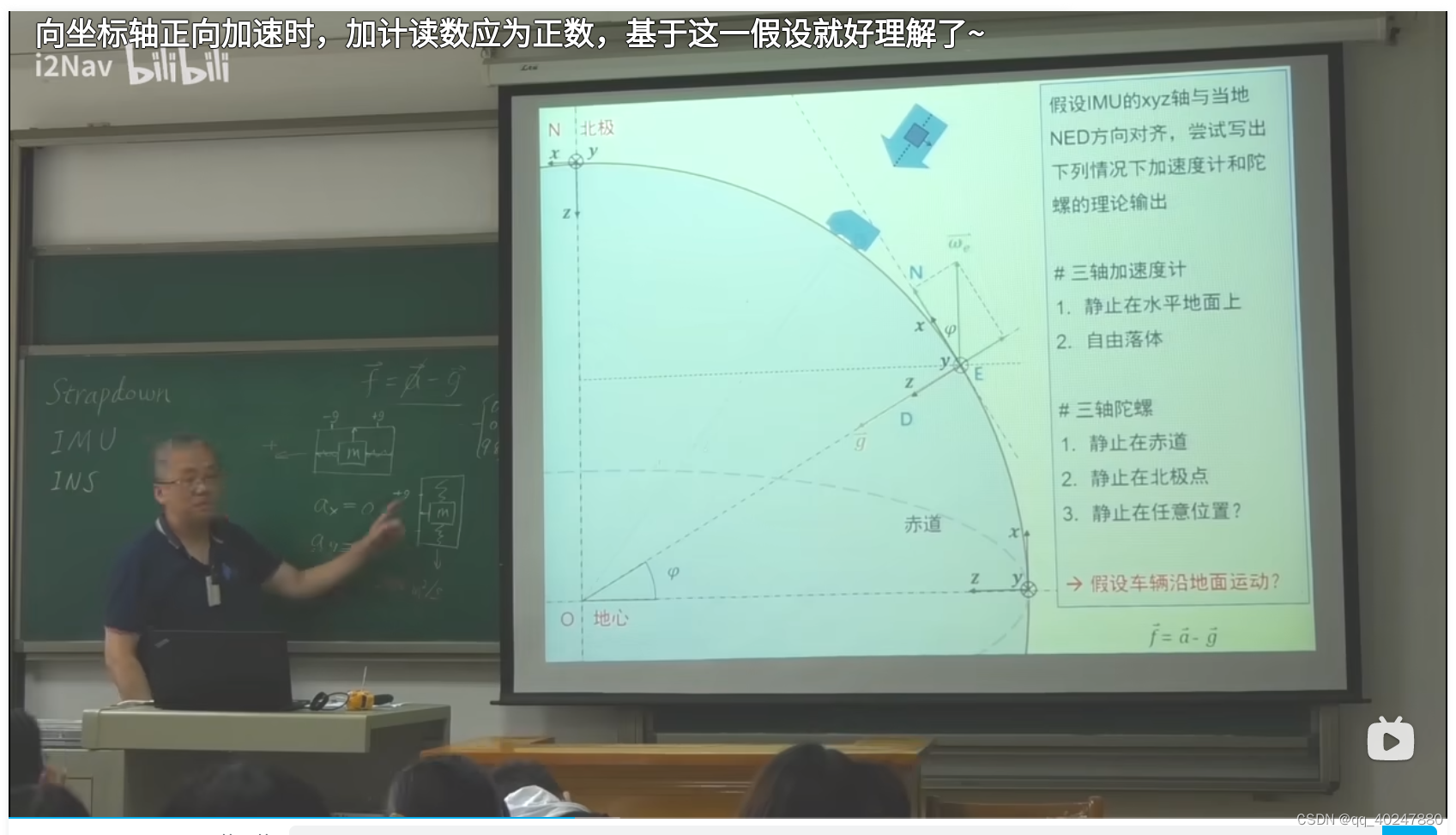
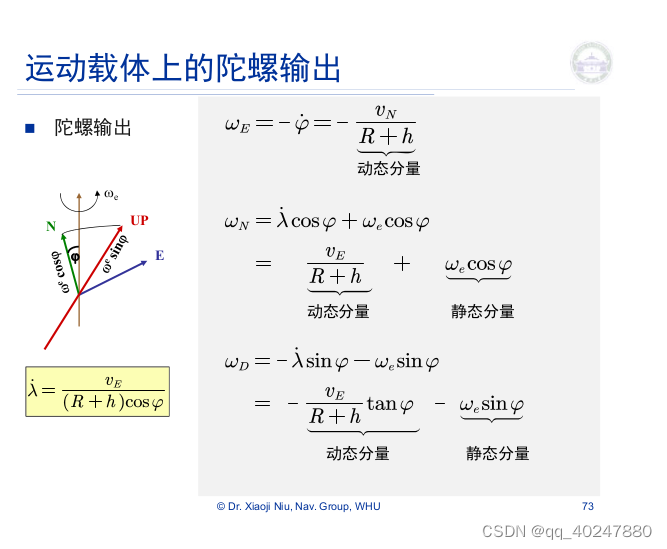
前提平台惯导NED与本地对齐,body系和navigation对齐。地表IMU感受到的是 朝天上的力【0,0,-9.8】和 赤道的【15deg/hr,0,0】或者北极 【0,0,-15deg/hr】或者【15cos纬度,0,-15sin纬度】,因为参考惯性系是地球球心,加上引力场的惯性要保持垂直向下的9.8加速度,为了克服这种惯性所以受到了一个支撑的外力 。沿着经线向北跑起来,【15cos纬度,-V/(R+H),-15sin纬度】。东向运动纬度【15cos纬度,-V/(R+H)cos纬度,-15sin纬度】。赤道线的速度约465.1 m/s x cos纬度,静态分量比较大。

比例因子有误差,但是比静态太小了,不再细化。
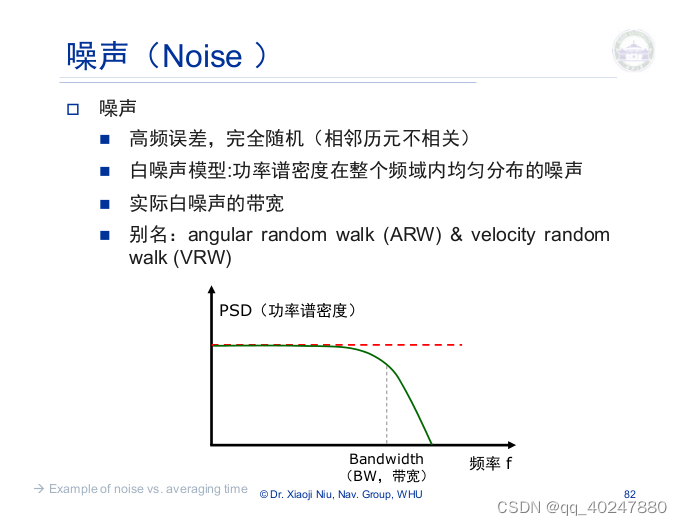
