一、题目
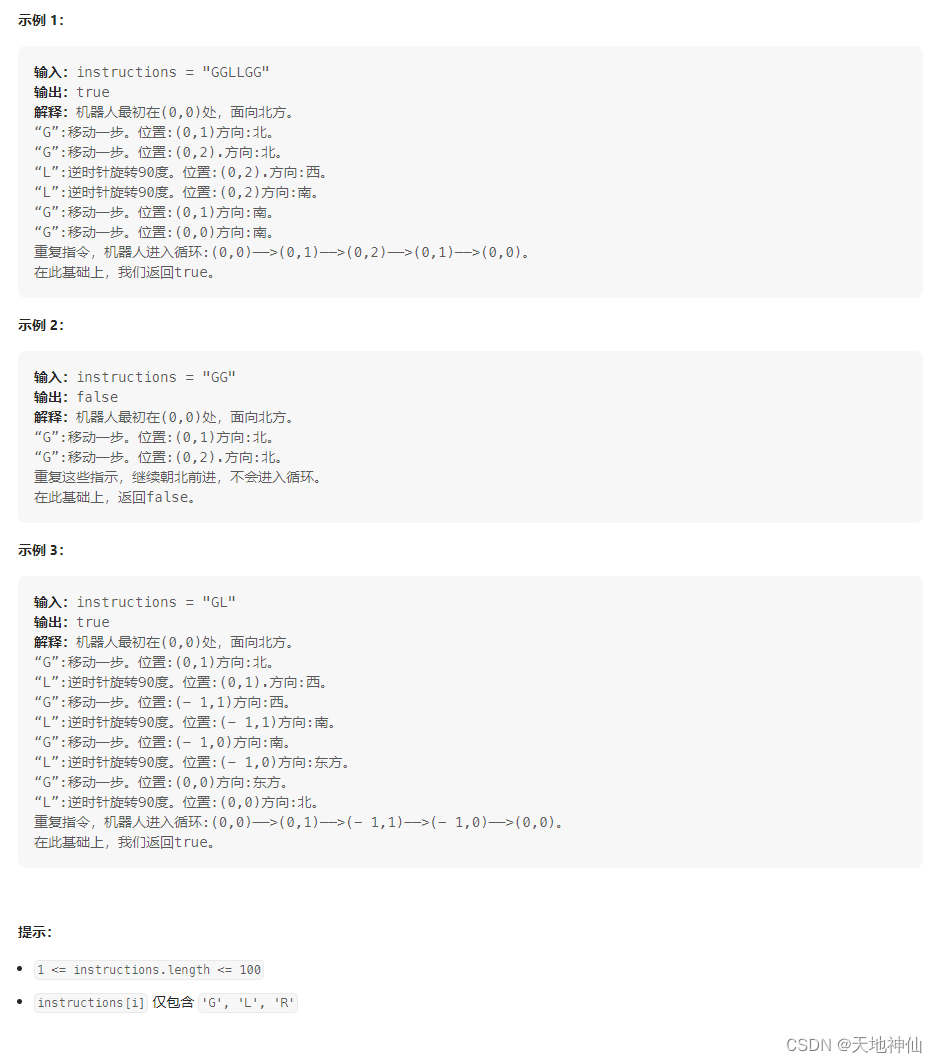
在无限的平面上,机器人最初位于 (0, 0) 处,面朝北方。注意:
北方向是y轴的正方向。
南方向是y轴的负方向。
东方向是x轴的正方向。
西方向是x轴的负方向。
机器人可以接受下列三条指令之一:
“G”:直走 1 个单位
“L”:左转 90 度
“R”:右转 90 度
机器人按顺序执行指令 instructions,并一直重复它们。
只有在平面中存在环使得机器人永远无法离开时,返回 true。否则,返回 false。
来源:力扣(LeetCode)
链接:https://leetcode.cn/problems/robot-bounded-in-circle/description/
二、C++解法
我的思路及代码
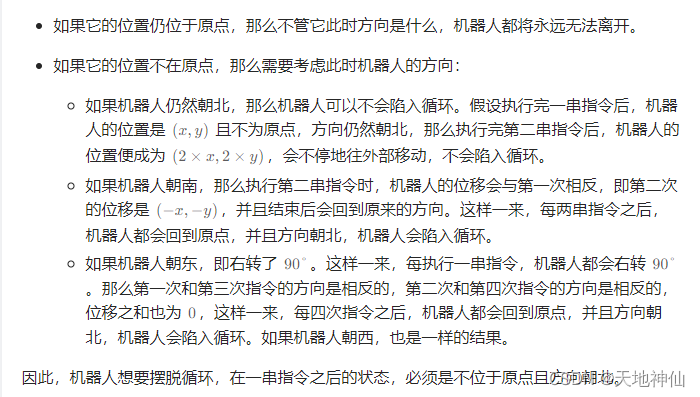
考虑三种情况:
①执行完成一次后方向不变且有位移,此时可以走出去
②执行完成一次后方向反向,那么再执行一次后将会回到原点,走不出去
③执行完成一次后方向逆/顺时针改变90度,这样再执行三次也会回到原点,走不出去
综上所述,可以直接模拟4次,若还在原点则说明走不出去返回 true ,其他情况我们就返回 false ,说明可以走出去
class Solution {
public:
bool isRobotBounded(string instructions) {
int curFace=0;
int row = 0,col = 0;
for(int i=0;i<4;i++){
for(char ch:instructions){
switch(ch){
case 'G':
if(curFace == 0)
row++;
if(curFace == 1)
col++;
if(curFace == 2)
row--;
if(curFace == 3)
col--;
break;
case 'L':
if(curFace == 0)
curFace = 3;
else curFace--;
break;
case 'R':
if(curFace ==3)
curFace = 0;
else curFace++;
break;
}
}
}
if(row == 0&&col == 0)
return true;
return false;
}
};
- 时间复杂度:O(n),其中 n 是 instructions 的长度,需要遍历 instructions 四次
- 空间复杂度:O(1),只用到常数空间
官方参考代码
class Solution {
public:
bool isRobotBounded(string instructions) {
vector<vector<int>> direc {{0, 1}, {1, 0}, {0, -1}, {-1, 0}};
int direcIndex = 0;
int x = 0, y = 0;
for (char instruction : instructions) {
if (instruction == 'G') {
x += direc[direcIndex][0];
y += direc[direcIndex][1];
} else if (instruction == 'L') {
direcIndex += 3;
direcIndex %= 4;
} else {
direcIndex++;
direcIndex %= 4;
}
}
return direcIndex != 0 || (x == 0 && y == 0);
}
};
- 时间复杂度:O(n),其中 n 是 instructions 的长度,需要遍历 instructions 一次
- 空间复杂度:O(1),只用到常数空间