- 开发自主可控智能网联汽车操作系统的必要性
当下,传统汽车操作系统行业的核心技术几乎由国外的黑莓、谷歌、风河、Vector、ETAS等垄断。操作系统已成为我国智能网联汽车发展过程中的关键卡脖子技术,开发自主可控的智能网联汽车操作系统势在必行。
- 操作系统简介及演进
《车载智能计算基础平台参考架构1.0》白皮书中定义智能网联汽车操作系统是由系统软件和功能软件组成的整体基础框架软件。
 图1车载智能计算基础平台参考架构
图1车载智能计算基础平台参考架构
伴随着自动驾驶从L1—L5的发展历程,汽车正向着智能化、网联化方向发展,电子电器架构也逐步向域控制器、中央控制器演化,原来各子ECU的功能进一步集成到了域控制器或车载计算机中。汽车操作系统也由单纯的车控操作系统逐步向多核CPU、多内核OS模式发展。
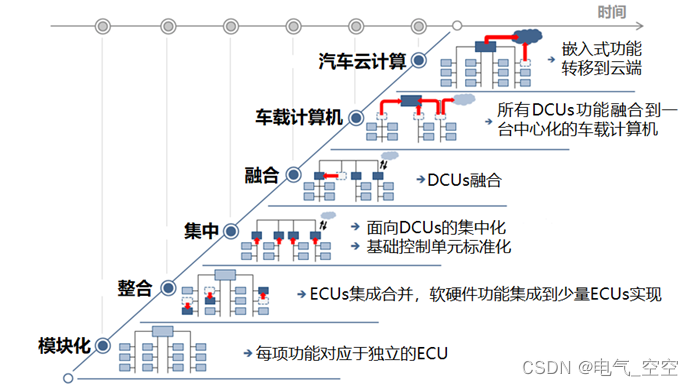
图2 电子电器架构演进趋势
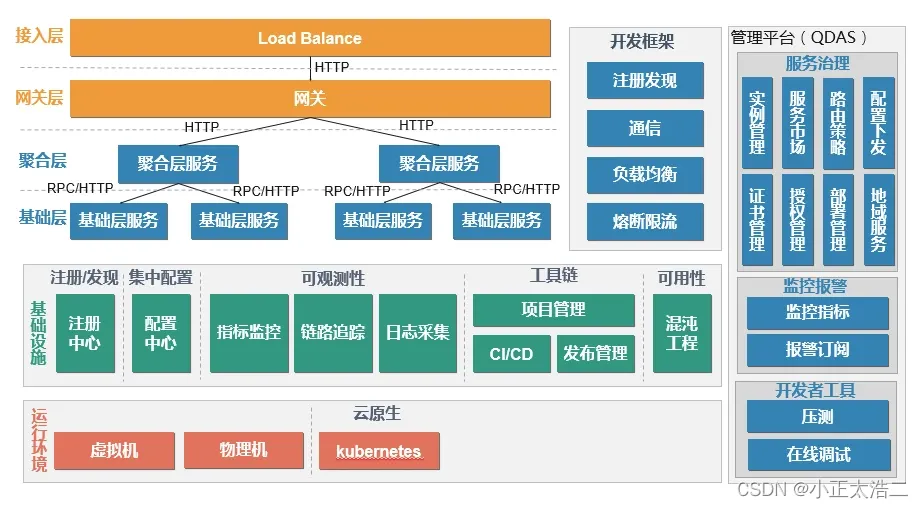
智能网联汽车操作系统在异构分布硬件/芯片组合上同时运行有多个/多种内核OS。其中,AI单元上运行着内核OS(一般用Linux);计算单元由多个多核CPU组成,通过hypervisor同时运行着多个/多种内核OS;控制单元上加载有CP-AUTOSAR平台基础软件。
红色框线:系统软件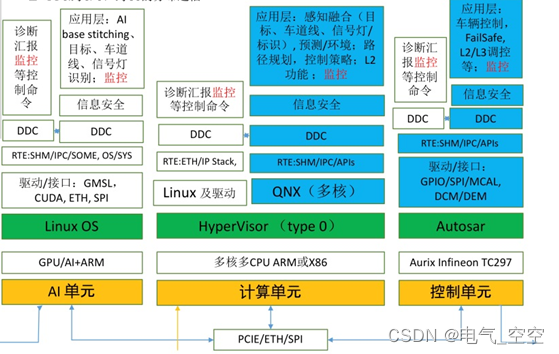
图3 多个/多种操作系统并行框架
系统软件是整个操作系统的核心开发内容,包括内核系统、虚拟化软件和中间件等。内核系统主要种类有Linux、QNX、Vxworks等;虚拟化软件主要包括hypervior,它可以支持多个内核OS同时运行;中间件主要包括AUTOSAR。随着汽车操作系统的不断演进,系统软件也逐步由“单内核OS+中间件”的形式发展到了如今“多平台+hypervisor+多内核OS”的形式。
- 自主可控操作系统技术路线
围绕智能汽车产业需求和行业应用,以自主可控智能网联汽车操作系统为研发目标,提出我国智能网联汽车操作系统开发技术路线如下:

图4 自主可控操作系统技术路线
第一阶段:2021—2024,基于“定制化Linux内核”的方式进行开发,达到功能安全ASIL B等级,与此同时开展操作系统“自主微内核”的基础性研究;
第二阶段:2024—2026,持续优化“Linux”,深耕“自主微内核开发”,功能安全达到ASIL D等级,最终完成操作系统的开发。
(1)内核开发
基于“定制化Linux”开发内核,对现有Linux内核进行深度裁剪,并采用虚拟化+Linux的方式从系统的角度解决功能安全问题,达到功能安全ASIL B等级,国内中标麒麟、中兴、百度等均已在此方向做了开发。
基于“自主微内核”开发,可完全实现智能网联操作系统的自主可控,并可满足功能安全ASIL D等级,完全具备中国自主知识产权,意义重大。
(2)功能软件开发
开发自动驾驶通用框架模块、网联模块和云控模块等核心共性模块。
(3)系统软件开发
①中间件开发:当前AP-AUTOSAR标准建设还不全面,可先按AUTOSAR架构进行开发,并结合中国智能网联汽车的特殊要求,开发出中国方案版的AUTOSAR(参考日本Jasper模式)。当前国内东软睿驰、普华已基于AP-AUTOSAR开发中间件产品。
②hypervisor开发:采用全虚拟化技术路线,基于硬件辅助虚拟化机制,开发具备高安全性、高实时性和高可靠性的Hypervisor,支持现存的多种OS及应用如Linux/安卓等生态。
- 自主可控操作系统生态建设
截至2020年,中国汽车保有量已超过3.7亿辆,年产销量已突破2000万辆,这为自主可控操作系统的产业化落地提供了巨大的市场机遇;同时面对产业上下游资源整合带来的挑战,需要依托国家部委的引导和支持,发挥“集中力量办大事”的举国体制的优势,推动建设智能网联汽车操作系统的应用生态。同时,为实现操作系统技术的可持续发展,智能网联操作系统必须在自身推广、构建生态的过程中执行开源免费的策略。
- 工具链开发
智能网联汽车操作系统的研发需要开发全栈工具链提升开发效率。需开发可视化开发工具、集成工具、仿真工具、调试工具和测试工具,形成完全具有自主知识产权的工具链体系。开发工具要采用C++/Web等完全开源不涉及知识产权的语言。