是噪声还是偏置取决于时间,时间缩小,噪声也会变成偏置。理想白噪声是无限带宽的不存在的,有限带宽白噪声模型适用于传感器带宽比最大功率谱密度对应频率还小的传感器,传感器采样的频率范围内全是满功率。因为色带全有所以叫白噪声。白噪声积分变成随机游走。
 v
v
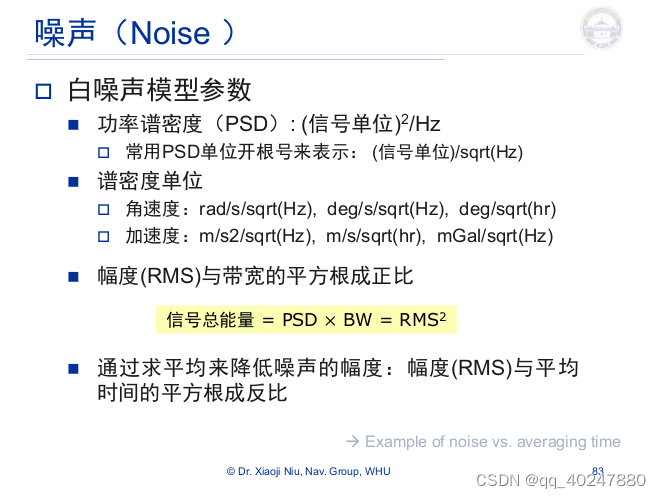
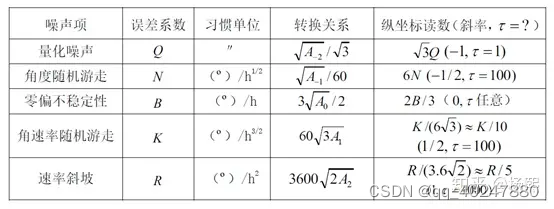
(rad/s)/sqrt(hz)=(180deg/pi)/s/sqrt(HZ)=((180deg/pi)/s)/sqrt(1/s)=(180deg/pi)/sqrt(s)=(180deg/pi)/sqrt(hr/3600),mGal=1cm/s2。。一、能量信号和功率信号。根据高中物理知识我们知道:当电阻为R、电流为I、电压为V时,则电信号的瞬时功率为:P=UI=I2R=U2/R在对能量进行分析时我们假定电阻为1,所以我们可以知道电压的平方或电流的平方等于功率。