论文:https://arxiv.org/pdf/2010.03045.pdf
本文提出了可以有效解决跨维度交互的triplet attention。相较于以往的注意力方法,主要有两个优点:
1.可以忽略的计算开销
2.强调了多维交互而不降低维度的重要性,因此消除了通道和权重之间的间接对应。
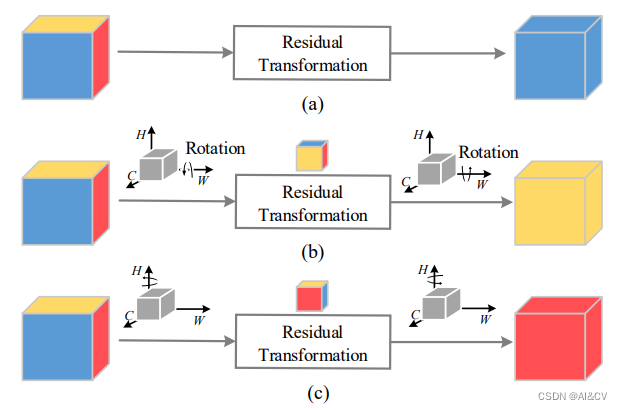
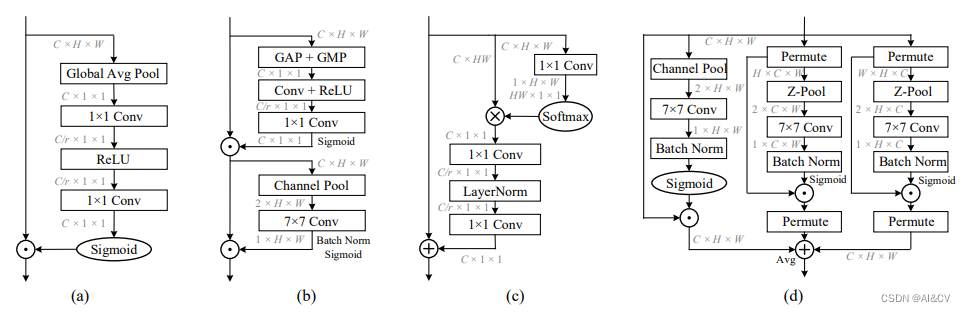
传统的计算通道注意力的方法为了计算这些通道的权值,输入张量在空间上通过全局平均池化分解为一个像素。这导致了空间信息的大量丢失,因此在单像素通道上计算注意力时,通道维数和空间维数之间的相互依赖性也不存在。后面提出基于Spatial和Channel的CBAM模型缓解了空间相互依赖的问题,但是通道注意和空间注意是分离的,计算是相互独立的。基于建立空间注意力的方法,本文提出了跨维度交互作用(cross dimension interaction)的概念,通过捕捉空间维度和输入张量通道维度之间的交互作用,解决了这一问题。
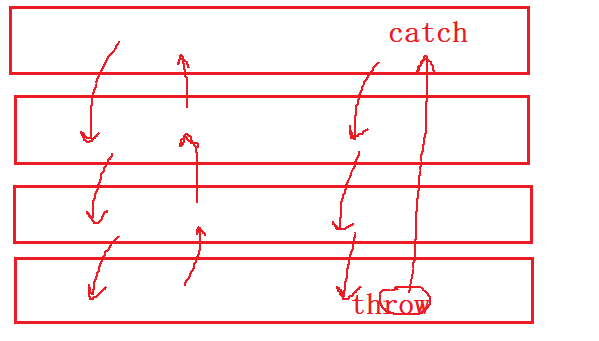
所提出的Triplet Attention如下图所示,Triplet Attention由3个平行的Branch组成,其中两个负责捕获通道C和空间H或W之间的跨维交互。最后一个Branch类似于CBAM,用于构建Spatial Attention,最终3个Branch的输出使用平均求和。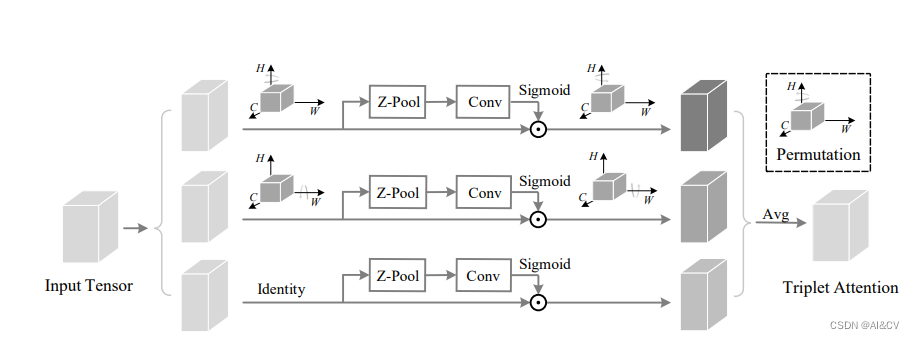
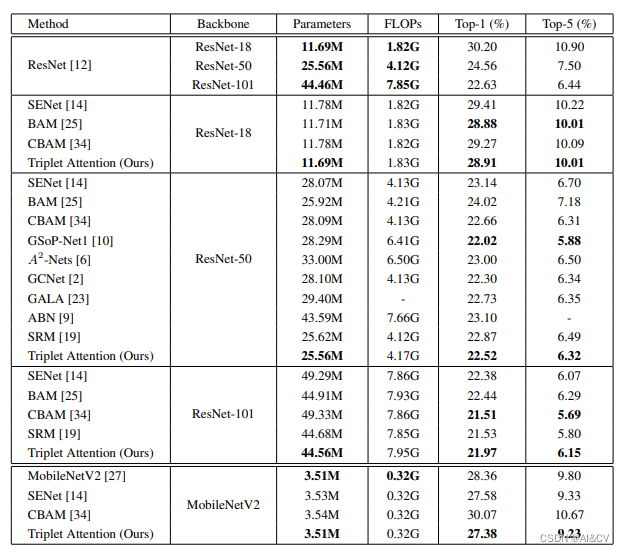
效果优于CBAM、SE
2.Triplet加入Yolov8
2.1Triple加入modules.py
###################### TripletAttention #### start by AI&CV ###############################
class BasicConv(nn.Module): #https://arxiv.org/pdf/2010.03045.pdf
def __init__(self, in_planes, out_planes, kernel_size, stride=1, padding=0, dilation=1, groups=1, relu=True,
bn=True, bias=False):
super(BasicConv, self).__init__()
self.out_channels = out_planes
self.conv = nn.Conv2d(in_planes, out_planes, kernel_size=kernel_size, stride=stride, padding=padding,
dilation=dilation, groups=groups, bias=bias)
self.bn = nn.BatchNorm2d(out_planes, eps=1e-5, momentum=0.01, affine=True) if bn else None
self.relu = nn.ReLU() if relu else None
def forward(self, x):
x = self.conv(x)
if self.bn is not None:
x = self.bn(x)
if self.relu is not None:
x = self.relu(x)
return x
class ZPool(nn.Module):
def forward(self, x):
