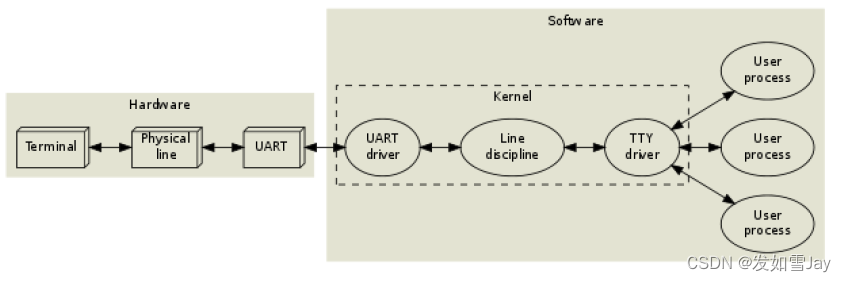
在Linux系统中,操作设备的统一接口就是:open/ioctl/read/write。
对于UART,又在ioctl之上封装了很多函数,主要是用来设置行规程。
所以对于UART,编程的套路就是:
- 使用
open函数打开串口 - 设置行规程,比如波特率、数据位、停止位、检验位、RAW模式、一有数据就返回
read/write数据
1. 打开串口
由于串行端口是一个文件,因此使用open(2)函数来访问它。C语言代码示例如下。
1.1 示例
#include <stdio.h> /* 标准输入/输出定义 */
#include <string.h> /* 字符串函数定义 */
#include <unistd.h> /* UNIX标准函数定义 */
#include <fcntl.h> /* 文件控制定义 */
#include <errno.h> /* 错误号定义 */
#include <termios.h> /* POSIX终端控制定义 */
// 成功时返回文件描述符,错误时返回-1。
int open_port(void){
int fd; /* 端口的文件描述符 */
fd = open("/dev/ttyf1", O_RDWR | O_NOCTTY | O_NDELAY);
if (fd == -1){// 打开端口失败
perror("open_port: Unable to open /dev/ttyf1 - ");
}
else
fcntl(fd, F_SETFL, 0);
return (fd);
}
其他系统可能需要相应的设备文件名,但除此之外代码是相同的。
1.2 open函数的标志位
当我们打开设备文件时,我们使用了另外两个标志以及读+写模式:
fd = open("/dev/ttyf1", O_RDWR | O_NOCTTY | O_NDELAY);
其中,
- O_NOCTTY :表示告诉操作系统,应用程序(进程)打开串口之后,不要把程序当作控制终端。如果指定这一点,那么任何输入(如键盘中止信号等)都将影响进程。
- O_NDELAY:表示告诉操作系统,应用程序(进程)不关心DCD信号线的状态,即不关心端口的另一端是否启动并运行。如果没有指定这个标志,进程将被置于休眠状态,直到DCD信号线是空间电压。
2. 配置串口
配置串口也就是设置行规程,行规程的参数用结构体struct termios来表示。设置行规程就是设置该结构体中成员的值。
2.1 结构体struct termios
结构体struct termios定义如下:
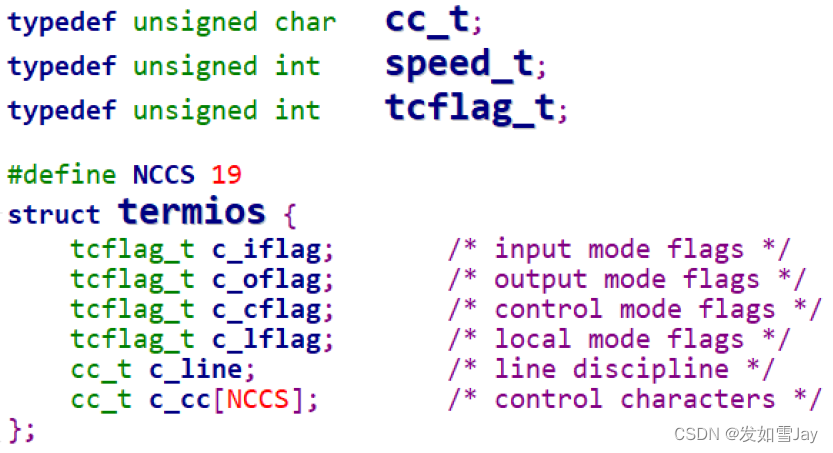
struct termios{
unsigned short c_iflag; /* 输入模式标志*/
unsigned short c_oflag; /* 输出模式标志*/
unsigned short c_cflag; /* 控制模式标志*/
unsigned short c_lflag; /* 区域模式标志或本地模式标志或局部模式*/
unsigned char c_line; /* 行控制line discipline */
unsigned char c_cc[NCC]; /* 控制字符特性*/
};
2.2 struct termios作用
struct termios被用来提供一个健全的线路设置集合, 如果这个端口在被用户初始化前使用. 驱动初始化这个变量使用一个标准的数值集, 它拷贝自 tty_std_termios 变量. tty_std_termos 在 tty 核心被定义为:
struct termios tty_std_termios = {
.c_iflag = ICRNL | IXON;
.c_oflag = OPOST | ONLCR;
.c_cflag = B38400 | CS8 | CREAD | HUPCL;