若信号的电压或者电流随时间变化,那么可以表示为时间t的函数f(t),那么能量E应该是瞬时功率的积分:若上述积分存在,那么就称为能量有限信号,简称能量信号。能量有限信号是指能量有限且不为0,而平均功率为0的信号。对于一些能量不可积的无限信号而言,无法用其能量来描述,此时就需要用功率来描述这种信号。功率指该信号在整个时间域内的能量积累对时间的平均。在现实中,信号都具有有限的功率、有限的持续时间,所以能量是有限的。但是若信号的持续时间足够长,我们可以将其视为无限长的时间,那么信号就具有有限的功率和无限的能量,我们把这种信号称为功率信号。所以,能量信号和功率信号分别为:能量信号:能量为一个有限正值,且平均功率为0。功率信号:平均功率为一个有限正值,且能量无穷。所以一个信号可以既不是能量信号也不是功率信号,但是不可以同时是能量信号和功率信号(平均功率为0和平均功率为有限正值冲突)。

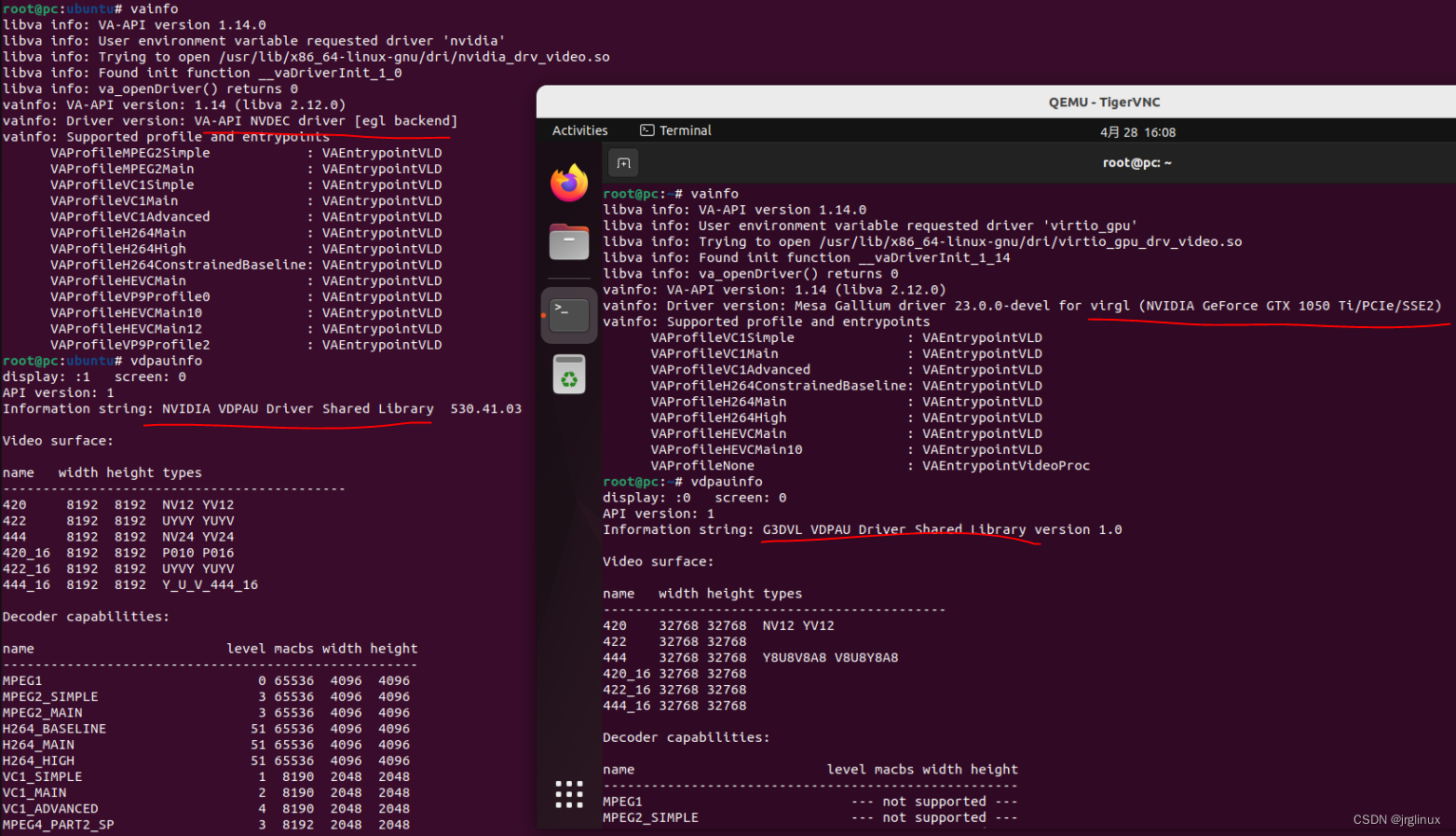
