集成电路的持续发展推动了信息技术的进步
。
步进扫描式光刻机是集成电路装备中
技术难度最高
、
价格最昂贵的关键设备
。
其中
,
精密运动台是光刻机最为核心的子系统之一
,
高速
、
高加速和高精度的要求对控制方法的研究和应用提出了挑战
。
文中对集成电路光刻机
中精密运动台的控制方法进行了综述
。
首先
,
介绍了面向光刻机工件台或掩模台单一运动台
的前馈反馈复合控制方法
;
其次
,
介绍了工件台和掩模台的同步控制方法
;
最后
,
介绍了运动台
的主动减振控制方法
。
0
引 言
集成
电
路
(
IntegratedCircuit
,
IC
)
领域
的不
断发展
,
为信息时代的技术进步提供了坚
实基
础
。
依据
IC
行
业
的摩尔定律
,
IC
集成
度大
约每
3
年 提高
4
倍
。
这离不开众多
IC
装
备起到的关键支 撑作用
,
尤其是
光
刻
机
,
是
IC
装
备中技术难
度
最 高、
价格最昂贵的核心设备
。
对
于
世界上最
高
端 的步进扫描式光
刻
机
,
目 前
仅
有
荷 兰
ASML
公 司、
日本
Nikon
公司和
Canon
公司
能
够量产
,
并 垄断了高
端
光
刻
机
市场
。
光
刻
机
内部结构如图
1
所示
。
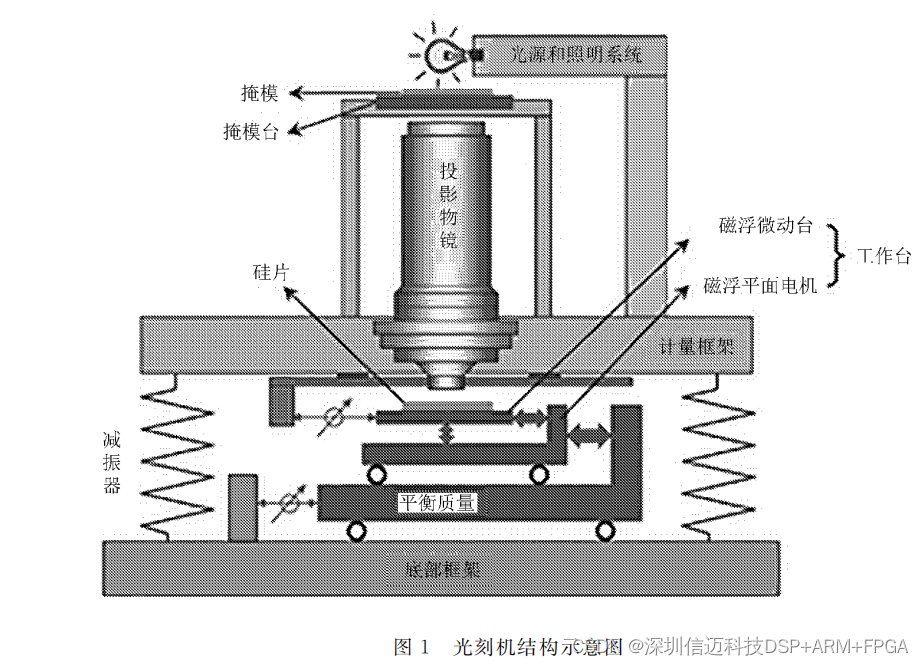
光
刻
机
主要由
光
源和照明
系
统
、
投影物镜
系 统和运动
台
系
统
等
分
系
统组成
。
其中
,
运
动
台
系
统是
光
刻
机
最为核心的分
系
统之一
,
依据功
能
可 分为承载掩模的掩模台和承载硅片的工
件台两部
分
。
光
刻
机
运
动
台
系
统是
光机电
一体化的产物
。
工
件台模型如图
2
所示
。
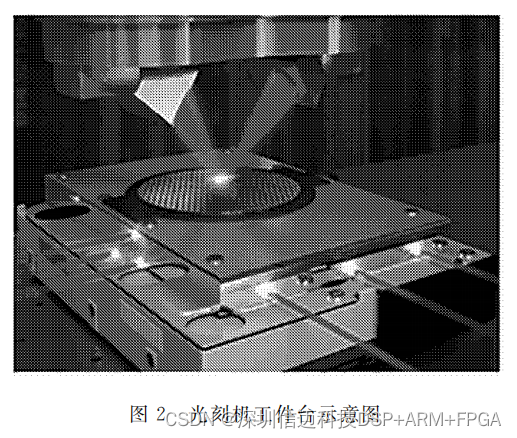
工
件台由粗
动
和
微动
两部分组成
,
并且使用亚纳米级精度的激光干涉仪作为位移传感器,使
用精密
运
动
控
制
技术可
实
现亚
纳
米级运
动精度
。
在
光
刻
机
的扫描曝
光
过
程
中
,
光
线通过照明系统照射到画
有电
路图形的掩模上
,
掩模台和
工
件台沿事先规划的运
动
轨迹加速运
动
到曝
光
位置,
在
高
速运
动
的同时把掩模的图形通过投影物
镜曝
光
在涂
有光
刻胶的硅片上
,
完成一个曝
光
场 的曝光
。
