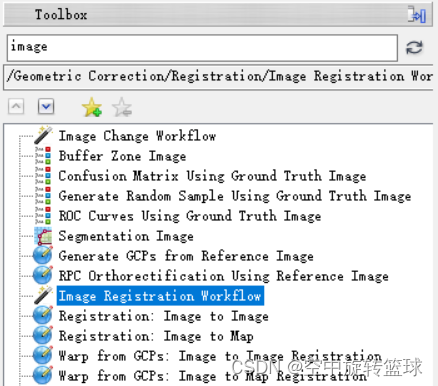
ENVI5.3 自动配准流程化工具(Image Registration Workflow)配准方法流程。
打开 ENVI软件中的Image Registration Workflow工具,分辨打开参考图像和待校正的图像。
Base Image File是参考图像,参考图像的范围应比待校正图像的范围大,Warp Image File是待校正图像。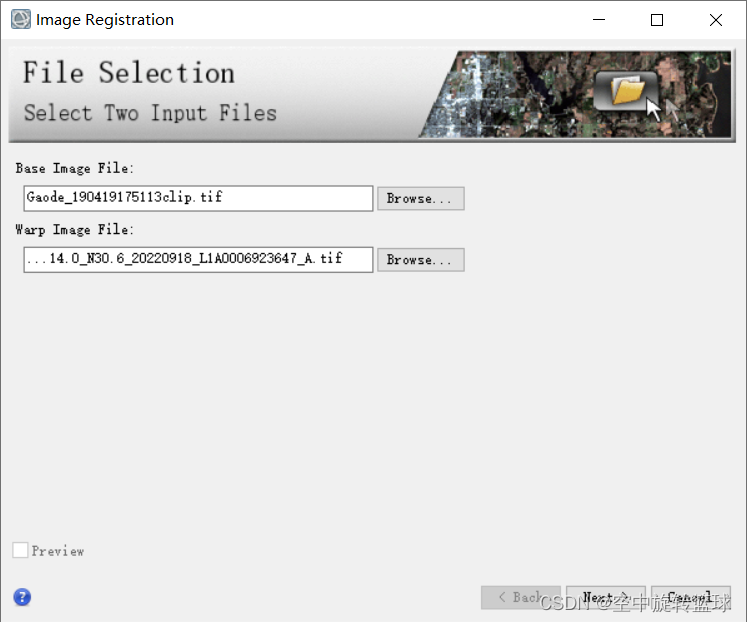
点击Next进入下一步,这一步中涉及到很多参数和方法:

Main面板参数说明如下:原文:(2条消息) ENVI学习总结(六)——图像自动配准_image registration workflow_sysun的博客-CSDN博客
- 匹配算法(Matching Method): 提供两种算法,Cross Correlation:一般用于相同形态的图像,如都是光学图像;Mutual Information:一般用于不同形态的图像,如光学-雷达图像,热红外、可见光等。