IMU测量值角速度,加速度积分后的值发散速度只和PSD相关。坏厂商添加底通滤波器降低带宽,减小信号总能量,降低RMS噪声幅度,实际PSD没变,并且会滤掉有用的真实的高频信号。 传感器BW要大于白噪声带宽。IMU静止时由于测量值应该为常数0HZ,用低通滤波器甚至求平均可以减少RMS幅度。
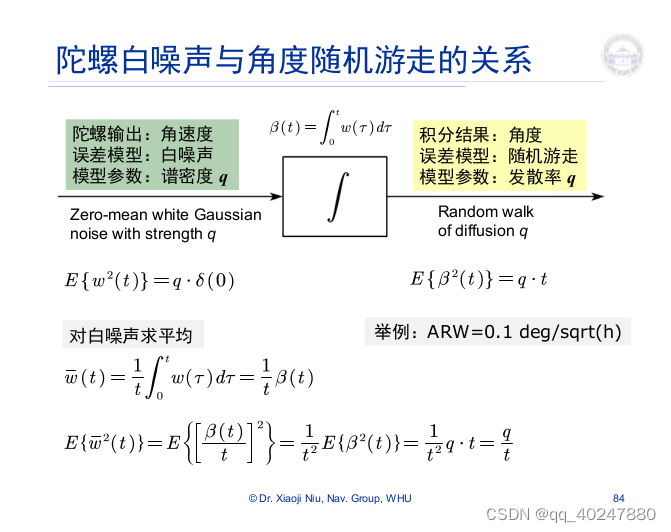
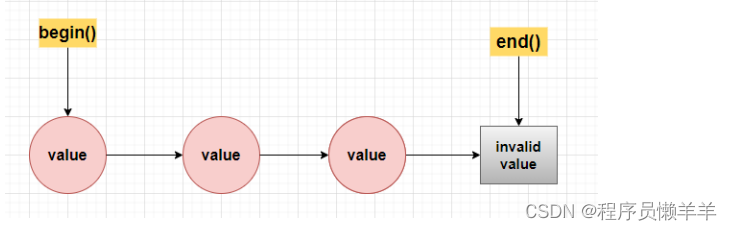
左边中间为狄拉克函数,x=0y=无穷,其他为0,积分为1,冲击函数。δ函数有时可看作是在原点处无限高、无限细,但是总面积为1的一个尖峰,在物理上代表了理想化的质点或点电荷的密度。[4]在信号处理上,δ函数常称为单位脉冲符号或单位脉冲函数。右边的E随着时间线性发散。
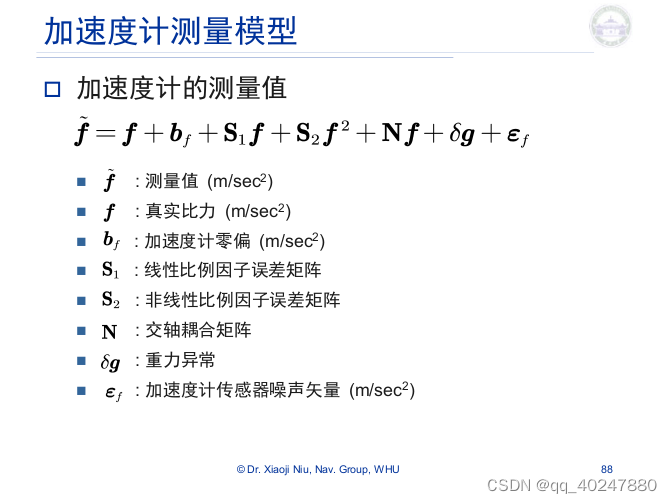
量程大容易非线性+建模错误导致重力异常但是改动IMU值比较方便
