STM32使用PWM(脉冲宽度调制)
- 一、PWM概述
- 二、STM32的PWM分析
- 三、PWM产生的流程
- 示例代码
一、PWM概述
脉冲宽度调制(PWM),是英文“Pulse Width Modulation”的缩写,简称脉宽调制,是利用微处理器的数字输出(1或0)来对模拟电路进行控制的一种非常有效的技术。
PWM应用场景如下:
使用PWM信号控制温度。
使用PWM信号控制比例阀的开度。
使用PWM信号控制电机的转速(直流电机 步进电机 伺服电机)
使用PWM信号控制舵机的转向。
占空比:占空比是指在一个脉冲循环内,通电时间(可能是高电平,可能是低电平)相对于总时间所占的比例。
二、STM32的PWM分析
PWM产生框架图如下:
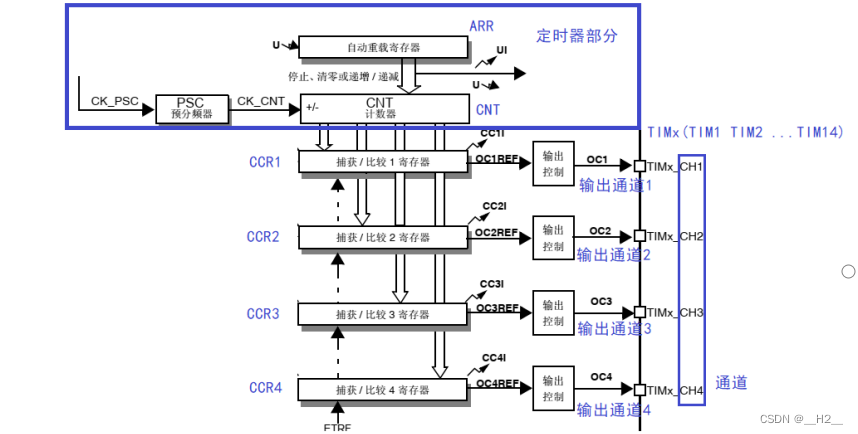
定时器部分是提供PWM周期,如在定时器1MHZ,计1000个数,那么PWM周期:1ms(周期不能过长)
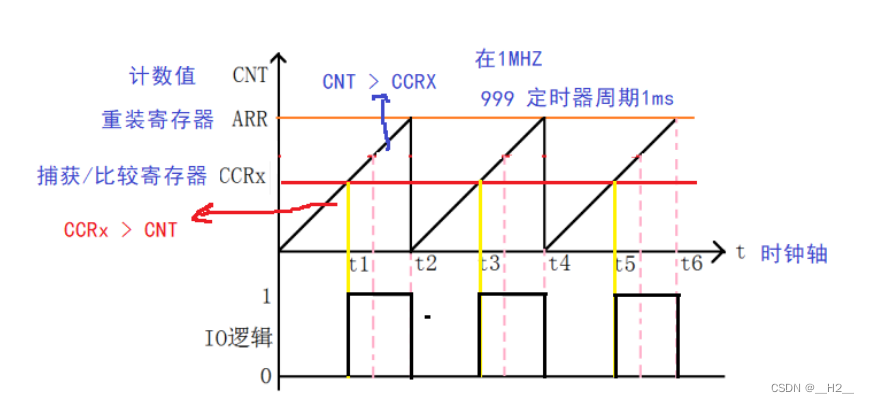
输出极性:程序设置默认输出的电平。当通道有效,则输出默认的设置电平;通道无效,输出与设置的极性相反的电平(设置999为速度最快为高极性,反之为低极性)
PWM 模式 1–– 在递增计数模式下,只要 TIMx_CNT<TIMx_CCR1,通道 1 便为有效状态,否则为无效状态。
在递减计数模式下,只要 TIMx_CNT>TIMx_CCR1,通道 1 便为无效状态( OC1REF=“0”),否则为有效状态( OC1REF=“1”)。
PWM 模式 2–– 在递增计数模式下,只要 TIMx_CNT<TIMx_CCR1,通道 1 便为无效状态,否则为有效状态。
在递减计数模式下,只要 TIMx_CNT>TIMx_CCR1,通道 1 便为有效状态,否则为无效状态。
三、PWM产生的流程
(1)使能定时器4和相关IO口时钟。
PB6----TIM4_CH1
(2)使能定时器4和相关IO口时钟。
使能定时器4时钟:RCC_APB2PeriphClockCmd();
使能GPIOB时钟:RCC_AHB2PeriphClockCmd ();
(3)初始化IO口为复用功能输出。
函数:GPIO_Init();
GPIO_InitStructure.GPIO_Mode =GPIO_Mode_AF_PP; //复用功能
(4)初始化定时器:ARR,PSC等:
TIM_TimeBaseInit();
(5)初始化输出比较参数:
TIM_OC1Init();
(6)使能预装载寄存器:
TIM_OC1PreloadConfig(TIM4, TIM_OCPreload_Enable);
(7)使能自动重装载的预装载寄存器允许位
TIM_Cmd(TIM4, ENABLE);
(8)不断改变比较值CCRx,达到不同的占空比效果:
TIM_SetCompare1();
示例代码
将这段代码放到你的工程文件中,将GPIO引脚号改为你的LED灯的引脚号,你将看到led灯以呼吸灯的形式闪烁。
void Pwm_init(void)
{
GPIO_InitTypeDef GPIO_InitStruct;
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStruct;