return torch.cat((torch.max(x, 1)[0].unsqueeze(1), torch.mean(x, 1).unsqueeze(1)), dim=1)
class AttentionGate(nn.Module):
def __init__(self):
super(AttentionGate, self).__init__()
kernel_size = 7
self.compress = ZPool()
self.conv = BasicConv(2, 1, kernel_size, stride=1, padding=(kernel_size - 1) // 2, relu=False)
def forward(self, x):
x_compress = self.compress(x)
x_out = self.conv(x_compress)
scale = torch.sigmoid_(x_out)
return x * scale
class TripletAttention(nn.Module):
def __init__(self, no_spatial=False):
super(TripletAttention, self).__init__()
self.cw = AttentionGate()
self.hc = AttentionGate()
self.no_spatial = no_spatial
if not no_spatial:
self.hw = AttentionGate()
def forward(self, x):
x_perm1 = x.permute(0, 2, 1, 3).contiguous()
x_out1 = self.cw(x_perm1)
x_out11 = x_out1.permute(0, 2, 1, 3).contiguous()
x_perm2 = x.permute(0, 3, 2, 1).contiguous()
x_out2 = self.hc(x_perm2)
x_out21 = x_out2.permute(0, 3, 2, 1).contiguous()
if not self.no_spatial:
x_out = self.hw(x)
x_out = 1 / 3 * (x_out + x_out11 + x_out21)
else:
x_out = 1 / 2 * (x_out11 + x_out21)
return x_out
###################### TripletAttention #### END by AI&CV ###############################2.2Triple加入tasks.py
def parse_model(d, ch, verbose=True): 加入以下代码
elif m is TripletAttention:
c1, c2 = ch[f], args[0]
if c2 != nc:
c2 = make_divisible(min(c2, max_channels) * width, 8)
args = [c1, *args[1:]]2.3 修改yolov8s_TripletAttention.yaml
# Ultralytics YOLO 🚀, GPL-3.0 license
# YOLOv8 object detection model with P3-P5 outputs. For Usage examples see https://docs.ultralytics.com/tasks/detect
# Parameters
nc: 4 # number of classes
