从1R、2R、3R到整车360°感知方案,毫米波雷达的前装市场需求量依然保持着快速增长的态势。
高工智能汽车研究院监测数据显示,2022年中国市场(不含进出口)前装标配搭载ADAS毫米波雷达(前向+后向+盲区)交付1795.27万颗,同比增长31.21%;

其中,前向搭载同比增长25.21%,盲区同比增长37.73%。3R、5R配置,仍将是未来几年市场的主力,同时4D毫米波雷达进入快速成长期。
和激光雷达一样,4D毫米波雷达正在快速进入大众消费者的视野。
最新消息显示,特斯拉的HW4.0硬件系统将配置一颗高分辨率毫米波雷达(4D毫米波雷达),引发了行业内外高度关注,这也意味着一轮新智驾感知方案升级浪潮已经开启。
不久前上市的理想L7 Pro版本搭载的智能驾驶感知系统方案,采用了摄像头+4D毫米波雷达的配置,同样为4D毫米波雷达市场再添热度。
高工智能汽车研究院监测前装定点数据显示,到目前为止包括上汽、比亚迪、理想、吉利、红旗、长安等多个品牌已经定点或量产搭载4D毫米波雷达。加之特斯拉的加入,4D毫米波雷达渐有“比肩”激光雷达热度的势头。
从早两年各家企业竞相推出4D毫米波雷达产品,到少数企业领衔定点量产,再到今年开始进入规模落地验证,市场正在悄然变化。考验与竞争会愈来愈激烈,各大企业也纷纷快速打造自身的差异化核心优势。
然而,一些低调的企业正在悄然领先。
作为成立最早的毫米波雷达企业之一,纳瓦电子不仅早已研发出了性能成熟的4D毫米波雷达,并在业内首次提出4D毫米波雷达「域」的概念,且已取得突破成果,拿到了两家主机厂的定点,成为其超越传统外资供应商的杀手锏。
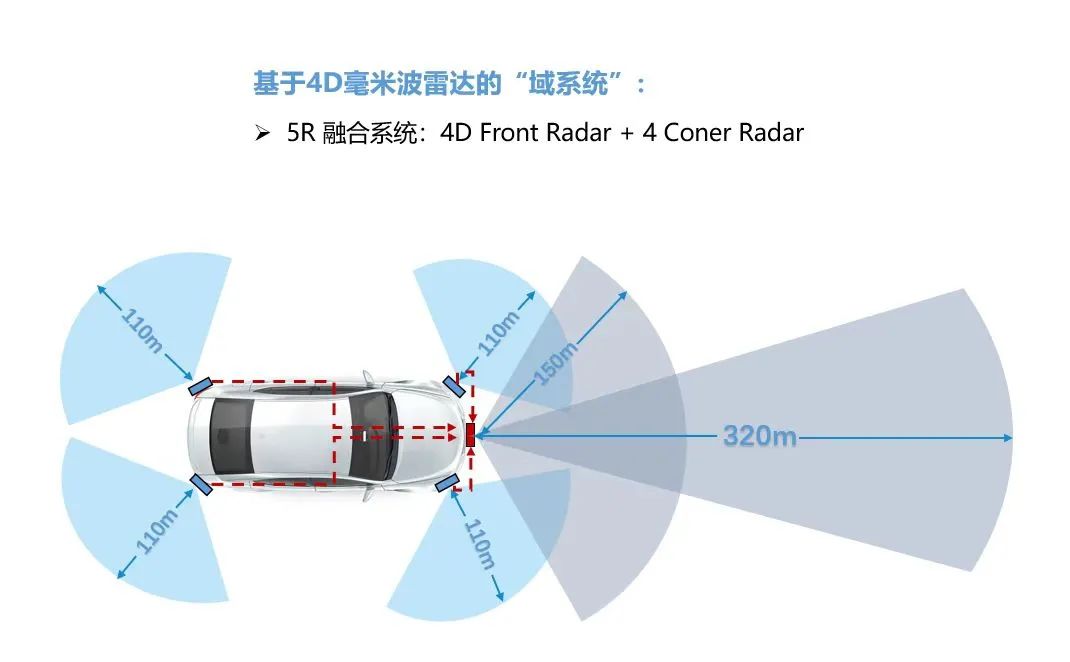

首发基于4D毫米波雷达的域系统
该系统基于高算力的4D毫米波雷达作为域管理雷达,对整车5颗毫米波雷达进行统一管理,对多颗雷达的点云数据预处理,精准探测不规则目标,扩展目标估计,提供高可靠更丰富的数据处理结果,弥补视觉和激光雷达在黑暗以及大雾,雨雪工况环境下的致命短板。
纳瓦电子CEO李建林表示,“雷达域系统是针对国内高速发展的智能驾驶市场而推出的一款务实接地气的毫米波雷达与视觉深度融合的系统级产品。国内的智能驾驶技术现已跑在了世界前列,因此也推动了4D毫米波雷达的量产趋势,继而为纳瓦电子推出毫米波雷达整体解决方案和毫米波雷达域系统提供了强劲的动力”。
从全行业来看,纳瓦电子的毫米波雷达产品以及基于4D毫米波雷达的雷达域系统也已走在了行业的前列。
首先,这套方案最关键的优势便是降低了整套感知系统中域控器本身的融合计算压力:“域控器要管理整个智驾系统,还要同时管理5个雷达,就需要同时计算5路CAN的收发数据,很大程度上会影响系统的实时性。而我们利用雷达域系统统一管理则可以先做一些预处理,再将目标结果交给域控制器。这样一来便可以极大程度提升算法效率,且实现更加安全可靠的管理。”李建林表示。