然
后
工
件台移
动
到下一个曝
光
场
,
重复
上述曝
光动
作
,
直到完成整个硅片上所
有
场的扫 描曝光
。
在
光
刻过
程
中
,
需要对运
动
台
系
统进行
精密
运
动
控
制
,
才
能
在所
有
曝
光
场
实
现快速且
精 密的曝
光
。
在
光
刻
机
中
,
由
于
曝
光
过
程
是在
高
速运
动
中 完成的,
其扫描和定位
精度
直接影响曝
光
的成像
质量和套刻
精度
,
因而要求扫描和定位
精度
要达 到纳
米级
。
此外
,
运
动
轨迹的加速
度
和速
度
直接
影响着
光
刻
机
产率
,
因此对运
动
台加速
度
和速
度等运
动
指标
有
极
高
要求
。
通常
,
高
速
、
高
加速和
高
精度
三者是相互矛盾的
,
同时追求运
动
指标和
精度指标
,
提升
光
刻
机
的曝
光
质量和产率极
具挑战
性
,
也 对
精 密
运
动
控
制
方 法 提 出 了 更
高
的 要 求
。
1
前馈和反馈结合的复合控制
1
.
1
两自由度控制结构
光
刻
机
运
动
台
系
统 是 多 输 入 多 输 出 (Multiple-InputMultiple
-
Output
,
MIMO
)
系
统
, 在进行高精度
运
动
控
制
时
,
首先需要对多个物理
轴和逻辑轴进行解耦
,
将其转换为若干个单输入 单输 出 (
Single-InputSingle-Output
,
SISO
)
系 统,
然
后对每个运
动自
由
度
的控
制器
进行独立设 计。
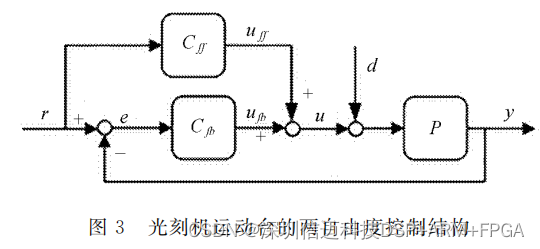
对
于
每个运
动自
由
度
普遍采
用前
馈
与
反馈结 合的两
自
由
度复合
控
制
方法
,
其控
制
结构如图
3 所示。
两
自
由
度
控
制
结构包含一个反馈控
制器
C
fb 和一个前
馈控
制器
C
ff
。
前
馈控
制器具有超前
特
性
,
可以利
用
参考轨迹的
已
知信息
实
现运
动
台对 运动
指令的快速跟踪
,
改善
动
态响
应
,
缩短稳定时 间。
反馈控
制器
是
基于
跟踪误差设计的
,
其
目
的 是稳定运动
台
系
统
,
并提供扰
动
抑
制能
力及鲁棒 性。
1
.
2
迭代学习控制
在典型的
前
馈控
制
技术中
,
光
刻
机
运
动
台被控对象的逆模型被用于
构建
前
馈控
制器
。