虹科致力于为用户提供最优的机器视觉解决方案。本文将用虹科的AI深度相机与英特尔的深度相机来做图像的对比测试,那么它们有哪些性能差异呢?
虹科深度相机
HK OAK-D Pro有两个核心功能:红外激光点阵投影仪和红外照明LED。
红外激光点阵投影仪会主动发出激光小点来辅助完成视差匹配,对于纹理特征比较少的表面(例如空白墙或一张纸)特别有用。为了获取这类型表面的高质量图像,我们使用了一种主动立体视觉的技术,应用了该技术的设备与没有红外激光点投影的设备(例如HK OAK-D-Lite)采集图像的方式相同,实测图像如下。

同时,红外照明LED支持夜视功能:部署在设备上的神经网络模型和计算机视觉处理可以在低光或黑暗环境下正常工作。使用红外照明LED辅助时,对象检测、语义分割等任务在低光照环境下都更容易实现。
如下,左图是没有打开设备夜视功能时采集的图像,右图是打开夜视功能时采集的图像。

HK OAK-D Pro深度相机 VS Intel RealSense D435I深度相机
现在,我们深入研究并比较HK OAK-D Pro和英特尔RealSense D435i之间的一些性能差异。我们将看看两种情况,第一种是禁用激光点阵投影仪,第二种是启用激光点阵投影仪,以展示HK OAK-D Pro的卓越性能。
首先,这是我们的目标图像(由正在进行独立测试的客户主动提供给我们的)。

我们看下纹理特征比较少的两个主要表面:桌子和墙壁。它们的颜色和纹理相同,在深度检测应用是一个棘手的挑战。除此之外,我们看到还有电线和胶带分配器,这两个物体的纹理信息实际也比较少。
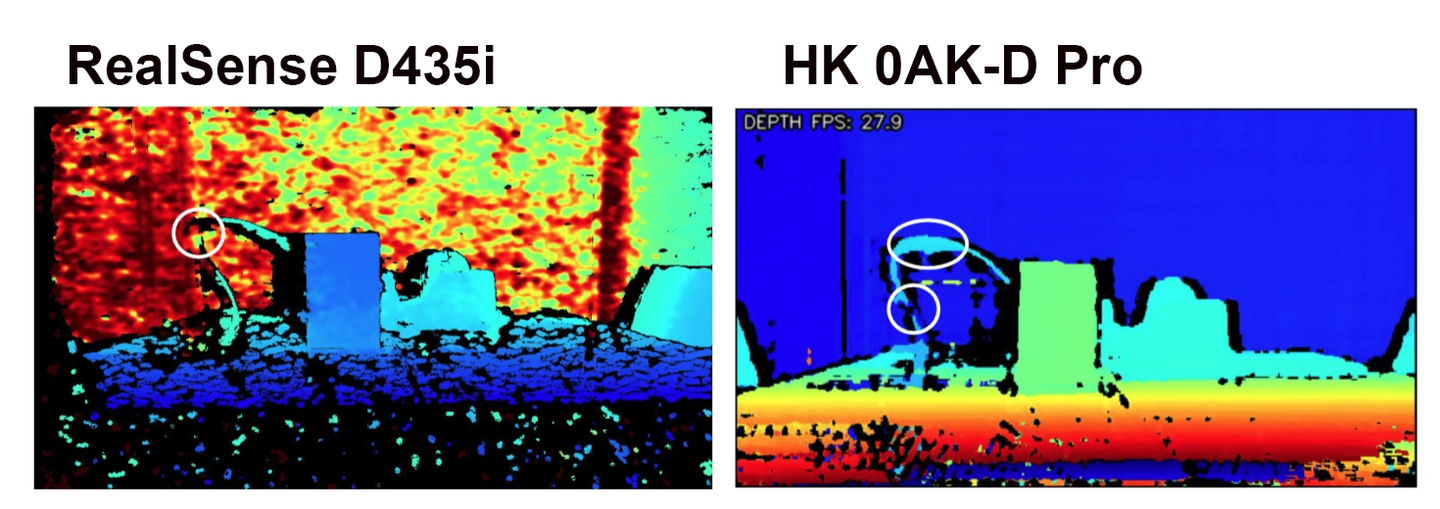
如下,左右图分别为RealSense D435i和HK OAK-D Pro两款深度相机采集回来的图像,此时HK OAK-D Pro深度相机是关闭了激光点阵投影仪功能。

这两张图像的质量差异显而易见。左图,盒子很突出,但是噪点很多。另外两个主要物体,电线和胶带分配器,图像上基本都无法看到其轮廓。右图中,盒子轮廓很清晰,并且纹理特征比较少的表面图像也比较清楚,电线的轮廓也更加突出。虽然胶带分配器的轮廓略有扭曲,但它的完整形状被捕获。
上面是关闭HK OAK-D Pro红外激光点阵投影仪的图像,这意味着我们有很大的改进空间。让我们来看看激活红外激光点阵投影仪后情况会如何变化。
正如预期的那样,这两种设备采集的图像都得到了很大的改进。然而,在RealSense D435i的左侧,虽然我们更清楚地看到了场景,但纹理特征少的表面,深度信息仍然不一致,物体边缘的清晰度也不足。在右图,HK OAK-D Pro捕捉到更全面的场景,红外激光点阵投影仪帮助它准确地测量到纹理特征少的表面深度,我们还可以看到电线和胶带分配器的一致性更高。
如果您要检测纹理特征信息非常少的物体表面,基于板载深度相机对来实现深度检测,可以看到HK OAK-D Pro和RealSense D435i之间存在一些相似之处,但是比较之下,HK OAK-D Pro采集的图像质量更优。HK OAK-D Pro并不止于此,相机本身还可以支持部署AI神经网络模型、Opencv图像处理等,可以为您提供全面的支持。
虹科AI深度相机
HK OAK-D-Pro

HK OAK-D-Pro提供4TOPS算力和运行任何AI网络模型的能力。HK OAK-D Pro具有红外激光点投影仪(主动立体视觉)和红外照明LED(夜视模式),并且有两种版本:固定焦点和自动对焦。
主要特点:
-
4 TOPS算力(1.4 TOPS用于人工智能)
-
运行任何AI模型,甚至是自定义架构/构建的模型
-
编码: H.264、H.265、MJPEG-4K/30FPS、1080P/60FPS
-
计算机视觉:扭曲/去毛刺、调整大小、裁剪、边缘检测、特征跟踪
-
带滤波的120 FPS立体深度感知
-
目标跟踪:2D和3D跟踪
-
用于电源和通信的USB-C连接器,支持USB2和USB3协议(5Gbps/10Gbps)
-
尺寸: 97x29.5x22.9mm。重量:91g。






![[ARM+Linux] 基于全志h616外设开发笔记](https://img-blog.csdnimg.cn/4536d97120b142dfa06e22eb878a693c.png)