由于时间问题,从这一节开始只记录C++实现效果,加油
以下附上这一节调试用的程序
https://download.csdn.net/download/qq_45685327/87708069
1.初始化函数
void init(int &argc, char **argv, const std::string& name, uint32_t options = 0);作用:ROS初始化函数
参数:
1.argc :封装实参的个数(n+1)
2.argv :封装参数的数组
3.name :为集诶但命名(唯一性)
4.options :节点启动选项
返回值:void
使用:
1.argc 与 argv 的使用
如果按照ROS中的特定格式传入实参,那么ROS可以加以使用,比如用来设置全局参数,给节点重命名
2.options 的使用
节点名称需要保证唯一性,同一个节定不能重复启动,启动一个节点以后,再启动相同节点,前一个窗口的节
点运行就会被强制关闭,然后再在新的窗口重新运行节点
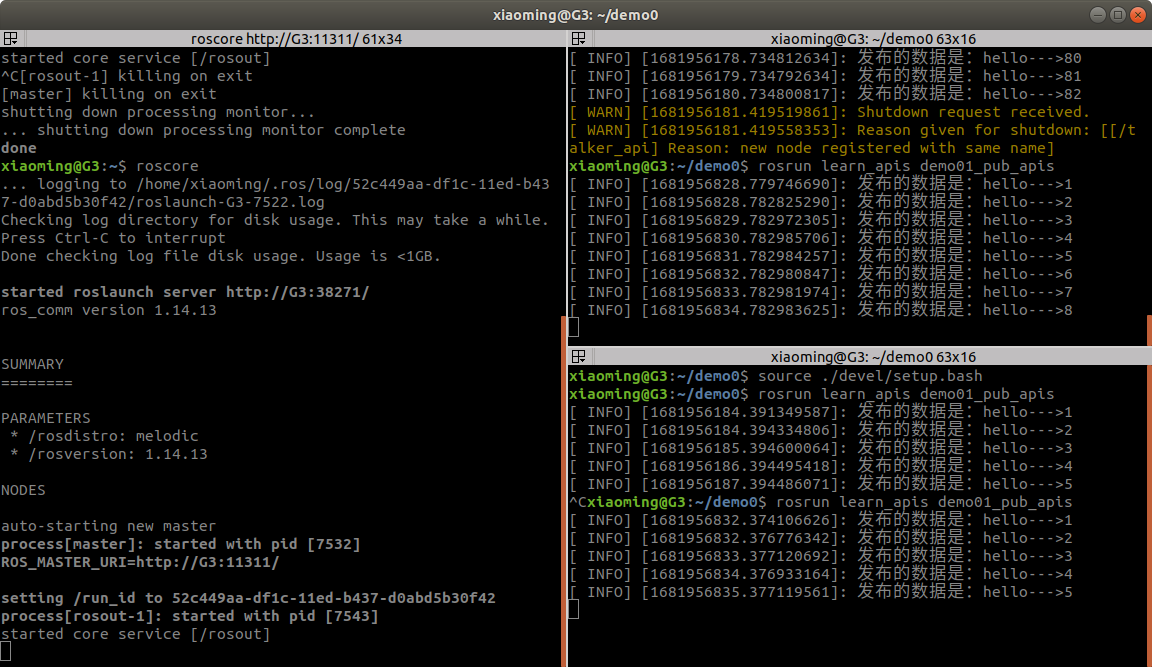
需求:特定场景下,需要一个节点多次启动且能正常运行,该怎么办?