其次,雷达域使得雷达与视觉融合有了更高的配合度以及更深的融合度,可以从更底层的基础数据层面解决业界难啃的“corner case”,例如鬼探头,前车行人横穿,路障等。
事实上,在L2以上智能驾驶感知方案中,需要真正用好4D毫米波雷达,使其充分发挥其性能优势,才能更好实现更加可靠的智驾方案。
4D毫米波雷达在测高性能与分辨率上都有大幅的提升,这就需要在点云处理环节考虑如何用好“高度”这个新的信息维度;此外,还需要视觉与4D毫米波雷达形成感知融合,共同提高整个域控系统的综合分辨率。
但目前来看,无论是信号处理层的前融合,还是点云与目标处理的后融合,当前依旧均存在不小的难题,其主要原因还是信号质量的可靠性问题。
以上都极其考验毫米波雷达供应商和天线阵列设计能力和软件算法水平,同时还需要毫米波雷达与智驾系统深度配合,理解整车智驾系统中经常遇到“corner case”的核心问题点。
“造成“corner case”不好解决的原因就是一直以来雷达和视觉的融合度做得不够到位,过度依赖视觉。所以我们的方案就是让雷达本身的性能达到最大化,与视觉深度融合,有效提升数据的精细度,共同解决“corner case”。总结来讲,首先要提高雷达的信号质量,同时要基于雷达的资源做出视觉不能解决Cace的有效补充,这也正是车厂希望供应商解决的事情。我们做的实际上是毫米波雷达,视觉与域控制系统三者有机的深度融合,这不仅需要具备很深的雷达功力,还要能够基于雷达的资源做出与视觉和智驾功能层级的深度开发配合。”李建林表示。
融合这件事本身并不难,难点则在于信号的稳定性与可靠性,这决定了其生产的数据的准确性和系统的鲁棒性。
要知道,雷达的核心关键则是雷达信号处理,没有稳定的信号,一切融合都是空谈。李建林表示,纳瓦电子对于雷达信号层的处理已经到了相当成熟的阶段。可以保障雷达信号的可靠稳定,实现高质量的数据融合。
而能否解决点云数据处理环节精准的“高度”信息识别,则考验的是一家雷达企业是否具备真正的基本功——天线阵列设计和信号处理算法。
天线阵列设计的关键是把水平与垂直信息相交融的数据处理得更好;垂直面的天线设计需要考虑天线的平坦度、阻抗、信噪比,同时也要抑制水平面的影响。而算法则需要在原来水平面算法的基础上增加垂直面的算法,这是解决俯仰角精度的关键,也是多数友商面临的难点。
基于多年微波天线和算法的积累,纳瓦电子大幅提升了目标检测的置信度和检测范围,同时进化出与激光雷达一样的高密度点云,可带来丰富的感知增强应用;同时可应对更多复杂路况,提高系统融合后的安全性,包括识别较小物体,对遮挡物体、静止物体和横向移动障碍物的检测等。