P-P:±3,RMS:±1。。没有error的代表的意思是带有error的
在随机理论中,把在某时刻的事件受在这之前事件的影响,其影响范围有限的随机过程,称为马尔可夫过程。一个事件受在它之前的事件的影响的深远程度,通常用在它之前的事件作为条件的概率来表达。受前一个事件的影响,简称为马尔可夫过程;受前两个事件的影响,称为二阶马尔可夫过程;受前三个事件的影响,称为三阶马尔可夫过程,由两个参数决定发散程度,而随机游走是一个参数决定。一个常数,不知道具体是那个就是随机常数,知道是那个就是常数。
功率谱密度无法精细体现低频信号。

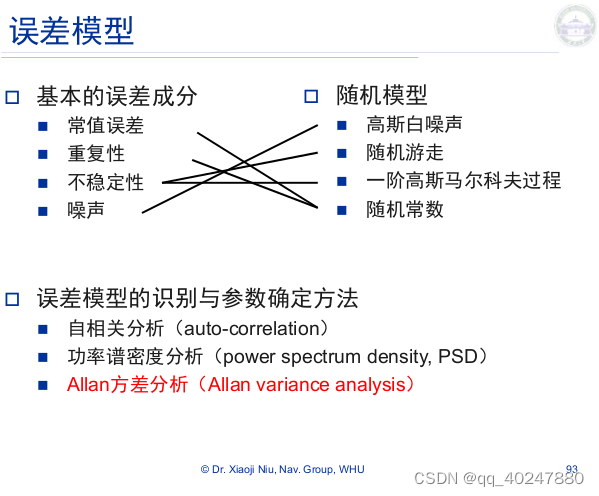
白噪声,幅度(RMS)与平均时间的平方根成反比,间隔时间提高幅度减小,平方根所以是-1/2。一阶高斯马尔科夫就是correlated noise。周期性东西,如交流电就出现sinusoldal。bais instability 闪烁噪声0。发散误差随机游走+1/2,线性发散+1。量化噪声,ADC位数不够。途中位宽高频下降因为有底通滤波器。
