3.5 零极点增益模块
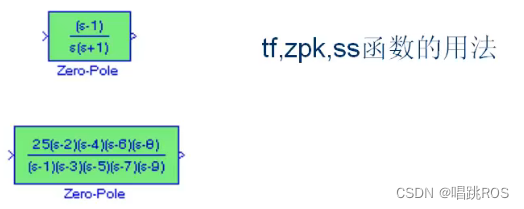
在控制系统设计和分析中,常用的函数包括 传递函数(tf)、零极点(zpk)和状态空间(ss)函数
-
传递函数(tf):用于表示线性时不变系统的输入输出关系,通常以分式函数形式表示。例如,假设有一个系统的传递函数为:
H(s) = (s+1)/(s²+2s+1)
传递函数可以用tf函数表达为:
sys = tf([1 1],[1 2 1])
其中,[1 1]表示分子的系数,[1 2 1]表示分母的系数。sys是一个对象类型,表示传递函数。
-
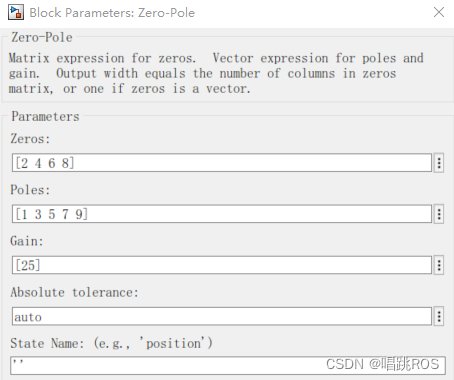
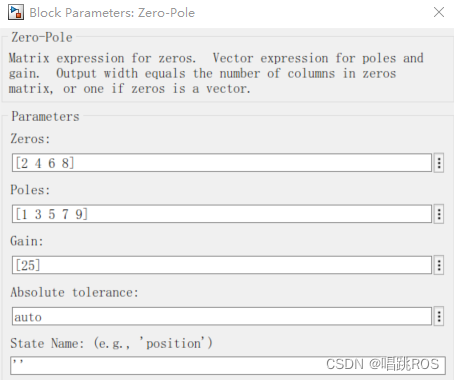
零极点(zpk):用于分析系统的特性,例如系统的稳定性、阻尼比等。zpk函数接受三个向量参数,分别表示系统零点、极点和增益。例如,下面的代码用zpk函数创建了上述传递函数的系统对象:
sys_zpk = zpk([-1], [-1 -1], 1)
其中,-1表示系统的零点,[-1 -1]表示系统的极点,1表示系统的增益。sys_zpk是一个对象类型,用于表示系统的零极点。
-
状态空间(ss):用于表示系统的状态方程。这种表示方法更加通用,在多变量系统中尤其有用。例如,下面的代码用ss函数创建了一个简单的状态空间模型:
A = [-1 0; 0 -2]
B = [1; 1]
C = [1 0]
D = [0]
sys_ss = ss(A,B,C,D)其中,A表示系统的状态转移矩阵,B表示输入矩阵,C表示输出矩阵,D表示直接传递矩阵。sys_ss是一个对象类型,表示状态空间模型。