ros::init(argc,argv,"talker_api",ros::init_options::AnonymousName);
这样写,每次打开相同节点就会在节点后面添加一个数字,两个都能正常运行
void init(int &argc, char **argv, const std::string& name, uint32_t options = 0);
实际操作:
2.1.argv作用
创建一个工程,demo01_pub_apis
使用命令给argv数组中添加参数并赋值
rosrun learn_apis demo01_pub_apis _number:=0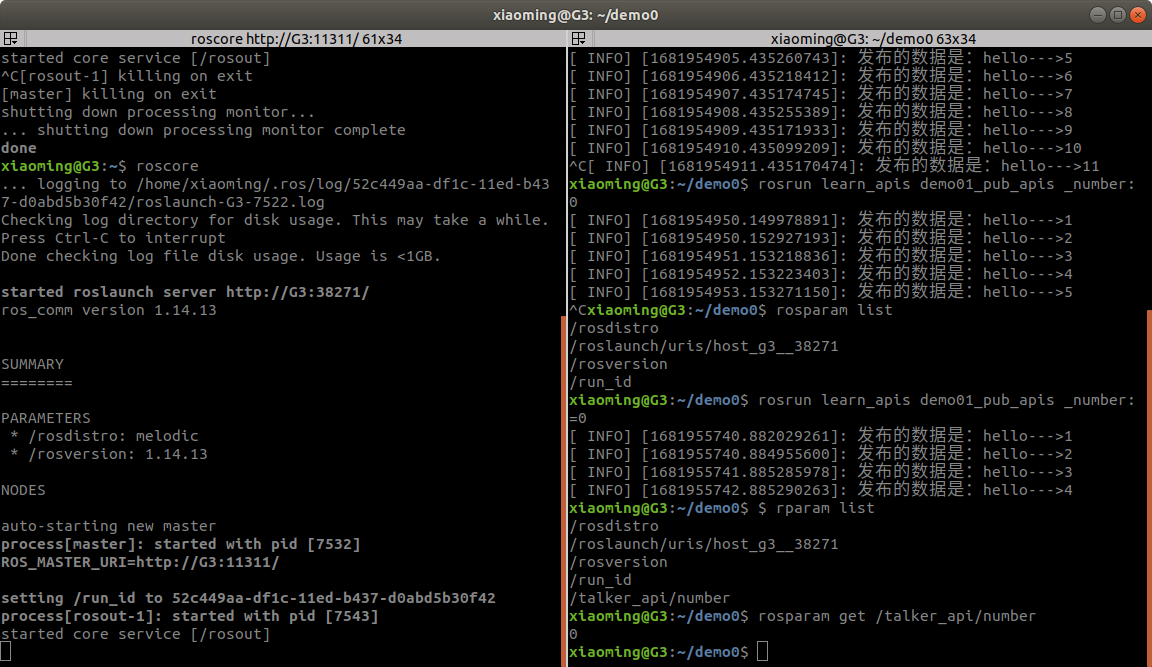