.c_lflag = ISIG | ICANON | ECHO | ECHOE | ECHOK | ECHOCTL | ECHOKE | IEXTEN;
.c_cc = INIT_C_CC;
};
这个 struct termios 结构用来持有所有的当前线路设置,给这个 tty 设备的一个特定端口。这些线路设置控制当前波特率。数据大小。数据流控设置。以及许多其他值。
2.3 struct termios成员介绍
2.3.1 c_iflag标志常量:Input mode ( 输入模式)
输入模式成员c_iflag控制对端口上接收到的字符所做的任何输入处理。c_iflag中存储的最终值由下表中选项的按位或。
| 常量 | 描述 |
|---|---|
| INPCK | 启用奇偶校验 |
| IGNPAR | 忽略奇偶校验错误 |
| PARMRK | 标记奇偶校验错误 |
| ISTRIP | 去掉奇偶校验位 |
| IXON | 启用输出的 XON/XOFF 流控制 |
| IXOFF | 启用输入的 XON/XOFF 流控制 |
| IXANY | (不属于 POSIX.1;XSI) 允许任何字符来重新开始输出 |
| IGNBRK | 忽略输入中的 BREAK 状态。 (忽略命令行中的中断) |
| BRKINT | 当检测到中断条件时发送SIGINT |
| INLCR | 将输入中的 NL 翻译为 CR。(将收到的换行符号转换为Return) |
| IGNCR | 忽略输入中的回车 |
| ICRNL | 将输入中的回车翻译为新行 (除非设置了 IGNCR)(否则当输入信号有 CR 时不会终止输入) |
| IUCLC | (不属于 POSIX) 将输入中的大写字母映射为小写字母 |
| IMAXBEL | (不属于 POSIX) 当输入队列满时响零。Linux 没有实现这一位,总是将它视为已设置 |
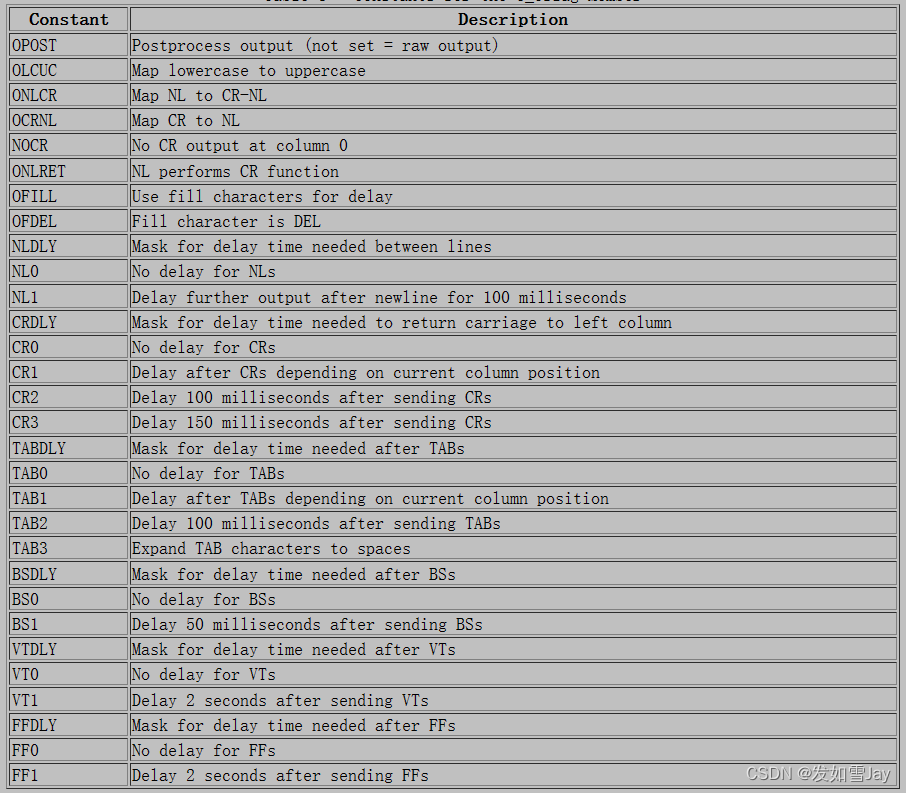
2.3.2 c_oflag 标志常量: Output mode ( 输出模式)
c_oflag成员包含输出过滤选项。与输入模式一样,您可以选择已处理或原始数据输出。c_oflag 中存储的最终值由下表中选项的按位或。
| 常量 | 描述 |
|---|---|
| OPOST | 启用具体实现自行定义的输出处理(未设置=原始输出) |
| OLCUC | (不属于 POSIX) 将输出中的小写字母映射为大写字母 |
| ONLCR | (XSI) 将输出中的新行符映射为回车-换行 |
| OCRNL | 将输出中的回车映射为新行符 |
| ONOCR | 不在第 0 列输出回车 |
| ONLRET | 不输出回车 |
| OFILL | 发送填充字符作为延时,而不是使用定时来延时 |
| OFDEL | (不属于 POSIX) 填充字符是 ASCII DEL (0177)。如果不设置,填充字符则是 ASCII NUL |
| NLDLY | 新行延时掩码。取值为 NL0 和 NL1 |
| CRDLY | 回车延时掩码。取值为 CR0, CR1, CR2, 或 CR3 |
| BSDLY | 回退延时掩码。取值为 BS0 或 BS1。(从来没有被实现过) |
| VTDLY | 竖直跳格延时掩码。取值为 VT0 或 VT1 |
| IUCLC | (不属于 POSIX) 将输入中的大写字母映射为小写字母 |
| FFDLY | 进表延时掩码。取值为 FF0 或 FF1 |
更多选项如下图所示:
一般有两种输出模式可供选择:
(1)选择已处理输出
通过在c_oflag成员中设置OPOST选项来选择处理后的输出:
options.c_oflag |= OPOST;
在所有不同的选项中,目前只能使用ONLCR选项,它将换行符映射为CR-LF对。其余的输出选项主要是历史上的,可以追溯到行打印机和终端无法跟上串行数据流的时候。
(2)选择原始输出