scales: # model compound scaling constants, i.e. 'model=yolov8n.yaml' will call yolov8.yaml with scale 'n'
# [depth, width, max_channels]
n: [0.33, 0.25, 1024] # YOLOv8n summary: 225 layers, 3157200 parameters, 3157184 gradients, 8.9 GFLOPs
s: [0.33, 0.50, 1024] # YOLOv8s summary: 225 layers, 11166560 parameters, 11166544 gradients, 28.8 GFLOPs
m: [0.67, 0.75, 768] # YOLOv8m summary: 295 layers, 25902640 parameters, 25902624 gradients, 79.3 GFLOPs
l: [1.00, 1.00, 512] # YOLOv8l summary: 365 layers, 43691520 parameters, 43691504 gradients, 165.7 GFLOPs
x: [1.00, 1.25, 512] # YOLOv8x summary: 365 layers, 68229648 parameters, 68229632 gradients, 258.5 GFLOPs
# YOLOv8.0n backbone
backbone:
# [from, repeats, module, args]
- [-1, 1, Conv, [64, 3, 2]] # 0-P1/2
- [-1, 1, Conv, [128, 3, 2]] # 1-P2/4
- [-1, 3, C2f, [128, True]]
- [-1, 1, Conv, [256, 3, 2]] # 3-P3/8
- [-1, 6, C2f, [256, True]]
- [-1, 1, Conv, [512, 3, 2]] # 5-P4/16
- [-1, 6, C2f, [512, True]]
- [-1, 1, Conv, [1024, 3, 2]] # 7-P5/32
- [-1, 3, C2f, [1024, True]]
- [-1, 1, SPPF, [1024, 5]] # 9
# YOLOv8.0n head
head:
- [-1, 1, nn.Upsample, [None, 2, 'nearest']]
- [[-1, 6], 1, Concat, [1]] # cat backbone P4
- [-1, 3, C2f, [512]] # 12
- [-1, 1, nn.Upsample, [None, 2, 'nearest']]
- [[-1, 4], 1, Concat, [1]] # cat backbone P3
- [-1, 3, C2f, [256]] # 15 (P3/8-small)
- [-1, 1, Conv, [256, 3, 2]]
- [[-1, 12], 1, Concat, [1]] # cat head P4
- [-1, 3, C2f, [512]] # 18 (P4/16-medium)
- [-1, 1, Conv, [512, 3, 2]]
- [[-1, 9], 1, Concat, [1]] # cat head P5
- [-1, 3, C2f, [1024]] # 21 (P5/32-large)
- [-1, 1, TripletAttention, [1024]]
- [[15, 18, 22], 1, Detect, [nc]] # Detect(P3, P4, P5)