这些函数在控制系统设计和分析中经常用到,需要根据实际情况选择相应的函数并熟练掌握其用法。
例子:
3.6 PID及二阶积分模块
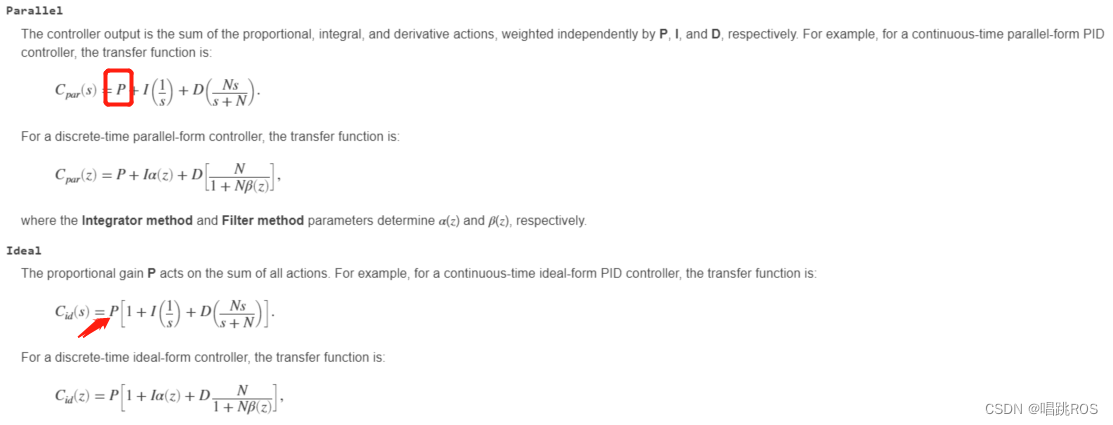
1.离散时间或连续时间PID控制器
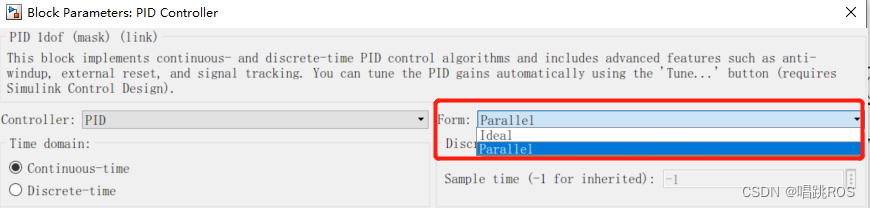
主要是P的位置不一样
2.离散时间或连续时间两自由度PID控制器

仅供参考:
在Simulink中,两自由度PID控制器是一种基于PID控制算法的高级控制器,可以用来控制具有复杂特性(如不稳定、延迟、多变量等)的系统。两自由度PID控制器包含两个控制回路,分别对应系统的位置控制和速度控制,从而改善系统的响应速度、稳定性和精度。
-
b参数通常称为速度环的回路增益(loop gain),是指速度环响应的增益系数,用于调节速度环的响应速度和抑制高频干扰。增大b的值可以增强速度环的相位裕度和增益裕度,提高速度环的带宽和稳定性,但会导致速度环的超调量和响应时间增加。
-
c参数通常称为位置环的补偿(compensation),是指位置环响应的补偿系数,用于对位置环进行补偿,消除稳态误差和提高跟踪精度。增大c的值可以增强位置环的相位裕度和增益裕度,提高位置环的带宽和静态误差补偿能力,但会导致位置环的超调量和响应时间增加。
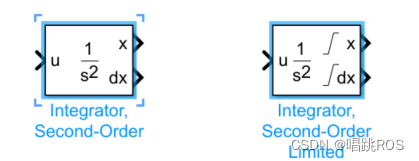
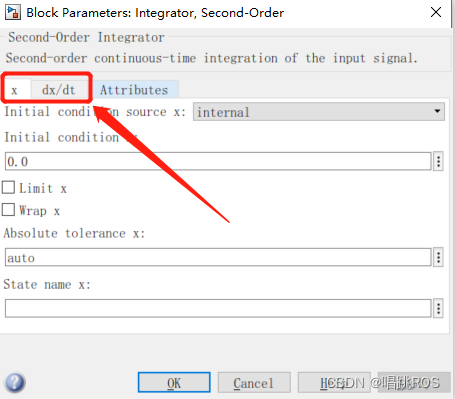
3.二阶积分模块
3.7 几种延迟模块
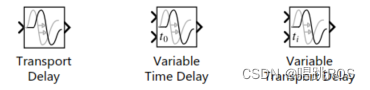