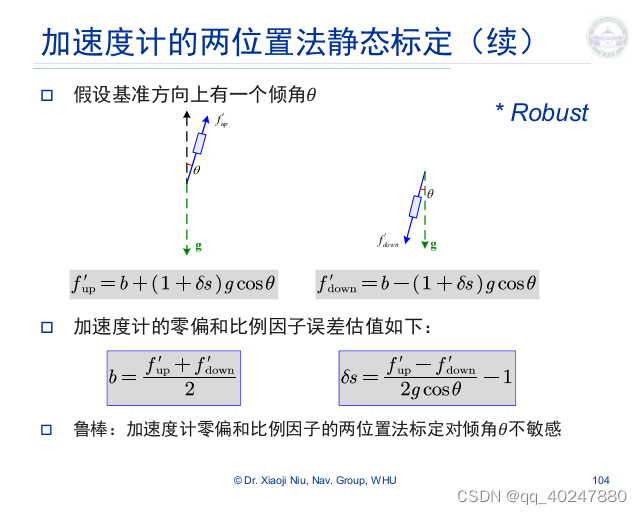
偏角比较小,
cos1deg=0.99984769515
cos2deg=0.99939082701
cos3deg=0.99862953475
cos4deg=0.99756405026
cos5deg=0.99619469809
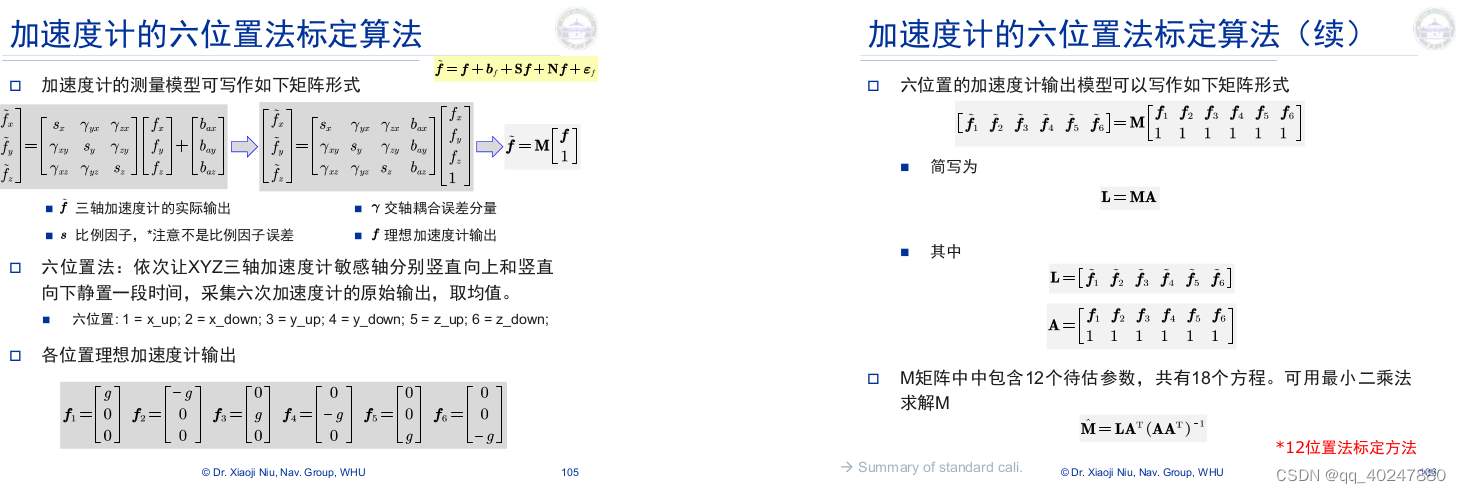
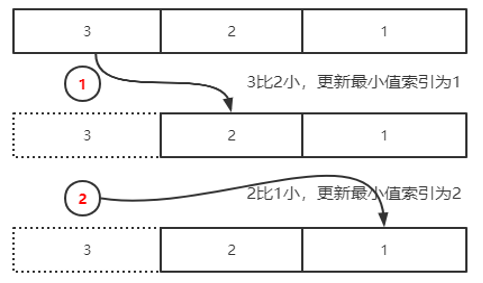
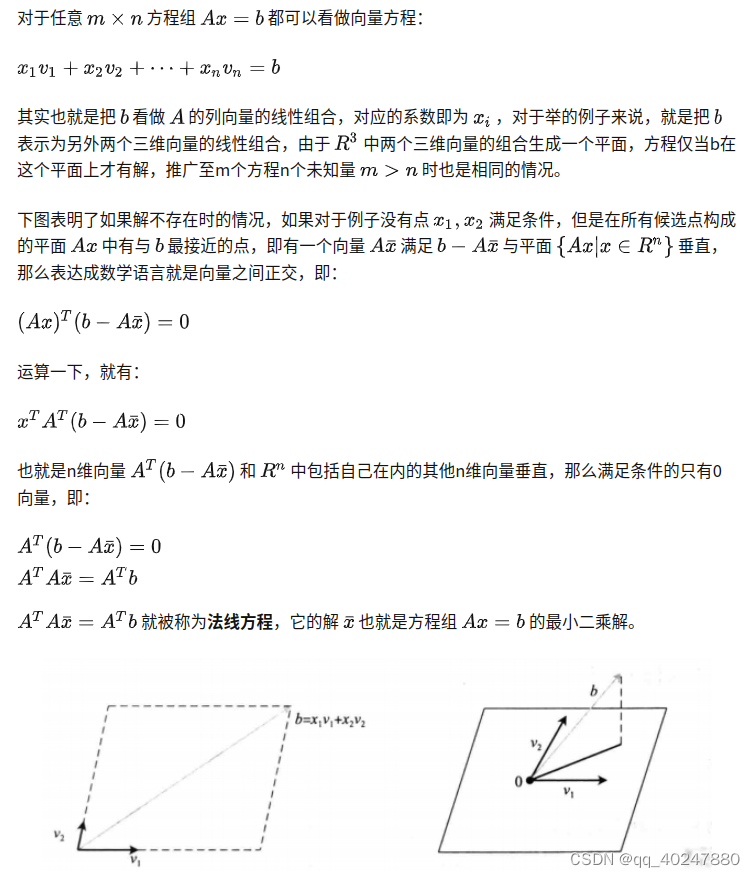
最小二乘
加速度标定当然还有十二位置法,就是当没有一个较理想的水平面放置传感器时,就可以一个朝向,旋转180测两次,求平均作为这个面的最终测量值,以此抵消放置面倾斜引起的干扰