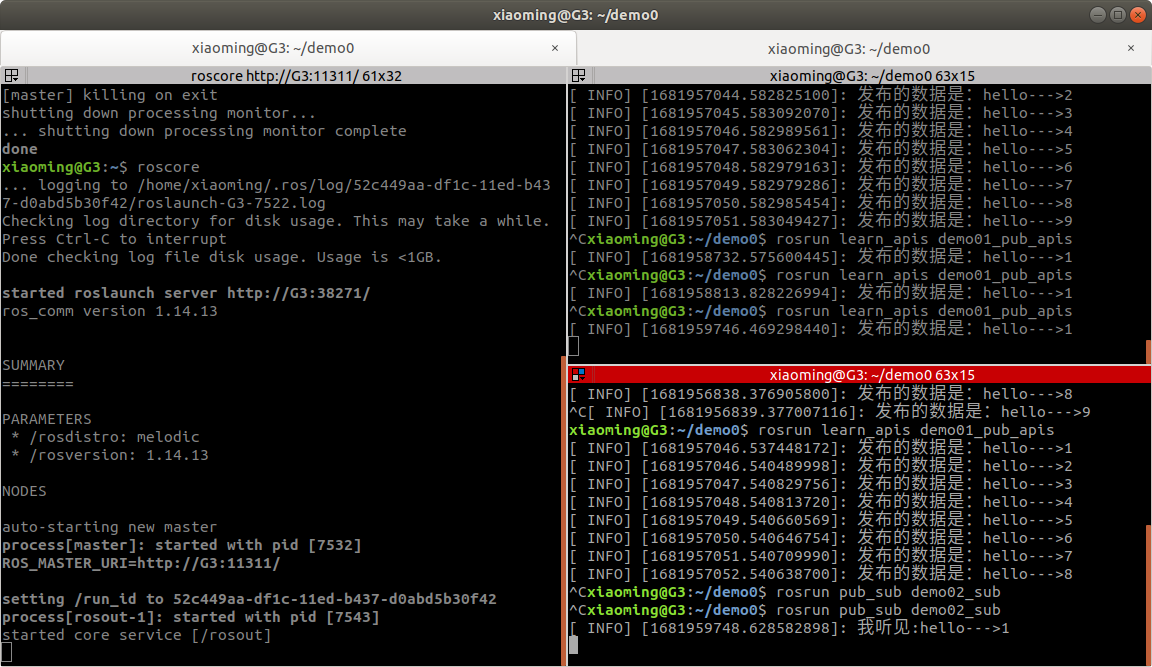
2.2options作用
启动一个节点以后,再启动相同节点,前一个窗口的节点运行就会被强制关闭,然后再在新的窗口重新运行节点
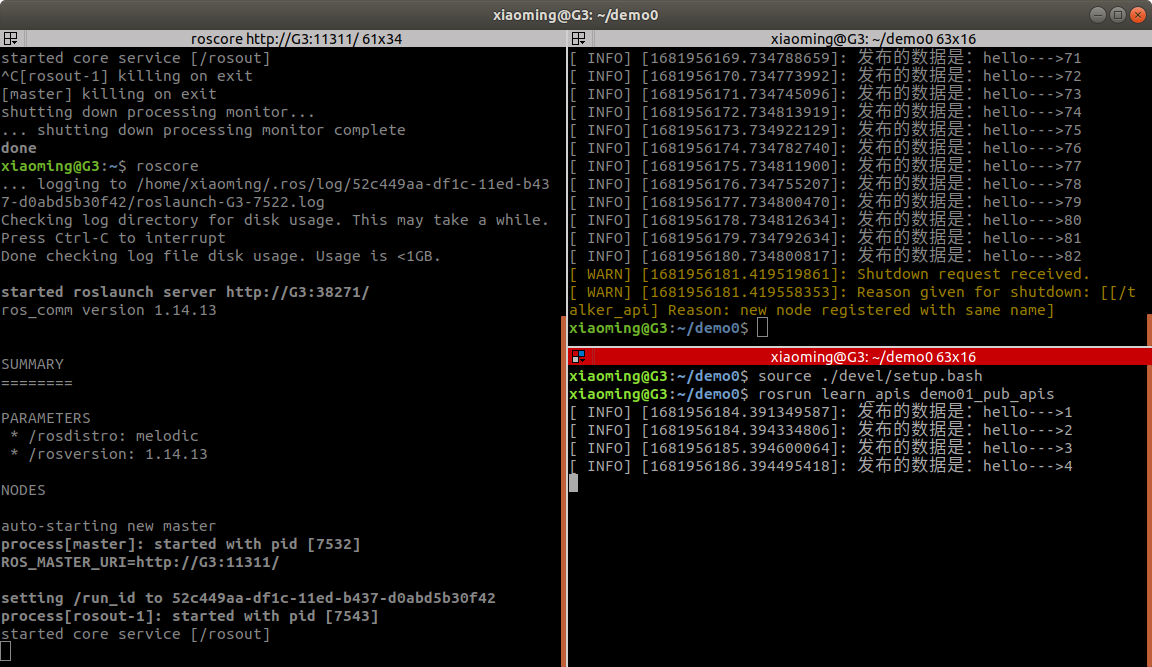
ros::init(argc,argv,"talker_api",ros::init_options::AnonymousName);
这样设置
2.创建发布者对象
作用:创建发布者对象
模板:被发布的消息的类型
参数:
1.话题名称
2.队列长度
3.latch(可选)如果设置为true,会保存发布方的最后一条消息,并且新的订阅对象连接到发布方时,发布
方会将这条消息发送给订阅者
使用
latch 设置为 true的作用?
