EU 2021-646是做什么的?
EU 2021-646全称为关于机动车紧急车道保持系统(ELKS)型式认证统一程序和技术规范,其中主要描述了对认证ELKS系统所需的功能要求及性能要求
基本要求
1.应急车道保持系统(ELKS)应包括车道偏离警告系统(LDWS)和纠正方向控制功能(CDCF)
2.该系统的设计应尽量减少对驾驶员预期操作的警告和干预
功能要求
故障警告
1.当ELKS出现故障而无法满足本法规要求时,应发出警告
2.故障警告应为持续的视觉警告信号
3.在每次ELKS自检(一种集成功能,至少在系统激活时连续检查系统故障)之间不应有明显的时间间隔,随后在电气可检测故障的情况下,警告信号的点亮不应有延迟
4.一旦检测到任何非电气故障情况(例如传感器未对准),应激活警告信号
5.如果车辆配备了停用ELKS的装置,则应在停用系统时发出警告,这应是一个持续的视觉警告信号。可沿用故障警告信号
停用系统
手动停用
当车辆配备有部分或全部手动停用ELKS功能的装置时,以下条件应适用:
——每次激活车辆主控制开关时,应自动完全恢复完全ELKS功能
——手动停用全ELKS不得少于两个故意动作,例如按住按钮或选择并确认菜单选项。应能够容易地抑制LDWS的声音警告,但该动作不得同时使LDWS或CDCF失效
自动停用
如果车辆配备了部分或全部自动停用ELKS功能的装置,例如在越野使用、被牵引、拖车挂接至车辆或电子稳定控制(ESC)停用的情况下,应适用以下条件:
——作为安全审计的一部分,车辆制造商应提供ELKS功能自动停用的情况列表和相应标准,并将其附在测试报告中
——一旦导致自动停用的条件不再存在,ELKS功能应自动完全重新激活
——持续的视觉警告信号应告知驾驶员ELKS功能已停用。故障警告信号可用于此目的
自动抑制
1.作为安全审计的一部分,制造商应提供一个文件包,该文件包提供系统的基本设计和逻辑,以检测驾驶员可能的意图操纵和ELKS的自动抑制。该包应包括检测到的参数列表,以及用于决定系统应被抑制的方法的基本描述,包括可能的极限值。对于CDCF和LDWS,技术服务部门应评估文件包,以表明驾驶员在车道保持测试参数(特别是横向偏离速度)范围内的无意操纵不会导致系统自动抑制
2.当其他驾驶员辅助或自动转向功能(即自动指令转向功能、紧急转向功能或自动车道保持),正在控制车辆的横向运动或其他安全相关功能(即能够改变车辆的动态行为,如AEBS、ESC等)正在干预。这些情况应由制造商声明,作为安全审计的一部分
LDWS要求
速度范围
LDWS应至少在65 km/h至130 km/h之间的车辆速度范围内(或最大车辆速度,如果低于130 km/h)和所有车辆负载条件下激活
车道偏离警告
当在规定的速度范围内激活和操作时,如果车辆越过其行驶的车道的可见车道标记,LDWS应能够最迟警告驾驶员超过–0.3 m的DTLM:
a) 横向偏离速度范围为0.1 m/s至0.5 m/s;
b) 在笔直、平坦和干燥的道路上
c) 符合联合国欧洲经济委员会(UNECE)第130号法规附件3(可见车道标志标识)中所述的实线和虚线车道标志