通过重置c_oflag成员中的OPOST选项来选择原始输出:
options.c_oflag &= ~OPOST;
当OPOST选项被禁用时,c_oflag中的所有其他选项位都会被忽略。
2.3.3 c_cflag 标志常量: Control mode ( 控制模式)
c_cflag成员控制波特率、数据位数、奇偶校验、停止位和硬件流控制。所有支持的配置都有常量。
c_cflag中存储的最终值由下表中选项确定。
| 常量 | 描述 |
|---|---|
| CBAUD | (不属于 POSIX) 波特率掩码 (4+1 位) |
| OLCUC | (不属于 POSIX) 扩展的波特率掩码 (1 位),包含在 CBAUD 中 |
| CSIZE | 字符长度掩码(传送或接收字元时用的位数)。取值为 CS5(传送或接收字元时用5bits), CS6, CS7, 或 CS8 |
| CSTOPB | 设置两个停止位,而不是一个 |
| CREAD | 打开接受者 |
| PARENB | 允许输出产生奇偶信息以及输入的奇偶校验(启用同位产生与侦测) |
| PARODD | 输入和输出是奇校验(使用奇同位而非偶同位) |
| HUPCL | 在最后一个进程关闭设备后,降低 modem 控制线 (挂断) |
| CLOCAL | 忽略 modem 控制线 |
| LOBLK | (不属于 POSIX) 从非当前 shell 层阻塞输出(用于 shl ) |
| CIBAUD | (不属于 POSIX) 输入速度的掩码。CIBAUD 各位的值与 CBAUD 各位相同,左移了 IBSHIFT 位 |
| CRTSCTS | (不属于 POSIX) 启用 RTS/CTS (硬件) 流控制 |

c_cflag成员包含两个应该始终启用的选项,CLOCAL和CREAD。这将确保您的程序不会成为端口的“所有者”,受到零星的作业控制和挂起信号的影响,并且串行接口驱动程序将读取传入的数据字节。
不要直接初始化c_cflag(或任何其他标志)成员。应该始终使用按位的AND、OR和NOT操作符来设置或清除成员中的位。不同的操作系统版本可以以不同的方式使用位,因此使用位操作符将防止破坏新串行驱动程序中所需的位标志。
2.3.4 c_lflag 标志常量: Local mode ( 局部模式)
本地模式成员c_lflag控制串口驱动程序如何管理输入字符。通常,将为规范或原始输入配置c_lflag成员。c_cflag中存储的最终值由下表中选项确定。
| 常量 | 描述 |
|---|---|
| ISIG | 使能SIGINTR、SIGSUSP、SIGDSUSP和SIGQUIT信号 |
| ICANON | 启用规范化输入(否则为raw) |
| XCASE | (不属于 POSIX; Linux 下不被支持) 如果同时设置了 ICANON,终端只有大写。输入被转换为小写,除了有前缀的字符。输出时,大写字符被前缀(某些系统指定的特定字符) ,小写字符被转换成大写。 |
| ECHO | 启用输入字符的回显 |
| ECHOE | 如果同时设置了 ICANON,字符 ERASE 擦除前一个输入字符,WERASE 擦除前一个词 |
| ECHOK | 如果同时设置了 ICANON,字符 KILL 删除当前行 |
| ECHONL | 如果同时设置了 ICANON,回显字符 NL,即使没有设置 ECHO |
| NOFLSH | 禁止在产生 SIGINT, SIGQUIT 和 SIGSUSP 信号时刷新输入和输出队列,即关闭queue中的flush |
| IEXTEN | 启用扩展功能 |
| ECHOCTL | 如果同时设置了 ECHO,除了 TAB, NL, START, 和 STOP 之外的 ASCII 控制信号被回显为 ^X, 这里 X 是比控制信号大 0x40 的 ASCII 码。例如,字符 0x08 (BS) 被回显为 ^H |
| ECHOPRT | 如果同时设置了 ICANON 和 IECHO,字符在删除的同时被打印 |