以静态地图发布为例,方案一:可以使用固定频率发布数据,效率低。方案二:可以将地图发布对象的latch
并且发布方只发布一次数据,每当订阅者连接时,将地图信息发送给订阅者(只发送一次),这样提升数据发
送效率 ros::Publisher pub = nh.advertise<std_msgs::String>("apis_0",10,true);
3.回旋函数
在ROS程序中,频繁的使用了 ros::spin() 和 ros::spinOnce() 两个回旋函数,可以用于处理回调函数。
3.1spinOnce()
/**
* \brief 处理一轮回调
*
* 一般应用场景:
* 在循环体内,处理所有可用的回调函数
*
*/
ROSCPP_DECL void spinOnce();
3.2spin()
/**
* \brief 进入循环处理回调
*/
ROSCPP_DECL void spin();
3.3二者比较
相同点:二者都用于处理回调函数;
不同点:ros::spin() 是进入了循环执行回调函数,而 ros::spinOnce() 只会执行一次回调函数(没有循环),在 ros::spin() 后的语句不会执行到,而 ros::spinOnce() 后的语句可以执行。
4.时间
ROS中时间相关的API是极其常用,比如:获取当前时刻、持续时间的设置、执行频率、休眠、定时器...都与时间相关。
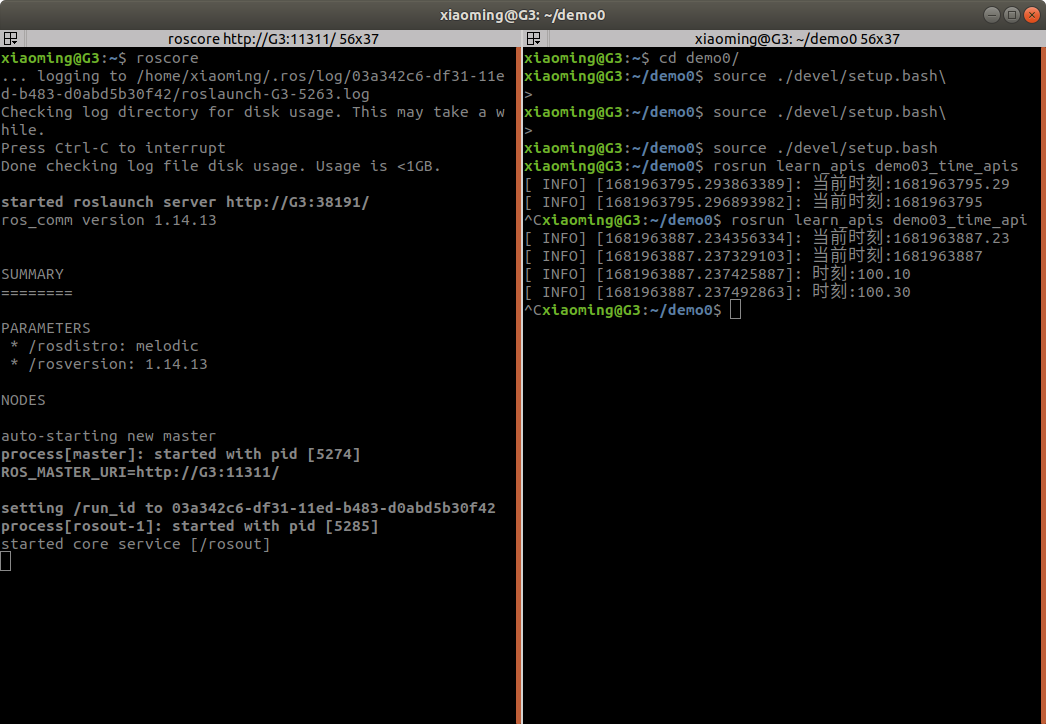
4.1时刻
获取时刻,或是设置指定时刻:
ros::init(argc,argv,"hello_time");
ros::NodeHandle nh;//必须创建句柄,否则时间没有初始化,导致后续API调用失败
ros::Time right_now = ros::Time::now();//将当前时刻封装成对象
ROS_INFO("当前时刻:%.2f",right_now.toSec());//获取距离 1970年01月01日 00:00:00 的秒数
ROS_INFO("当前时刻:%d",right_now.sec);//获取距离 1970年01月01日 00:00:00 的秒数
ros::Time someTime(100,100000000);// 参数1:秒数 参数2:纳秒
