装。
sudo apt-get install libudev-dev pkg-config libgtk-3-dev
sudo apt-get install libusb-1.0-0-dev pkg-config
sudo apt-get install libglfw3-dev
sudo apt-get install libssl-dev
1.3 安装权限脚本
在原先的终端下,分别输入以下命令安装对应权限脚本
sudo cp config/99-realsense-libusb.rules /etc/udev/rules.d/
sudo udevadm control --reload-rules && udevadm trigger
1. 4 进行编译与安装
在原先的终端下,执行以下命令实现编译与安装
mkdir build
cd build
cmake ../ -DBUILD_EXAMPLES=true
make
sudo make install
1.5 测试安装是否成功
下面二选一
- 打开原先的终端,在终端中输入以下命令验证相机驱动是否安装成功
cd ~
cd librealsense/build/examples/capture
./rs-capture
- 或直接使用realsense-viewer工具查看效果:
realsense-viewer

到这里就完成SDK安装!
2. D435i 安装ROS接口
先安装一下
sudo apt-get install ros-melodic-rgbd-launch
然后下面方法二选一
2.1 方法一realsense—ros源码
这里新建进入在~/realsense_ws/src目录下
mkdir realsense_ws/src
cd realsense_ws/src
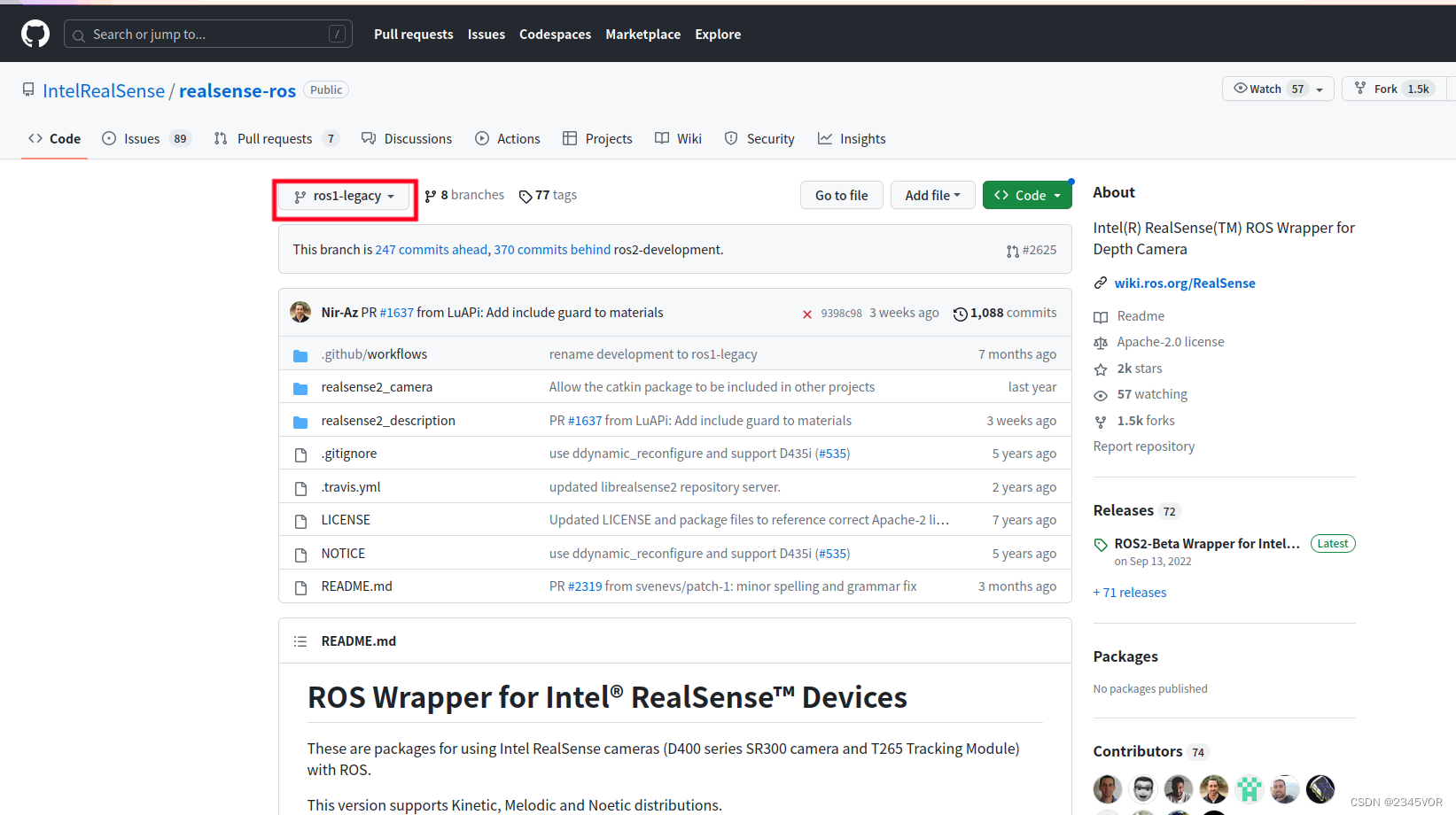
然后直接进入官网仓库地址:https://github.com/IntelRealSense/realsense-ros/tree/ros1-legacy
需要下载分支ros1-legacy
 从github下载相关的包,然后进行编译:
从github下载相关的包,然后进行编译:
git clone -b ros1-legacy https://github.com/IntelRealSense/realsense-ros.git
git clone https://github.com/pal-robotics/ddynamic_reconfigure.git
cd ~/realsense_ws && catkin_make
编译完成后,使用如下命令测试:
编译、然后更新一下source ~/.bashrc
echo "source ~/realsense_ws/devel/setup.bash" >> ~/.bashrc
source ~/.bashrc
检查摄像头是否正常连接,命令测试
roslaunch realsense2_camera demo_pointcloud.launch
#点云deemo
rqt_image_view
#rqt查看图像
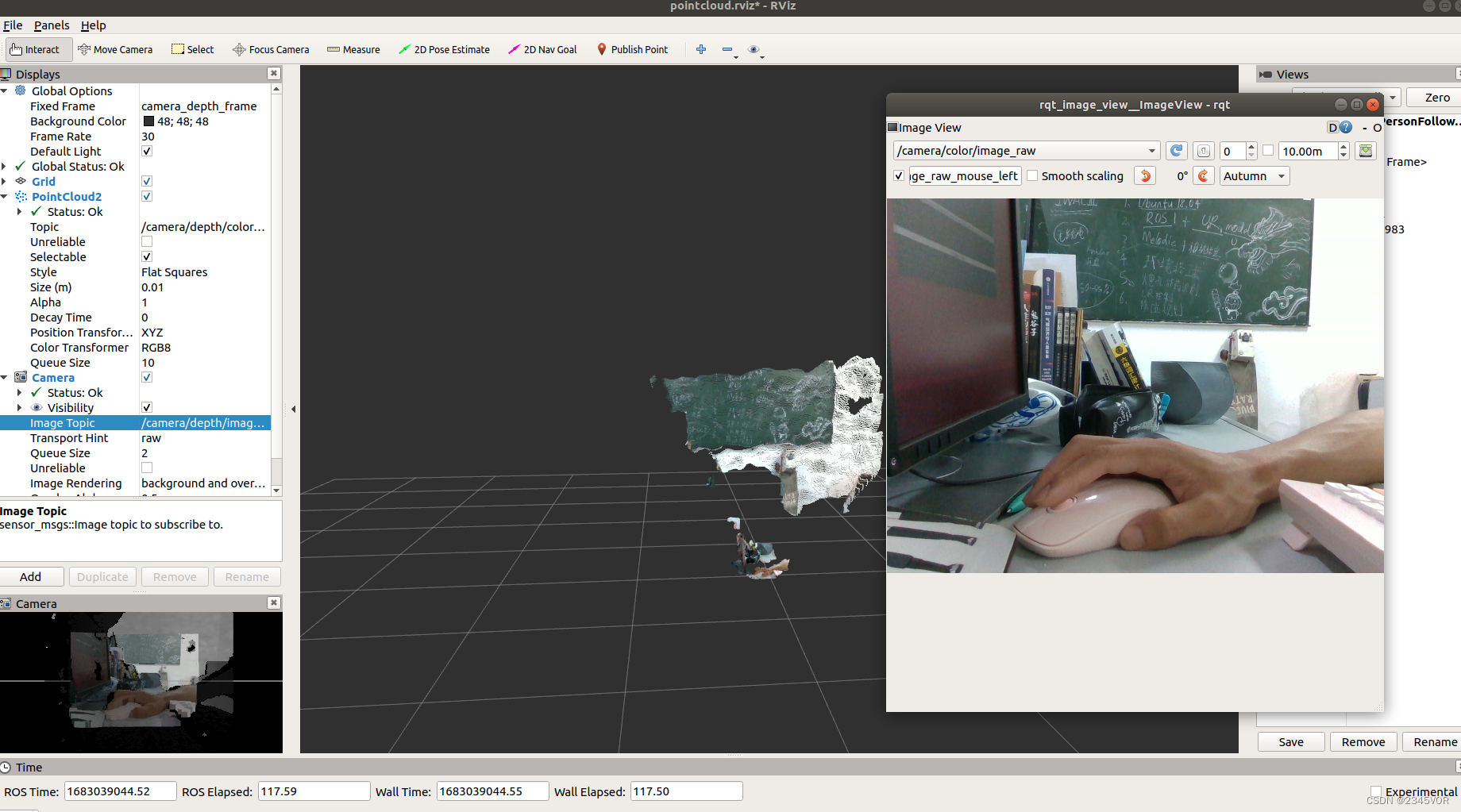
即可启动RealSense的ROS节点。
2.2 方法二安装相机库
安装相机realsense2-camera,realsense2-description库,