| CRTSCTS | (不属于 POSIX) 启用 RTS/CTS (硬件) 流控制 |
一般有两种输入模式可供选择:
(1)选择规范输入
规范输入是面向行的。输入字符被放入缓冲区,用户可以交互地编辑缓冲区,直到收到CR(回车)或LF(换行)字符。
当选择此模式时,通常选择ICANON、ECHO和ECHO选项:
options.c_lflag |= (ICANON | ECHO | ECHOE);
(2)选择原始输入
原始输入未经处理。当接收到输入字符时,它们将完全按照接收到的方式传递。通常,当使用原始输入时,您将取消选择ICANON, ECHO, ECHOE和ISIG选项:
options.c_lflag &= ~(ICANON | ECHO | ECHOE | ISIG);
2.3.5 c_cc 数组:特殊控制字元
UNIX串行接口驱动程序提供了指定字符和数据包超时的能力。c_cc数组中的两个元素用于超时:VMIN和VTIME。在规范输入模式下或通过open或fcntl在文件上设置NDELAY选项时,会忽略超时。
VMIN指定要读取的最小字符数。如果设置为0,则VTIME值指定等待读取每个字符的时间。请注意,这并不意味着对N个字节的读取调用将等待N个字符进入。相反,超时将应用于第一个字符,read调用将返回立即可用的字符数(最多可达您请求的字符数)。
如果VMIN不为零,则VTIME指定等待读取第一个字符的时间。如果在给定的时间内读取一个字符,则任何读取将阻塞(等待),直到读取所有VMIN字符。也就是说,一旦读取了第一个字符,串行接口驱动程序期望接收整个字符包(VMIN字节总数)。如果在允许的时间内没有读取任何字符,则调用read返回0。此方法允许您告诉串行驱动程序您需要恰好N个字节,并且任何读调用将返回0或N个字节。然而,超时只适用于第一个字符读取,所以如果由于某种原因驱动程序错过了N字节包中的一个字符,那么read调用可能会永远阻塞,等待额外的输入字符。
VTIME指定等待传入字符的时间,以十分之一秒为单位。如果VTIME设置为0(默认值),读取将无限期阻塞(等待),除非在端口上设置NDELAY选项open或fcntl。
VMIN与VTIME的组合方式如下:
(1)VMIN = 0 , VTIME =0
有read立即回传,否则传回 0 ,不读取任何字元
(2)VMIN = 0 , VTIME >0
read传回读到的字元,或在十分之一秒后传回VTIME
(3)VMIN > 0 , VTIME =0
read会等待,直到VMIN字元可读
(4)VMIN > 0 , VTIME > 0
每一格字元之间计时器即会被启动
read会在读到VMIN字元,传回值或VTIME的字元计时(1/10秒)超过时将值传回
2.4 与结构体struct termios相关的函数
函数命名解释:
- tc:terminal contorl
- cf:control flag
2.4.1 tcgetattr()与tcsetattr()
(1)tcgetattr()函数:get terminal attributes,获得终端的属性
原型:
#include <termios.h>
#include <unistd.h>
int tcgetattr(int fd, struct termios *termios_p);
作用:取得终端介质(fd)初始值,并把其值 赋给temios_p; 函数可以从后台进程中调用;但是,终端属性可能被后来的前台进程所改变。
(2)tcsetattr() 函数:set terminal attributes,修改终端参数
原型:
#include <termios.h>
#include <unistd.h>
int tcsetattr(int fd, int optional_actions, const struct termios *termios_p);