TIM_OCInitTypeDef TIM_OCInitStruct;
//使能定时器4和相关IO口时钟。
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB|RCC_APB2Periph_AFIO,ENABLE);
//初始化IO口为复用功能输出。
GPIO_InitStruct.GPIO_Mode = GPIO_Mode_AF_PP;//复用模式
GPIO_InitStruct.GPIO_Pin = GPIO_Pin_1;//引脚1
GPIO_InitStruct.GPIO_Speed = GPIO_Speed_50MHz;//速率
GPIO_Init(GPIOB, &GPIO_InitStruct);
//初始化定时器:ARR,PSC等:
TIM_TimeBaseInitStruct.TIM_Period=2000-1;//周期数 计2000个数 在1000000HZ下 20ms
TIM_TimeBaseInitStruct.TIM_Prescaler=720-1;//预分频 72HZ/720= 100000HZ
TIM_TimeBaseInitStruct.TIM_ClockDivision=0;//分频因子 一个脉冲记一个数
TIM_TimeBaseInitStruct.TIM_CounterMode=TIM_CounterMode_Up;//向上计数模式
TIM_TimeBaseInit(TIM3,&TIM_TimeBaseInitStruct);
//初始化输出比较参数:
TIM_OCInitStruct.TIM_OCMode = TIM_OCMode_PWM1;//PWM模式1
TIM_OCInitStruct.TIM_Pulse = 0;//脉冲值
TIM_OCInitStruct.TIM_OCPolarity = TIM_OCPolarity_High;//高极性
TIM_OCInitStruct.TIM_OutputState = TIM_OutputState_Enable;//使能
TIM_OC4Init(TIM3,&TIM_OCInitStruct);
//使能预装载寄存器:
TIM_OC4PreloadConfig(TIM3, TIM_OCPreload_Enable);
//使能自动重装载的预装载寄存器允许位
TIM_Cmd(TIM3, ENABLE);
}
#include "stm32f10x.h"
#include "delay.h"
//主函数
int main(void)
{
int i;
//中断优先级分组
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);
LED_Init();//初始化LED
Pwm_Init();//设置定时器3输出PWM
while(1)//呼吸灯
{
//从暗到亮
for(i=1; i<499; i++)//定时器4重装载值为499
{
TIM_SetCompare1(TIM3,i);//根据i的值设置比较值,调整占空比
delay_ms(20);//根据实际情况进行调整,方便观察效果
}
//从亮到暗
for(i=499; i>0; i--)
{
TIM_SetCompare1(TIM3,i);
delay_ms(20);
}
}
return 0;
}