sudo apt install ros-noetic-realsense2-camera
sudo apt install ros-noetic-realsense2-description
移除apt方法二的包
sudo apt-get --purge remove
sudo apt-get --purge remove ros-melodic-realsense2-camera
sudo apt-get --purge remove ros-melodic-librealsense2
sudo apt-get --purge remove ros-melodic-realsense2-description
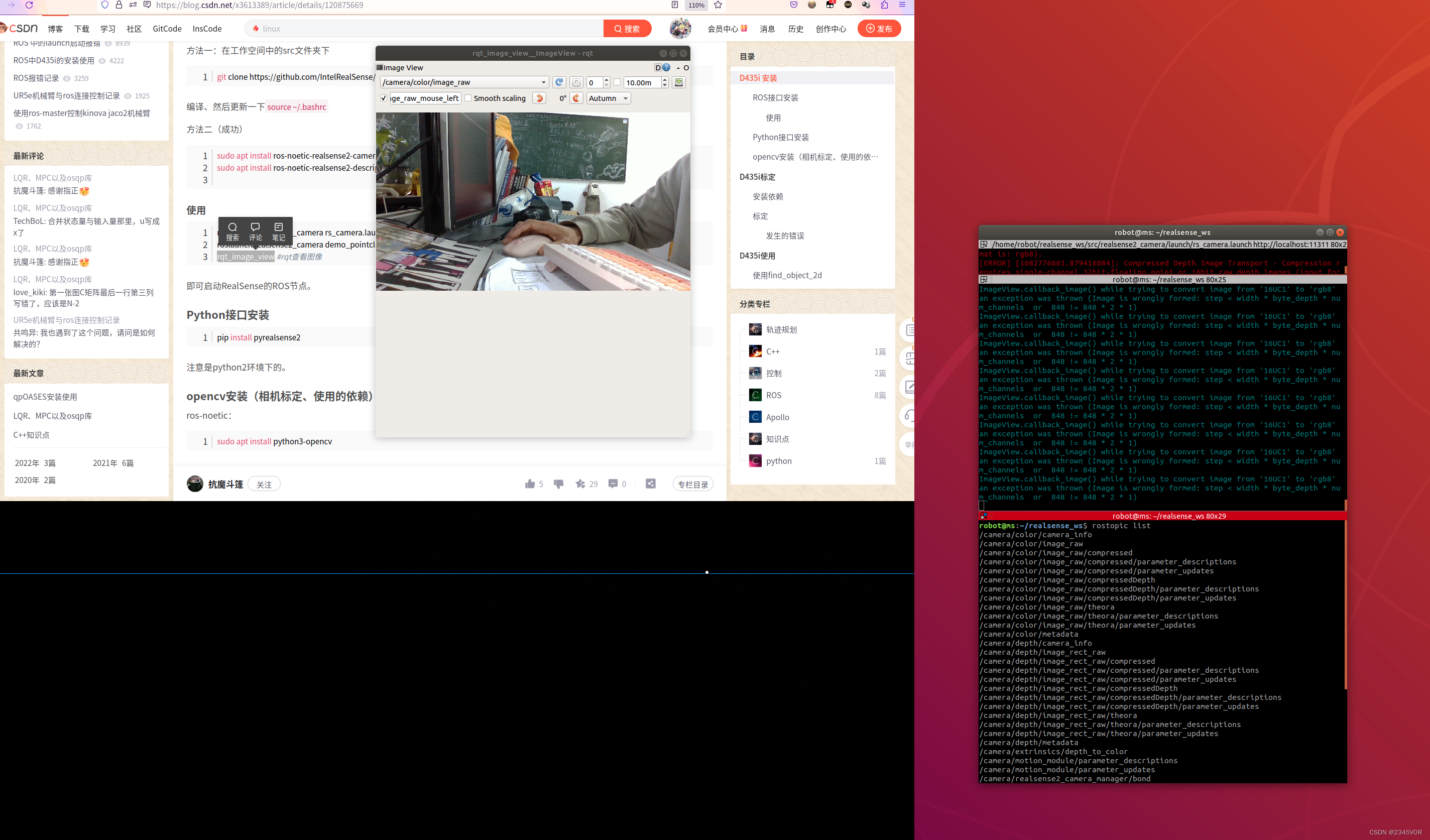
使用
roslaunch realsense2_camera rs_camera.launch
#启动相机
roslaunch realsense2_camera demo_pointcloud.launch
#点云deemo
rqt_image_view
#rqt查看图像
即可启动RealSense的ROS节点。
3. 总结
基于Ubuntu18.04+Melodic的realsense D435安装,首先SDK安装,后面给出两个安装realsense-ros,期待你的关注,后期我会持续更新
ROS中D435i的安装使用



![P1915 [NOI2010] 成长快乐](https://img-blog.csdnimg.cn/a164f63cd9ac4a71acf90885c53b1857.png)