作用:设置与终端相关的参数 ,使用 termios_p 引用的 termios 结构。optional_actions (tcsetattr函数的第二个参数)指定了什么时候改变会起作用,可以使用的值如下:
- TCSANOW:改变立即发生
- TCSADRAIN:改变在所有写入 fd 的输出都被传输后生效。这个函数应当用于修改影响输出的参数时使用。(当前输出完成时将值改变)
- TCSAFLUSH :改变在所有写入 fd 引用的对象的输出都被传输后生效,所有已接受但未读入的输入都在改变发生前丢弃(同TCSADRAIN,但会舍弃当前所有值)。
2.4.2 tcflush()
原型:
int tcflush(int fd, int queue_selector);
作用:丢弃要写入 引用的对象,但是尚未传输的数据,或者收到但是尚未读取的数据,取决于 queue_selector 的值。 queue_selector的取值有:
- TCIFLUSH :刷新收到的数据但是不读
- TCOFLUSH :刷新写入的数据但是不传送
- TCIOFLUSH :同时刷新收到的数据但是不读,并且刷新写入的数据但是不传送
2.4.3 tcflow()
原型:
int tcflow(int fd, int action);
作用:挂起 fd 引用的对象上的数据传输或接收,取决于 action 的值。 action 取值有:
- TCOOFF :挂起输出
- TCOON :重新开始被挂起的输出
- TCIOFF :发送一个 STOP 字符,停止终端设备向系统传送数据
- TCION :发送一个 START 字符,使终端设备向系统传输数据
打开一个终端设备时的默认设置是输入和输出都没有挂起。
2.4.4 波特率函数
波特率函数被用来获取和设置 termios结构体中输入和输出波特率的值。新值不会马上生效,直到成功调用了 tcsetattr() 函数。
(1)cfgetospeed()函数
原型:
speed_t cfgetispeed(const struct termios *termios_p);
作用:返回 termios_p 指向的 termios 结构中存储的输出波特率。返回存储在终端结构中的输入波特率。
(2)cfsetispeed()函数:sets the input baud rate,设置输入波特率
原型:
int cfsetispeed(struct termios *termios_p, speed_t speed);
作用:设置 termios 结构中存储的输入波特率为 speed。如果输入波特率被设为0,实际输入波特率将等于输出波特率。
(3)cfsetospeed()函数:sets the output baud rate,设置输出波特率
原型:
int cfsetospeed(struct termios *termios_p, speed_t speed);
作用:设置 termios 结构中存储的输出波特率为 speed。
(4)cfsetspeed()函数:同时设置输入、输出波特率
原型:
int cfsetspeed(struct termios *termios_p, speed_t speed);
作用:cfsetspeed()是一个4.4BSD扩展。它接受与cfsetispeed()相同的参数,并设置输入和输出速度。
(5)波特率大小设置选择
如图:
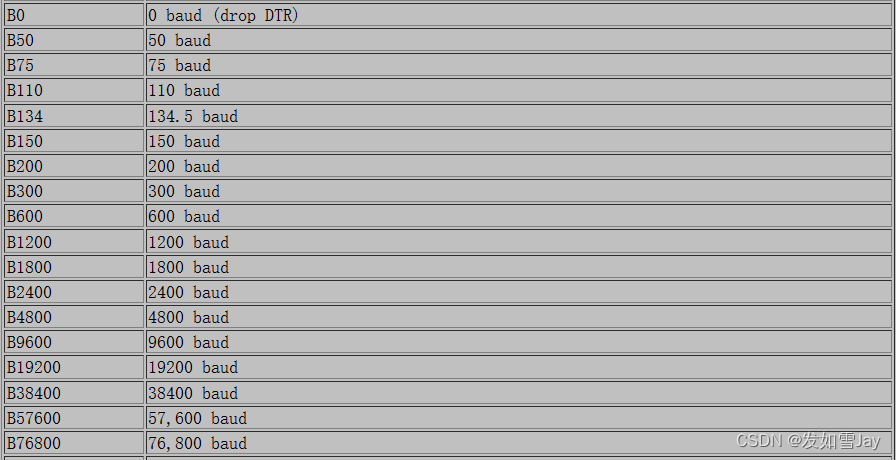
3. Linux串口应用编程实例
下面给出了串口配置的完整的函数。通常,为了函数的通用性,通常将常用的选项都在函数中列出,这样可以大大方便以后用户的调试使用。该设置函数如下所示:
3.1 串口配置的函数
// fd:设备文件描述符;nSpeed:需要设置的波特率;nBits:需要设置的数据位数;nEvent:奇偶校验位;nStop:停止位
int set_opt(int fd,int nSpeed, int nBits, char nEvent, int nStop){