- 最小 Tie 点匹配度阈值(Minimum Matching Score):自动找点功能会给找到的点计算一个分值,分值越高精度越高。当找到的 Tie 点低于这个阈值,则会自动删除不参与校正。阈值范围 0-1。
- 几何模型(Geometric Model):提供三种过滤 Tie 点的几何模型,不同模型适用不同类型的图像,以及需要设置不同的参数。
- Fitting Global Transform:适合绝大部分的图像。还需要设置以下两个参数:
- 变换模型(Transform):包括一次多项式 First-Order Polynomial 和放射变化RST。
- 每个连接点最大允许误差(Maximum Allowable Error Per Tie Point):这个值越大,保留的 Tie 越多,当精度约差。
- Frame Central Projection:适合于框幅式中心投影的航空影像数据。
- Pushbroom Sensor:适合带有 RPC 文件的图像

Seed Tie Points参数如下:
- Switch To Warp/Switch to Base:基准影像与待配准影像视图切换按钮
- Show Table:种子点列表
- Start Editing:添加和编辑种子点
- Seed Tie Points: 种子点个数
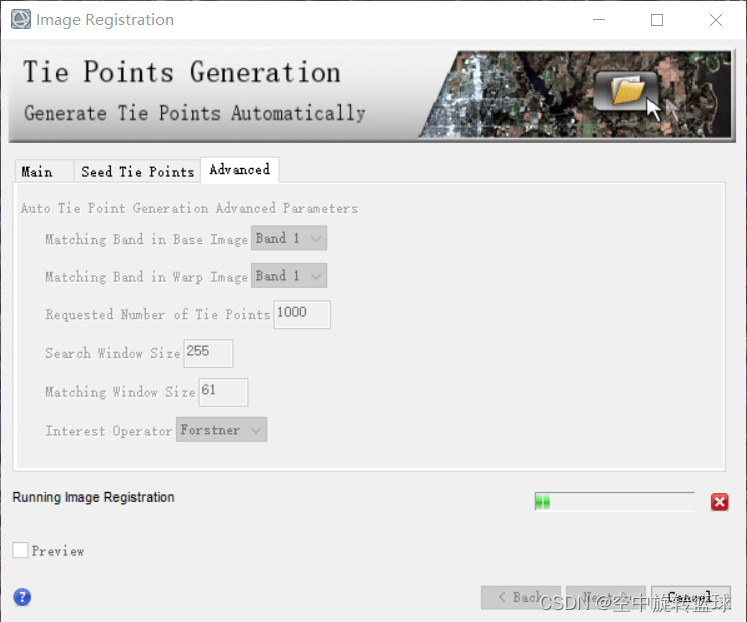
Advance参数说明如下:
- Matching Band in Base Image:基准影像配准波段
- Matching Band in Warp Image:待配准影像配准波段
- Requested Number of Tie Points:Tie 点个数,不能小于 9。
- Search Window Size:搜索窗口大小,需要大于匹配窗口大小,搜索窗口越大,找到的点越精确,但是需要时间越长。简单预测搜索窗大小的方法:让待配准图像 50%透明显示,之后量测两个同名点之间的像素距离 D,搜索窗口最小为(D+5)*2
- Matching Window Size:匹配窗口大小,会根据输入图像的分辨率自动调整一个默认值。
- Interest Operator:角点算子,Forstner 方法精度最高速度最慢。
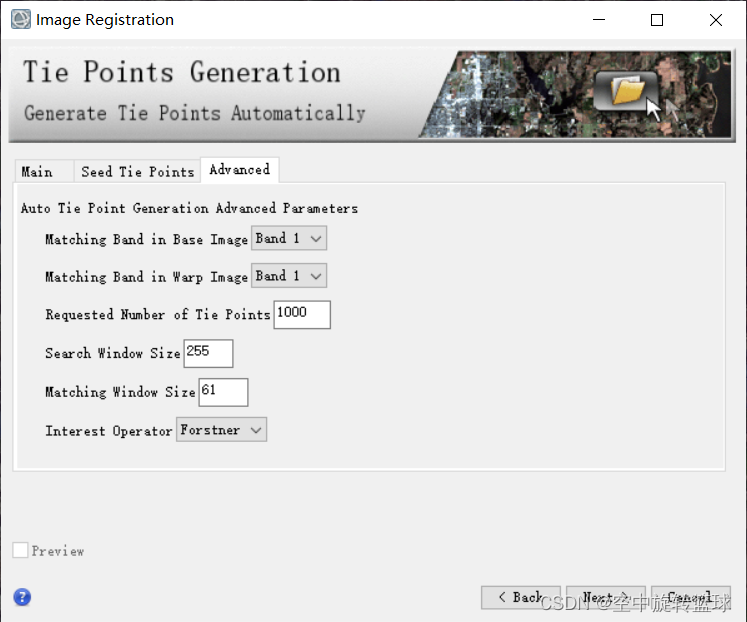
以上都用默认参数,点击下一步开始计算:
进入下一步,参数如下:
- Switch To Warp/Switch to Base:基准影像与待配准影像视图切换按钮
- Show Table:Tie 点列表
