使用C++实现编写简单的服务器和客户端
目录
使用C++实现编写简单的服务器和客户端
一、程序编写
1、创建软件包
2、编译软件包
3、软件配置
4、服务器程序编写
5、客户端程序编写
6、软件包设置
7、设置编译选项
二、程序测试
1、编译程序
2、开启节点测试运行
3、执行效果展示
上一讲我们讲解了如何编写一个发布者和订阅者程序。本章节继续讲解程序模板,如何编写一个服务器和客户端程序。对于后续的实战开发,前期的理论教学还是少不了,请大家多多阅读。
一、程序编写
1、创建软件包
继续将软件包创建src目录下,方便统一存放和管理。
ros2 pkg create --build-type ament_cmake cpp_srvcli --dependencies rclcpp example_interfaces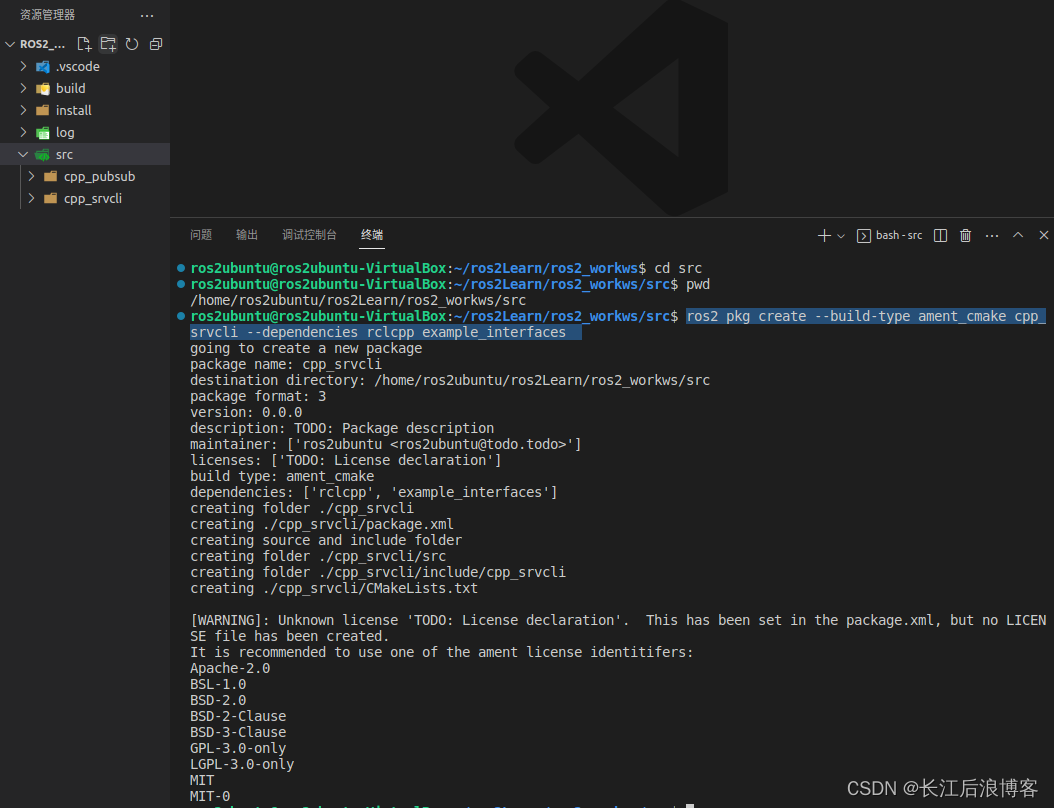
2、编译软件包
回到上级目录进行编译工作,注意路径。
colcon build --packages-select cpp_srvcli
3、软件配置
软件编程环境配置,参考上一章节
【手把手做ROS2机器人系统开发三】搭建vscode编程环境
【手把手做ROS2机器人系统开发四】使用C++实现编写简单的发布者和订阅者
4、服务器程序编写
服务器代码路径:
src/cpp_srvcli/src/add_two_ints_server.cpp实现两个数相加基本运算服务
/**
* @file add_two_ints_server.cpp
* @author gmotion (motion_gui@126.com)
* @brief 发布服务器节点
* @version 0.1
* @date 2022-06-10
* @copyright Copyright (c) 2022
*/
#include <memory> //内存管理
#include <string> //字符串
#include <rclcpp/rclcpp.hpp>
//这里使用示例中的接口,后续章节会重点讲解如何自定义专用接口
#include <example_interfaces/srv/add_two_ints.hpp>
//添加服务信息
void add(const std::shared_ptr<example_interfaces::srv::AddTwoInts::Request>reques,
std::shared_ptr<example_interfaces::srv::AddTwoInts::Response>response)
{
response->sum = reques->a + reques->b;
RCLCPP_INFO(rclcpp::get_logger("rclcpp"),"Incoming request\n a:%ld " "b: %ld",
reques->a,reques->b);
RCLCPP_INFO(rclcpp::get_logger("rclcpp"),"sending back response: [%ld] ",
(long int)response->sum);
}
//主运行程序
int main(int argc,char * argv[])
{
rclcpp::init(argc,argv);
//创建服务名称节点
std::shared_ptr<rclcpp::Node>node = rclcpp::Node::make_shared("add_two_ints_server");
//创建服务函数
rclcpp::Service<example_interfaces::srv::AddTwoInts>::SharedPtr service=
node->create_service<example_interfaces::srv::AddTwoInts>("add_two_ints",&add);
RCLCPP_INFO(rclcpp::get_logger("rclcpp"),"Ready to add two ints.");
rclcpp::spin(node);
rclcpp::shutdown();
return 0;
}
5、客户端程序编写
客户端代码路径:
src/cpp_srvcli/src/add_two_ints_client.cpp实现请求服务器调用计算,测试服务器是否正确运行
/**
* @file add_two_ints_client.cpp
* @author gmotion (motion_gui@126.com)
* @brief 客户端-请求服务器计算
* @version 0.1
* @date 2022-06-10
* @copyright Copyright (c) 2022
*/
#include <chrono> //处理时间类
#include <cstdlib> //标准函数库
#include <memory> //内存管理
#include <rclcpp/rclcpp.hpp>
#include <example_interfaces/srv/add_two_ints.hpp>