struct termios newtio,oldtio;
/*保存测试现有串口参数设置,在这里如果串口号等出错,会有相关的出错信息*/
if ( tcgetattr( fd,&oldtio) != 0) {
perror("SetupSerial 1");
return -1;
}
//将 newtio 清零
bzero( &newtio, sizeof( newtio ) );
/*步骤一,设置字符大小*/
newtio.c_cflag |= CLOCAL | CREAD;
newtio.c_cflag &= ~CSIZE;
/*设置数据位*/
switch( nBits ){
case 7:
newtio.c_cflag |= CS7;
break;
case 8:
newtio.c_cflag |= CS8;
break;
}
/*设置奇偶校验位*/
switch( nEvent ){
case 'O': //奇数
newtio.c_cflag |= PARENB;
newtio.c_cflag |= PARODD;
newtio.c_iflag |= (INPCK | ISTRIP);
break;
case 'E': //偶数
newtio.c_iflag |= (INPCK | ISTRIP);
newtio.c_cflag |= PARENB;
newtio.c_cflag &= ~PARODD;
break;
case 'N': //无奇偶校验位
newtio.c_cflag &= ~PARENB;
break;
}
/*设置波特率*/
switch( nSpeed ){
case 2400:
cfsetispeed(&newtio, B2400);
cfsetospeed(&newtio, B2400);
break;
case 4800:
cfsetispeed(&newtio, B4800);
cfsetospeed(&newtio, B4800);
break;
case 9600:
cfsetispeed(&newtio, B9600);
cfsetospeed(&newtio, B9600);
break;
case 115200:
cfsetispeed(&newtio, B115200);
cfsetospeed(&newtio, B115200);
break;
case 460800:
cfsetispeed(&newtio, B460800);
cfsetospeed(&newtio, B460800);
break;
default:
cfsetispeed(&newtio, B9600);
cfsetospeed(&newtio, B9600);
break;
}
/*设置停止位*/
if( nStop == 1 )
newtio.c_cflag &= ~CSTOPB;
else if ( nStop == 2 )
newtio.c_cflag |= CSTOPB;
/*设置等待时间和最小接收字符*/
newtio.c_cc[VTIME] = 0;
newtio.c_cc[VMIN] = 0;
/*处理未接收字符*/
tcflush(fd,TCIFLUSH);
/*激活新配置*/
if((tcsetattr(fd,TCSANOW,&newtio))!=0){
perror("com set error");
return -1;
}
printf("set done!\n");
return 0;
}
3.2 打开串口的函数
下面给出了一个完整的打开串口的函数,同样写考虑到了各种不同的情况。程序如下所示:
/*打开串口函数*/
int open_port(int fd,int comport){
char *dev[]={"/dev/ttyS0","/dev/ttyS1","/dev/ttyS2"};
//串口 1
if (comport==1){
fd = open( "/dev/ttyS0", O_RDWR|O_NOCTTY|O_NDELAY);