ROS_INFO("时刻:%.2f",someTime.toSec()); //100.10
ros::Time someTime2(100.3);//直接传入 double 类型的秒数
ROS_INFO("时刻:%.2f",someTime2.toSec()); //100.30
演示效果
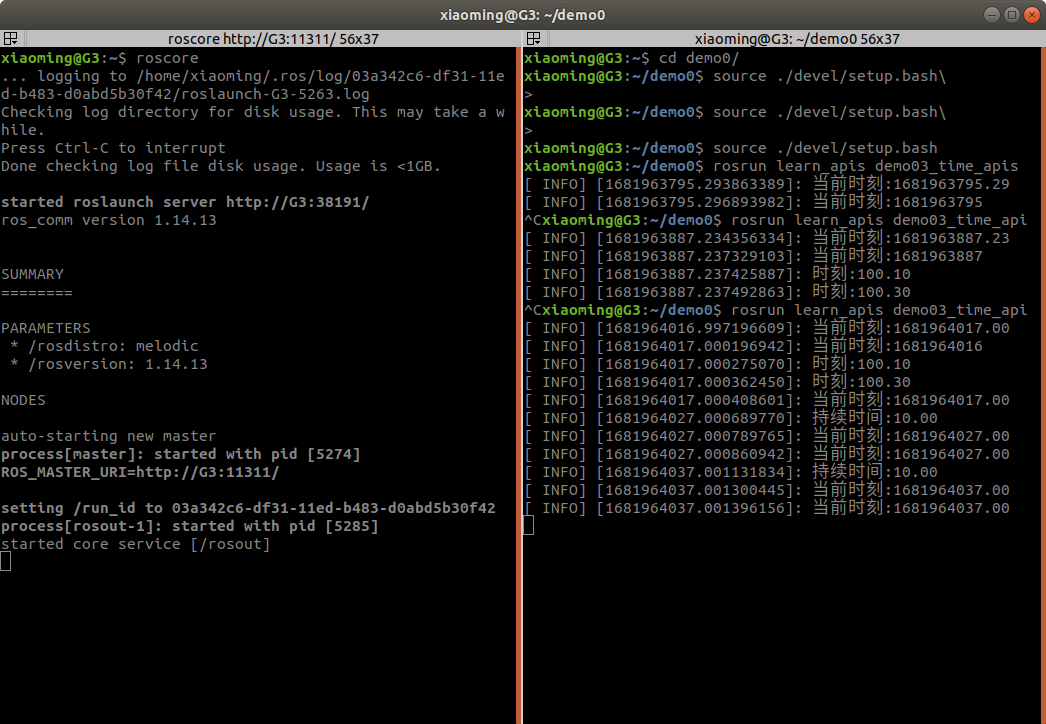
4.2持续时间
设置一个时间区间(间隔):
ROS_INFO("当前时刻:%.2f",ros::Time::now().toSec());
ros::Duration du(10);//持续10秒钟,参数是double类型的,以秒为单位
du.sleep();//按照指定的持续时间休眠
ROS_INFO("持续时间:%.2f",du.toSec());//将持续时间换算成秒
ROS_INFO("当前时刻:%.2f",ros::Time::now().toSec());
演示效果
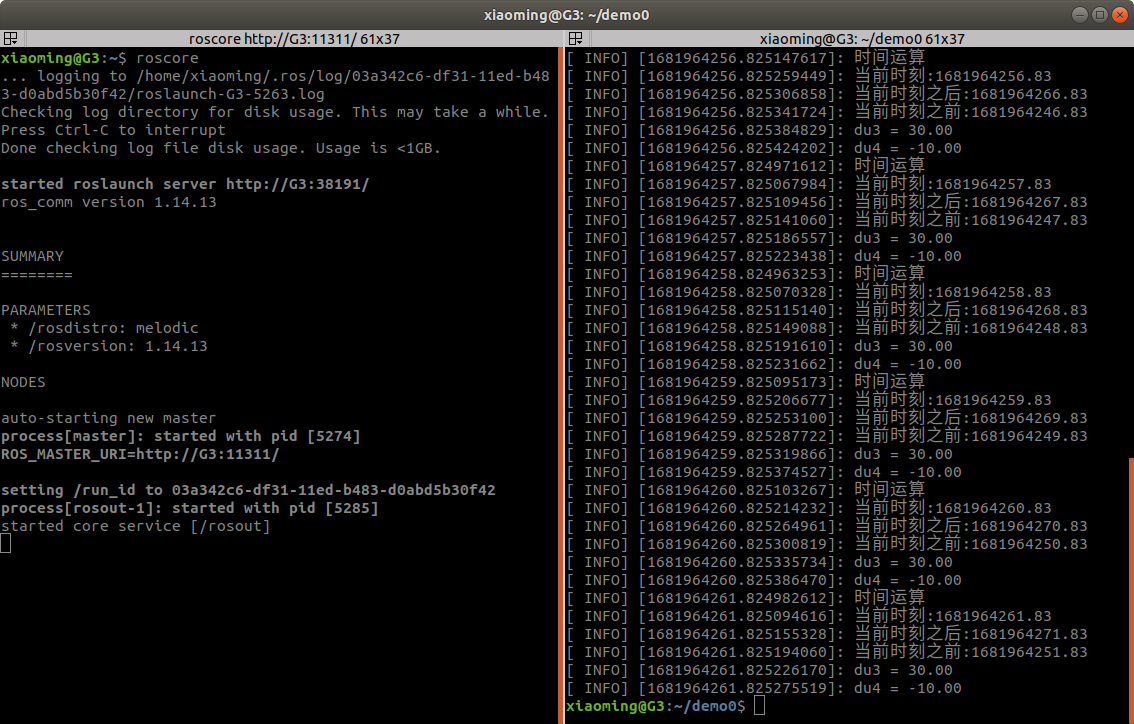
4.3持续时间与时刻运算
为了方便使用,ROS中提供了时间与时刻的运算:
ROS_INFO("时间运算");
ros::Time now = ros::Time::now();
ros::Duration du1(10);
ros::Duration du2(20);
ROS_INFO("当前时刻:%.2f",now.toSec());
//1.time 与 duration 运算
ros::Time after_now = now + du1;
ros::Time before_now = now - du1;
ROS_INFO("当前时刻之后:%.2f",after_now.toSec());
ROS_INFO("当前时刻之前:%.2f",before_now.toSec());
//2.duration 之间相互运算
ros::Duration du3 = du1 + du2;
ros::Duration du4 = du1 - du2;
ROS_INFO("du3 = %.2f",du3.toSec());
ROS_INFO("du4 = %.2f",du4.toSec());
//PS: time 与 time 不可以运算