- Start Editing:添加和编辑 Tie 点
- Tie Points:Tie 点个数
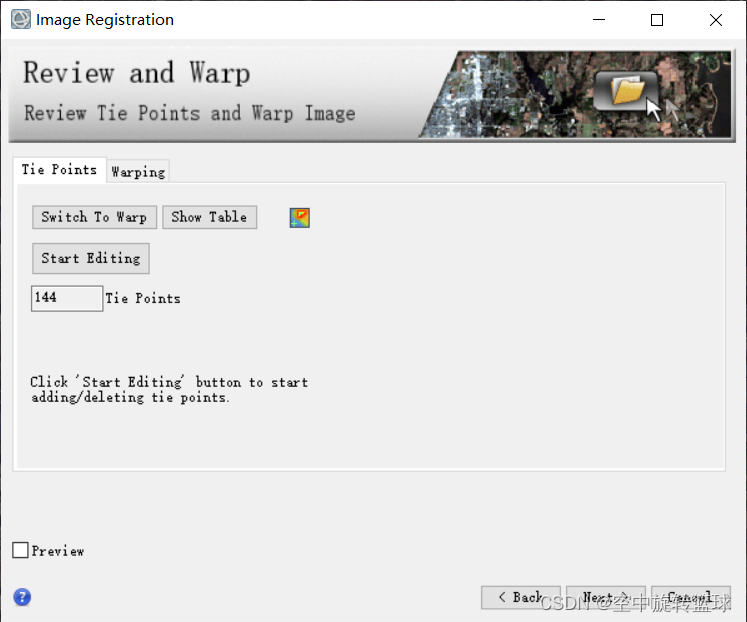
可以删除误差比较大的控制点。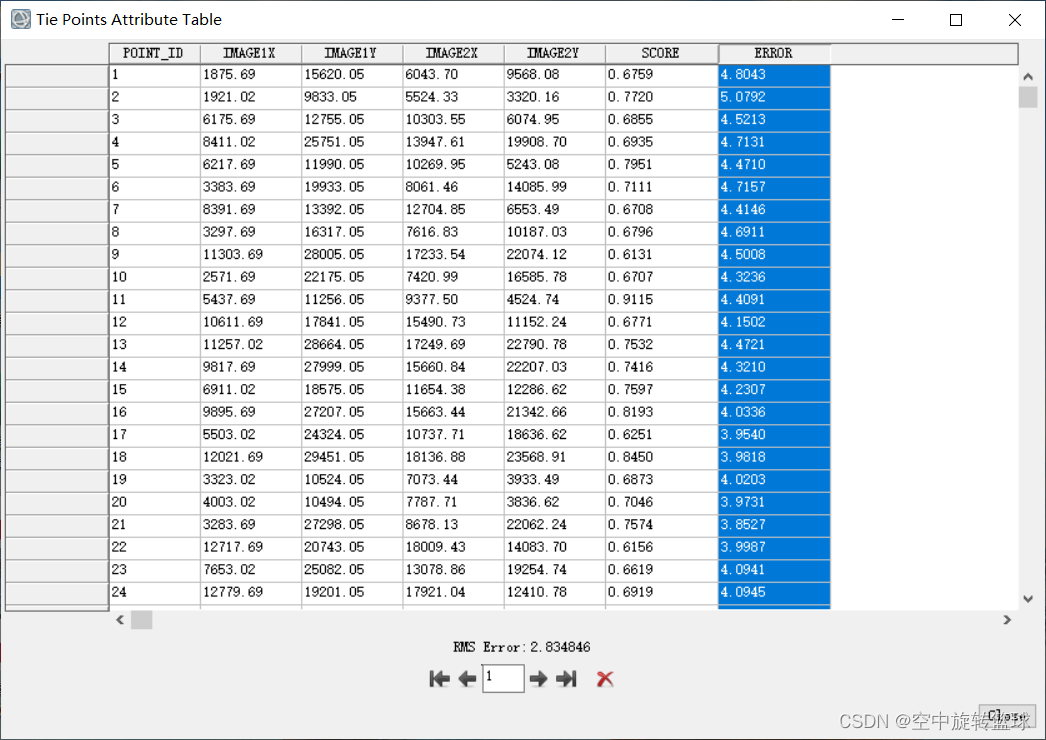
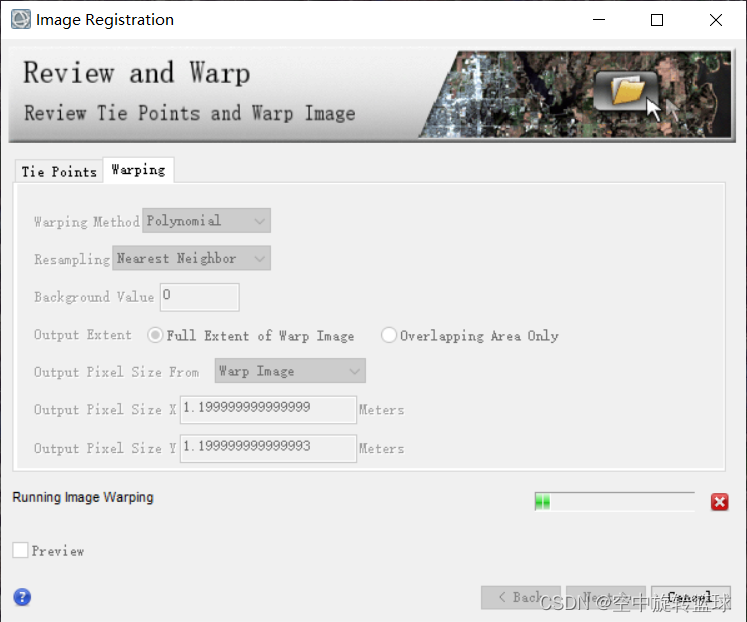
设置相关参数,点击下一步开始计算。
- 纠正模型(Warping Method): 放射变化(RST)、多项式(Polynomial)、局部三角网(Triangulation),默认为多项式;
- 重采样方法(Resampling): Cubic Convolution;
- 输出像元大小(Output Pixel Size from):Warp Image;
- 背景值(Background Value): 0;

影像分辨率比较高,2m,计算时间很长,手动校正两个了还没算完 。
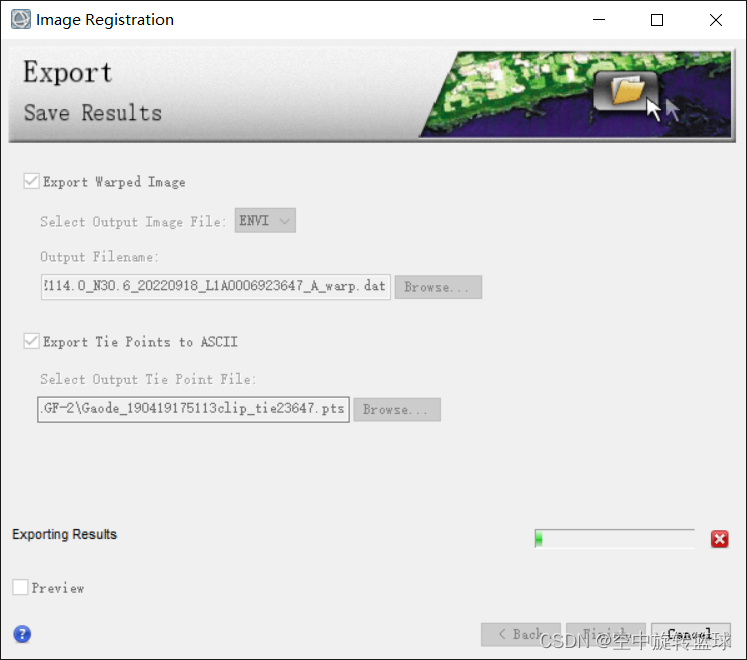
计算完成之后输出图像,默认为warp图像路径。
 计算也需要一会儿时间,
计算也需要一会儿时间,
效果和手动校正对比了一下,局部区域效果还可以的,也有些局部区域偏差较大。