if (-1 == fd){
perror("Can't Open Serial Port");
return(-1);
}
}
else if(comport==2){//串口 2
fd = open( "/dev/ttyS1", O_RDWR|O_NOCTTY|O_NDELAY);
if (-1 == fd){
perror("Can't Open Serial Port");
return(-1);
}
}
else if (comport==3){//串口 3
fd = open( "/dev/ttyS2", O_RDWR|O_NOCTTY|O_NDELAY);
if (-1 == fd){
perror("Can't Open Serial Port");
return(-1);
}
}
/*恢复串口为阻塞状态*/
if(fcntl(fd, F_SETFL, 0)<0)
printf("fcntl failed!\n");
else
printf("fcntl=%d\n",fcntl(fd, F_SETFL,0));
/*测试是否为终端设备*/
if(isatty(STDIN_FILENO)==0)
printf("standard input is not a terminal device\n");
else
printf("isatty success!\n");
printf("fd-open=%d\n",fd);
return fd;
}
3.3 从串口中读取数据
//
int read_datas(int fd, char *rcv_buf,int rcv_wait){
int retval;
fd_set rfds;
struct timeval tv;
int ret,pos;
tv.tv_sec = rcv_wait; // wait 2.5s
tv.tv_usec = 0;
pos = 0; // point to rceeive buf
while (1){
FD_ZERO(&rfds);
FD_SET(fd, &rfds);
retval = select(fd+1 , &rfds, NULL, NULL, &tv);
if (retval == -1){
perror("select()");
break;
}
else if (retval){// pan duan shi fou hai you shu ju
ret = read(fd, rcv_buf+pos, 2048);
pos += ret;
if (rcv_buf[pos-2] == '\r' && rcv_buf[pos-1] == '\n'){
FD_ZERO(&rfds);
FD_SET(fd, &rfds);
retval = select(fd+1 , &rfds, NULL, NULL, &tv);
if (!retval) break;// no datas, break
}
}
else{
printf("No data\n");
break;
}
}
return 1;
}
3.4 向串口传数据
int send_data(int fd, char *send_buf){
ssize_t ret;
ret = write(fd,send_buf,strlen(send_buf));
if (ret == -1){
printf ("write device %s error\n", DEVICE_TTYS);
return -1;
}
return 1;
}
参考
[1] https://digilander.libero.it/robang/rubrica/serial.htm
[2] https://blog.csdn.net/yemingzhu163/article/details/5897156
[3] https://www.cnblogs.com/feisky/archive/2010/05/21/1740893.html