// ros::Time nn = now + before_now;//异常
运行效果
4.4设置运行频率
ros::Rate rate(1);//指定频率
while (true)
{
ROS_INFO("-----------code----------");
rate.sleep();//休眠,休眠时间 = 1 / 频率。
}
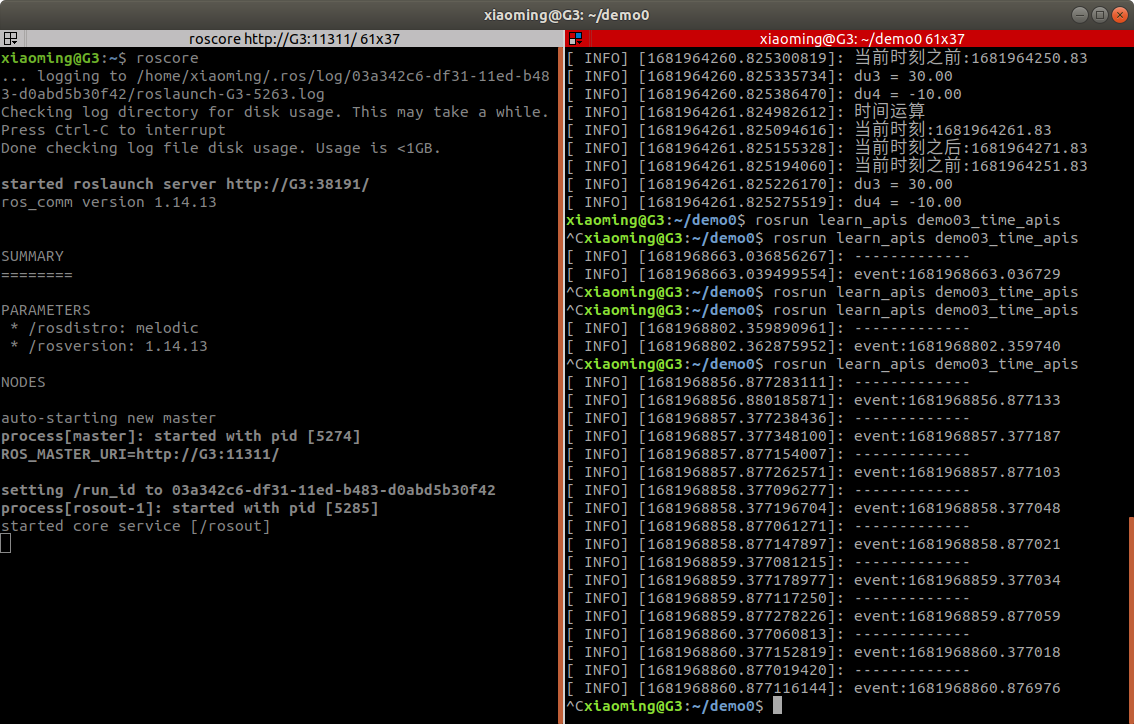
4.5定时器
ROS 中内置了专门的定时器,可以实现与 ros::Rate 类似的效果:
ros::NodeHandle nh;//必须创建句柄,否则时间没有初始化,导致后续API调用失败
// ROS 定时器
/**
* \brief 创建一个定时器,按照指定频率调用回调函数。
*
* \param period 时间间隔
* \param callback 回调函数
* \param oneshot 如果设置为 true,只执行一次回调函数,设置为 false,就循环执行。
* \param autostart 如果为true,返回已经启动的定时器,设置为 false,需要手动启动。
*/
//Timer createTimer(Duration period, const TimerCallback& callback, bool oneshot = false,
// bool autostart = true) const;
// ros::Timer timer = nh.createTimer(ros::Duration(0.5),doSomeThing);
ros::Timer timer = nh.createTimer(ros::Duration(0.5),doSomeThing,true);//只执行一次
// ros::Timer timer = nh.createTimer(ros::Duration(0.5),doSomeThing,false,false);//需要手动启动
// timer.start();
ros::spin(); //必须 spin
定时器的回调函数:
void doSomeThing(const ros::TimerEvent &event){
ROS_INFO("-------------");
