论文信息
题目:
Optimization RGB-D 3-D Reconstruction Algorithm Based on Dynamic SLAM
基于动态SLAM的RGB-D三维重建算法优化
论文地址:
https://ieeexplore.ieee.org/abstract/document/10050782
发表期刊:
IEEE Transactions on Instrumentation and Measurement ( Volume: 72)
标签
几何+深度学习、动态特征点剔除、特征点重提取
摘要
为实现智能机器人动态环境下的SLAM系统建图,在动态分割框架DynaSLAM的基础上,提出一种鲁棒的动态特征分割SLAM三维重建算法。该算法采用特征点重提取的方法来解决原始特征点数量不足的问题。在预处理阶段,设计了优化的极线几何模型,并与Mask R-CNN联合进行图像分割。在点云后处理阶段,利用核主成分分析(PCA)进行降噪处理,然后设计基于八叉树的动态滤波方法进行进一步处理。这种处理有效地消除了额外的动态异常值。在TUM和Bonn数据集上的实验结果表明,该算法在高动态环境下比DynaSLAM算法取得了10%以上的姿态估计精度提升,并优于目前最先进的(SOTA)算法。
内容简介
本文提出了一种动态滤波点云优化稠密重建算法。提高了动态环境下位姿估计的准确性,减少了重建模型中残留的动态特征。下面是本文最重要创新的总结:
1)对Mask R-CNN和多视图几何分割得到的图像进行特征点重提取,增加有效特征点的数量。利用关键帧进行三维重建,更新三维模型。
2)利用对极几何和高斯分布概率模型,设计多视角几何方法,以提高判断的准确性和动态分割效果。
3)采用核主成分分析(PCA)和八叉树模型调节的统计滤波,消除离群点云,分割动态特征点并滤除其他噪声点
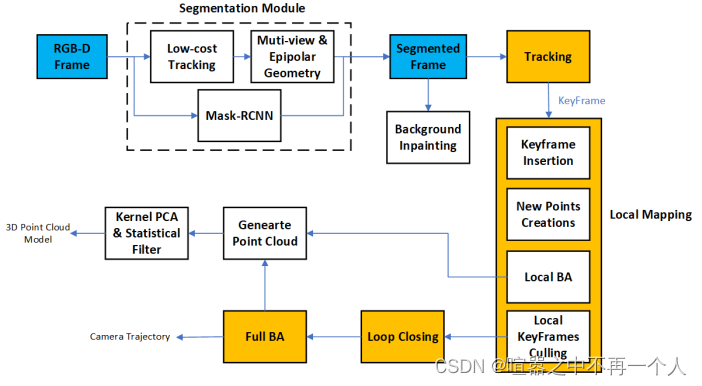
首先,利用Mask R-CNN对每帧RGB图像中潜在的动态对象(主要是人)进行分割;
同时,对分割后的像素点采用膨胀法进行放大。
同时,采用一种低成本的跟踪方法获得摄像机的近似位姿。
然后,利用投影误差参考关键帧检测动态点;然后,通过深度学习方法和多视图几何分割方法得到掩模,并根据掩模去除深度图像对应的深度信息;
对于去除动态信息的帧,再次提取特征点;利用特征点重新训练词袋模型,构建新的词汇树。
在此基础上,构建当前帧,计算相机位姿以生成地图。在构建图的过程中,对当前点云进行下采样后,首先利用核PCA进行闪烁,然后利用八叉树方法进行统计滤波,去除动态特征。这个过程可以进一步过滤几个剩余的动态特征。
评价
该文提出了一套动态SLAM和三维重建优化算法。该算法继承ORB SLAM2的位姿估计和后端优化框架,借鉴并增强了DynaSLAM动态分割算法,设计了一种基于极线几何模型的多视角几何方法,增强了动态分割性能。采用特征点重提取来解决特征丢失问题。利用核PCA和八叉树模型调节的统计滤波,对点云进行筛选优化,剔除外部点,从而降低噪声。所提算法在多个动态数据集的映射中表现出良好的准确性和稳定性。适合在复杂的动态环境中运行。然而,该算法仍然存在问题。现有的深度学习框架结合多角度几何方法在动态特征不明显和无法完全过滤的情况下是无效的,需要开发更鲁棒的未来深度学习框架或新的分割技术。所提算法的速度也有待提高。
阅读启发
该文章利用几何方法和深度学习的方法滤除动态特征点,然后对滤除的图像进行特征重提取,解决了滤除后特征的点少的问题,这是我理解到的创新思路,由于刚入门slam,许多理论上的知识还不懂,可能会有一些理解不到位的地方。
总的来说,该论文的创新点比较新颖,采用特征点重提取的方法值得借鉴,