地球自转有影响但不能直接测太小了。(地球自转的角速度大约是每小时15度,战术级;线速度度的余弦,而赤道线的速度约465.1 m/s。)陀螺仪标定时转台正反转减小轴线不水平误差,可以买控制转动角度的转台代替昂贵(大三倍,进口200w,国产100w)的固定角速度转台。上图就是参考角度为转台设定值,带上标的是陀螺仪输出量。正转和反转时间控制一样,启动前结束后再停止记录,多截取一点误差不大。陀螺的六位置法无法知道地球自转对imu的载体坐标系投影数值(除非知道IMU的z轴向上每时每刻的XY的航向角),加速度计保持水平就可以知道真值。所以尺度因子和零偏可以通过单轴二面法获取,交轴耦合无法获取


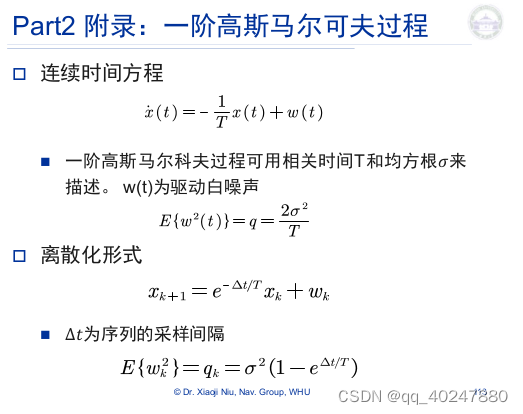
均方根大,发散范围大。相关时间大,发散慢,导数趋向于白噪声,积分变成随机游走。






![PMP项目管理-[第七章]成本管理](https://img-blog.csdnimg.cn/72d9489038834c85a1f391d955e66125.png)