李建林表示,纳瓦电子目前已经有两款4D毫米波雷达产品拿到了主机厂定点,同时我们会在今年基于4D雷达本身的能力,进一步赋能其域控能力,使其与视觉功能高度融合,实现高可靠低成本的L2+智驾方案。


纳瓦电子5R系统定点海外主机厂
进入2023年,中国车载毫米波雷达市场战火明显升级。
一方面,愈演愈烈的份额抢夺战不仅仅存在于几大传统巨头之间,也快速转移到国产供应商之间。并且来自技术、产品、成本、合作方案等的全方位竞争将变得更加激烈。
无论是传统毫米波雷达赛道市场份额的争夺,还是产品升级周期的抢跑,都在考验每家供应商的速度。
可以看到,伴随国内新车搭载L2级ADAS功能继续保持着高速的增长,5R6V已经成为L2级ADAS系统主流的传感器配置方案。这意味着,相比于此前提供单品雷达的供应商,主机厂更青睐有能力提供全套雷达系统的厂商。
赢在起跑线的纳瓦电子当然深谙主机厂的确切需求,只有提早布局完整产品线才有机会“再上一层楼”。
目前来看,纳瓦电子是国内少有的,同时实现了角雷达、前向毫米波雷达、4D成像毫米波雷达规模化量产的企业。也是极少数有能力交付完整的雷达系统“交钥匙方案”的企业。
要知道,有能力提供全套系统的玩家基本是在行业内扎根已久的外资厂商。他们不仅拥有角雷达、前向雷达等完整的产品线,还可以将整个雷达系统与视觉算法高度融合,为主机厂提供打包式的“交钥匙”方案。而单单是前向雷达,博世、大陆、电装等外资企业依然占据主导地位。这也是他们为什么能够在雷达领域里占据绝大部分市场份额的原因。
值得一提的是,纳瓦电子5R雷达系统已拿下了两家国外车企的定点。可以说,这也是国产力量升级的里程碑。
不过接下来,从国产化替代,到比肩国际一线,甚至实现国产化超越,也成为了国产供应商必须面对的问题。
在产品方面,高性能、高集成度与小型化、低成本将成为核心竞争点。在市场方面,以新势力为代表的国产汽车品牌的车型迭代与功能升级的周期不断压缩,这对于上游方案商而言,技术与产品的迭代速度与研发压力也逐步升级。
只有具备核心技术实力、率先在多场景实现大规模量产验证、有能力快速实现产品创新升级的国产供应商才会在下一个市场周期中快速崛起。
显然,纳瓦电子已经跑在前面。
公司具备上游芯片方案迭代升级、雷达信号处理算法、成本压缩及机器学习、自动化标定等核心技术能力,瞄准的目标是打破国际大厂在雷达领域的技术壁垒和行业垄断,实现智能驾驶核心智能硬件——毫米波雷达国产化的突破。而业界首个4D雷达域的推出以及5R雷达系统的定点,正是纳瓦技术与落地能力最有力的证明。
此外,在芯片平台适配能力上,纳瓦电子已覆盖NXP、TI、加特兰三大主流平台,可灵活适配下游对于价格和性能需求的不断变化。
可以说,在产品升级周期的抢跑方面,纳瓦电子通过了市场考验。