ROS_INFO("event:%s",std::to_string(event.current_real.toSec()).c_str());
}
运行效果
5.其他函数
在发布实现时,一般会循环发布消息,循环的判断条件一般由节点状态来控制,C++中可以通过 ros::ok() 来判断节点状态是否正常,而 python 中则通过 rospy.is_shutdown() 来实现判断,导致节点退出的原因主要有如下几种:
- 节点接收到了关闭信息,比如常用的 ctrl + c 快捷键就是关闭节点的信号;
- 同名节点启动,导致现有节点退出;
- 程序中的其他部分调用了节点关闭相关的API(C++中是ros::shutdown(),python中是rospy.signal_shutdown())
另外,日志相关的函数也是极其常用的,在ROS中日志被划分成如下级别:
- DEBUG(调试):只在调试时使用,此类消息不会输出到控制台;
- INFO(信息):标准消息,一般用于说明系统内正在执行的操作;
- WARN(警告):提醒一些异常情况,但程序仍然可以执行;
- ERROR(错误):提示错误信息,此类错误会影响程序运行;
- FATAL(严重错误):此类错误将阻止节点继续运行。
5.1节点状态判断
/** \brief 检查节点是否已经退出
*
* ros::shutdown() 被调用且执行完毕后,该函数将会返回 false
*
* \return true 如果节点还健在, false 如果节点已经火化了。
*/
bool ok();
5.2节点关闭函数
/*
* 关闭节点
*/
void shutdown();
5.3日志函数
使用示例
ROS_DEBUG("hello,DEBUG"); //不会输出
ROS_INFO("hello,INFO"); //默认白色字体
ROS_WARN("Hello,WARN"); //默认黄色字体
ROS_ERROR("hello,ERROR");//默认红色字体
ROS_FATAL("hello,FATAL");//默认红色字体

![[ZJCTF 2019]EasyHeap-patchlibc-调试](https://img-blog.csdnimg.cn/326d6f676093479bb530c718d220ff59.png)