d) 标记状态良好,材料符合该缔约方的可见标记标准
e) 在所有照明条件下,无传感器致盲(如阳光直接致盲),必要时激活近光(近光灯)前照灯
f)在没有影响车道标线可见度的天气条件下(如无雾)
LDWS警告指示
1.视觉之外的听觉和触觉的至少两个警告装置;或
2.一个报警装置不具有触觉和声学,具有关于车辆意外漂移方向的空间指示
3.当存在指示意图离开车道的驾驶员动作时,可以抑制上述警告
4.当视觉信号用于车道偏离警告时,可使用故障警告信号以闪烁模式
5.当CDCF进行车道保持干预时,应将其视为触觉警告
6.LDWS视觉警告信号应在车辆主控制开关“电源开启”后激活
7.LDWS视觉警告信号即使在白天也应可见
CDCF要求
速度要求
CDCF应至少在70 km/h至130 km/h(或最大车速,如果低于130 km/h)之间以及在所有车辆负载条件下激活。但是,如果车辆速度从70 km/h以上降至70 km/h以下,则系统应至少激活,直到车辆速度降至65 km/h以下。
车道保持
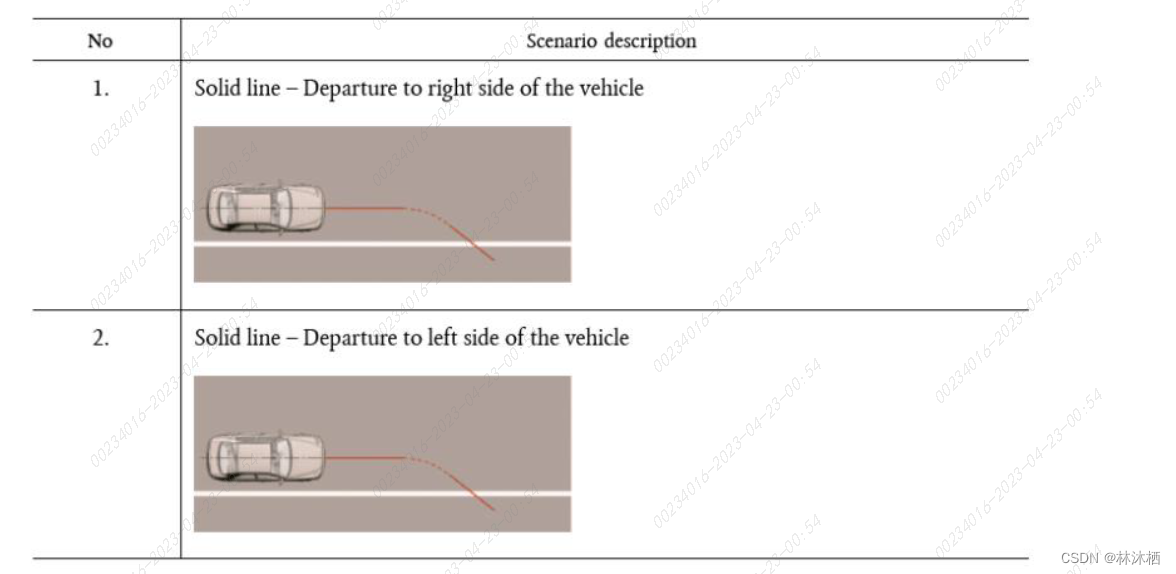
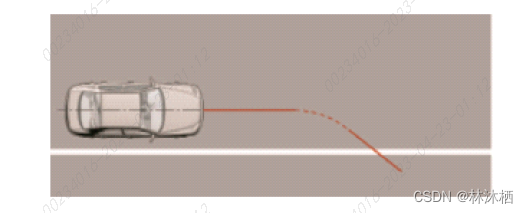
在下表所示的情况下,不存在导致系统停用或抑制的条件下,CDCF应能够在最晚–0.3 m的DTLM时来阻止越过可见车道标记的车道偏离
a)对于速度在100 km/h以上的车辆,侧向偏离速度在0.2 m/s至0.5 m/s之间;对于速度在100km/h以上且在130 km/h以下的车辆,横向偏离速度在0.2 m/s至0.3 m/s之间(或最大车速,如果低于130 km/h);
b)在笔直、平坦和干燥的道路上
c)符合联合国第130号法规附件3(可见车道标志标识)中所述的实心车道标志
d)标记状态良好,材料符合该缔约方的可见标记标准
e)在所有照明条件下,无需遮挡传感器(如直接遮挡阳光),必要时激活近光(近光灯)前照灯
f)如果没有影响车辆动态性能的天气条件(例如,无风暴,不低于5°C)或车道标线的能见度(例如,没有雾)
转向超越控制
1.超控系统提供的方向控制所需的转向控制力不得超过50 N。一旦超控,转向支持的显著损失不得突然发生。
2.对于不作用于转向本身的CDCF系统(例如,差速制动型CDCF),转向输入不得超过25度
CDCF警告指示
1.每个CDCF干预应立即通过视觉警告信号显示给驾驶员,该视觉警告信号至少显示1秒或只要干预存在,以较长时间为准。视觉信号可以是故障警告信号的闪烁。
2.如果干预时间超过10秒,则应在干预结束前发出声音警告信号,除非驾驶员有离开车道的意图
3.如果在180秒的滚动间隔内连续进行两次或多次干预,并且在该干预期间驾驶员没有转向输入,则系统应在180秒滚动间隔内的第二次和任何进一步干预期间提供声音警告信号。从第三次干预(以及随后的干预)开始,声音警报信号应持续至少10秒,比之前的警报信号长
测试要求
LDWS测试要求
视觉报警信号验证测试
车辆静止时,检查视觉警告信号是否符合要求【见LDWS警告指示】