using namespace std::chrono_literals;
//主程序函数
int main(int argc,char * argv[])
{
rclcpp::init(argc,argv);
//参数数量发生错误
//传入两个计算对应的数值-用于请求服务器及计算
if(argc !=3)
{
RCLCPP_INFO(rclcpp::get_logger("rclcpp"),"usage: add_two_ints_client X Y");
return 1;
}
//建立node节点
std::shared_ptr<rclcpp::Node>node = rclcpp::Node::make_shared("add_two_ints_client");
//建立客户端
rclcpp::Client<example_interfaces::srv::AddTwoInts>::SharedPtr client =
node->create_client<example_interfaces::srv::AddTwoInts>("add_two_ints");
//建立请求发送参数
auto request = std::make_shared<example_interfaces::srv::AddTwoInts::Request>();
request->a = atoll(argv[1]);
request->b = atoll(argv[2]);
//等待服务
while (!client->wait_for_service(1s))
{
if (!rclcpp::ok())
{
RCLCPP_INFO(rclcpp::get_logger("rclcpp"),"service no avaiable,wait again...");
}
}
//发送运行请求
auto result = client->async_send_request(request);
//等待运行结果
if(rclcpp::spin_until_future_complete(node,result) == rclcpp::FutureReturnCode::SUCCESS)
{
RCLCPP_INFO(rclcpp::get_logger("rclcpp"),"Sum: %ld",result.get()->sum);
}
else
{
RCLCPP_ERROR(rclcpp::get_logger("rclcpp"),"Failed to call service add_two_ints");
}
rclcpp::shutdown();
return 0;
}6、软件包设置
src/cpp_srvcli/package.xml<?xml version="1.0"?>
<?xml-model href="http://download.ros.org/schema/package_format3.xsd" schematypens="http://www.w3.org/2001/XMLSchema"?>
<package format="3">
<name>cpp_srvcli</name>
<version>0.0.0</version>
<description>C++ client server tutorial</description>
<maintainer email="motion_gui@126.com">gmotion</maintainer>
<license>Apache License 2.0</license>
<buildtool_depend>ament_cmake</buildtool_depend>
<depend>rclcpp</depend>
<depend>example_interfaces</depend>
<test_depend>ament_lint_auto</test_depend>
<test_depend>ament_lint_common</test_depend>
<export>
<build_type>ament_cmake</build_type>
</export>
</package>
7、设置编译选项
src/cpp_srvcli/CMakeLists.txtcmake_minimum_required(VERSION 3.8)
project(cpp_pubsub)
# Default to C99
if(NOT CMAKE_C_STANDARD)
set(CMAKE_C_STANDARD 99)
endif()
# Default to C++14
if(NOT CMAKE_CXX_STANDARD)
set(CMAKE_CXX_STANDARD 14)
endif()
if(CMAKE_COMPILER_IS_GNUCXX OR CMAKE_CXX_COMPILER_ID MATCHES "Clang")
add_compile_options(-Wall -Wextra -Wpedantic)
endif()
# find dependencies
find_package(ament_cmake REQUIRED)