在 Simulink 中常用的三种延迟模块分别是 Transport Delay、Variable Time Delay 和 Variable Transport Delay。
-
Transport Delay(时移模块):此模块可以模拟一个具有固定延时的线性系统,例如传输线、数字滤波器等等。Transport Delay 通过设置 delay 时间参数来实现固定的延迟,同时可以调整 delay 类型来选择连续或离散延迟的处理方式。
-
Variable Time Delay(可变时间延迟模块):此模块能够模拟一个可变的延迟效果,可以自由控制延迟的大小和类型,以及处理延迟信号时的方式(如线性内插、分段内插等)。Variable Time Delay 通常用于处理各种非线性系统、滞后系统、时变系统等等。
-
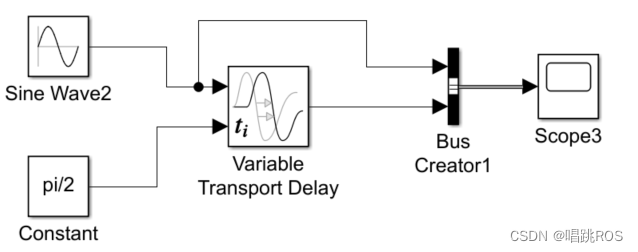
Variable Transport Delay(可变时移模块):此模块是 Transport Delay 和 Variable Time Delay 的结合体,不仅可以模拟固定延迟的效果,还可以自由控制延迟的大小和类型,实现连续和离散延迟的处理方式,同时实现可变延迟的应用场景。
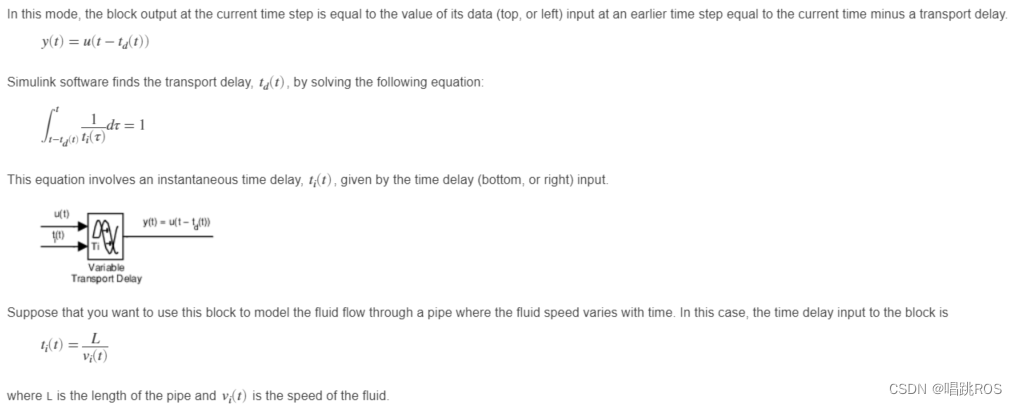
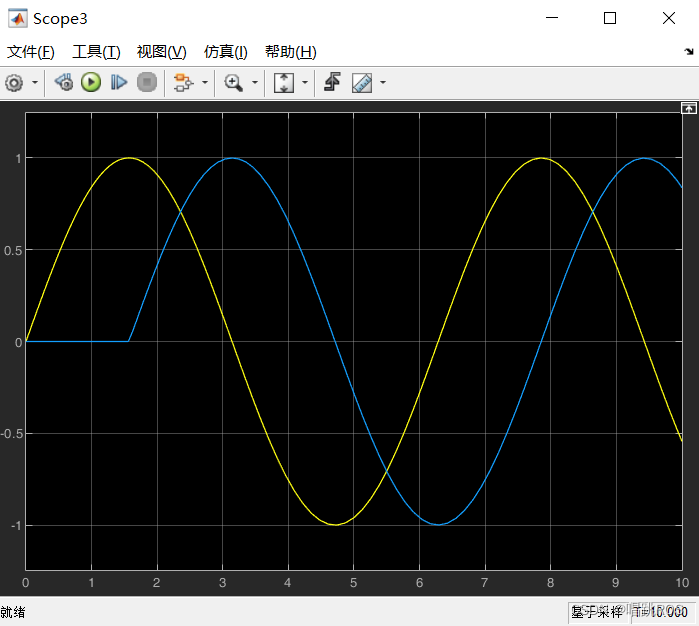
Variable Transport Delay:
在这种模式下,当前时间步长处的块输出等于其在较早时间步长处输入的数据(顶部或左侧)的值,该较早时间步长等于当前时间减去传输延迟。