车道偏离警告测试
1.以70 km/h+/-3 km/h的速度平稳驾驶车辆进入测试车道中心,以确保车辆姿态稳定。保持规定速度,以0.1至0.5 m/s的横向偏离速度轻轻向左或向右移动车辆,使车辆越过车道标线。以0.1和0.5 m/s范围内的不同偏离率重复试验。沿相反方向重复上述测试
2.如果LDWS最迟在DLTM为-0.3 m时提供车道偏离警告指示,则满足测试要求
手动停用测试
1.如果车辆配备了手动停用ELKS(LDWS)的装置,则将车辆主控制开关转到“通电”位置并停用ELKS。应激活停用警告信号
2.将主控制开关转到“电源关闭”位置,将车辆主控制开关转到“电源开启”位置,并确认先前激活的警告信号是否重新激活,从而表明ELKS(LDWS)已按照规定恢复
CDCF的测试要求
警告指示测试
1.应使用激活的CDCF在车道至少一侧有实心车道标记的道路上驾驶目标车辆
2.测试条件和目标车辆测试速度应在系统的工作范围内
3.测试期间,应记录CDCF干预的持续时间以及视觉和声音警告信号的持续时间
4.应驾驶目标车辆,使其试图离开车道,并使CDCF干预保持10秒以上。如果由于试验设施的限制而无法实际实现此类试验,则在型式认证机构的同意下,可通过使用文件来满足此要求
5.如果在干预开始后不迟于10秒提供声音警告,则满足测试要求
6.驾驶目标车辆使该车辆试图离开车道,并在180秒的滚动间隔内至少对系统进行三次干预:
a)只要干预存在,就为每个干预提供视觉警告信号
b)在第二和第三介入处提供声音警告信号
c)第三介入处的声警报信号比第二介入处的声音警报信号长至少10s
转向超越测试
1.应使用激活的CDCF在道路上驾驶主体车辆,车道两侧有实心车道标记
2.测试条件和目标车辆测试速度应在系统的工作范围内
3.驾驶车辆时,车辆应试图离开车道并引起CDCF干预。在干预期间,驾驶员应施加必要的转向控制力,以超越干预
4.应记录驾驶员在转向控制装置上施加的力和转向输入,以超越干预
5.如果满足以下条件,则满足测试要求:
a)驾驶员施加在转向控制装置上以超越干预的力不超过50 N
b)一旦CDCF被覆盖,不会突然失去重要的转向支持
c)对于不作用于转向本身的ELKS(例如,CDCF型差速制动),转向输入不超过25度
车道保持测试
1.应驾驶一条试验路径,该路径包括一条平行于被测实线车道标记的初始直线路径,然后是一条固定半径曲线,以向目标车辆施加已知的横向速度和偏航,然后是没有任何力施加在转向控制装置上的直线路径(例如,将手从转向控制装置移开)
2.所有情况下的测试均应以0.2 m/s和0.5 m/s的横向速度进行
3.试验期间至系统干预点的目标车辆速度应为72 km/h+/-1 km/h
4.为应用所需横向速度而驱动的固定半径曲线的半径应为1200m或更大
5.所需的横向速度应达到+/-0,05 m/s的公差
6.车辆制造商应提供信息,说明待行驶弯道的半径以及闭环路径和/或速度控制结束时的位置,以确保自由漂移,从而不会干扰自动抑制
7.如果目标车辆未通过超过-0.3m的DTLM穿过车道标记,则满足试验要求