# uncomment the following section in order to fill in
# further dependencies manually.
# find_package(<dependency> REQUIRED)
find_package(rclcpp REQUIRED)
find_package(std_msgs REQUIRED)
add_executable(talker src/publisher_member_function.cpp)
ament_target_dependencies(talker rclcpp std_msgs)
add_executable(listener src/subscriber_member_function.cpp)
ament_target_dependencies(listener rclcpp std_msgs)
install(TARGETS
talker
listener
DESTINATION lib/${PROJECT_NAME})
if(BUILD_TESTING)
find_package(ament_lint_auto REQUIRED)
# the following line skips the linter which checks for copyrights
# comment the line when a copyright and license is added to all source files
set(ament_cmake_copyright_FOUND TRUE)
# the following line skips cpplint (only works in a git repo)
# comment the line when this package is in a git repo and when
# a copyright and license is added to all source files
set(ament_cmake_cpplint_FOUND TRUE)
ament_lint_auto_find_test_dependencies()
endif()
ament_package()
二、程序测试
1、编译程序
单一软件包指定编译
colcon build --packages-select cpp_srvcli2、开启节点测试运行
服务器终端:
. install/setup.bash
ros2 run cpp_srvcli server客户端终端:
. install/setup.bash
ros2 run cpp_srvcli client 12 103、执行效果展示
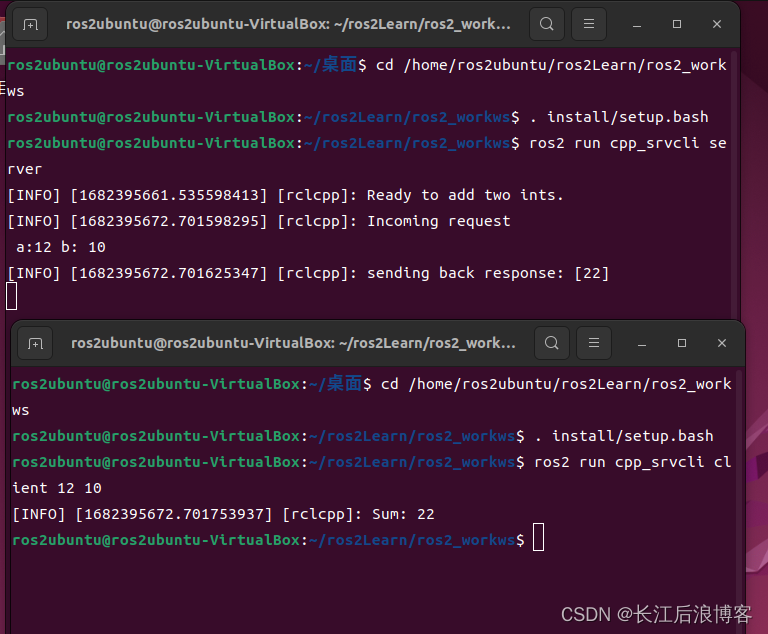
程序准确执行,达到预期结果。本节实现一个简单的服务器节点和一个客户端节点。更多精彩内容,欢迎订阅,敬请阅读下一章内容。谢谢大家的阅读。。。