文章目录
- 0.引言
- 1.创建工作空间
- 2.获取rplidar_ros包并编译
- 3.检查雷达端口
- 4.启动launch显示雷达扫描结果
0.引言
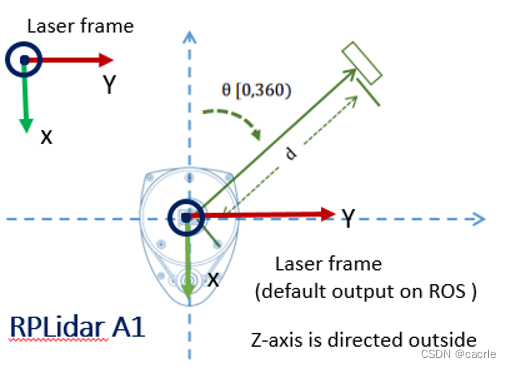
笔者研究课题涉及多传感器融合,除了前期对ROS工具的学习,还需要用雷达获取数据,进行点云处理。虽然激光雷达已经应用很广泛,但在一些专门的测量领域还需要改进设备才能应用,结合消费级的二维激光雷达和其他传感器建立对象的三维模型,并进行变形分析。本文介绍雷达的使用,RPLIDAR是低成本的二维雷达解决方案,由SlamTec公司的RoboPeak团队开发,本次学习采用RPLidar A1型号激光雷达,它能扫描360°,6米半径的范围它适合用于构建地图,SLAM,和建立3D模型,其固定方案如下如:
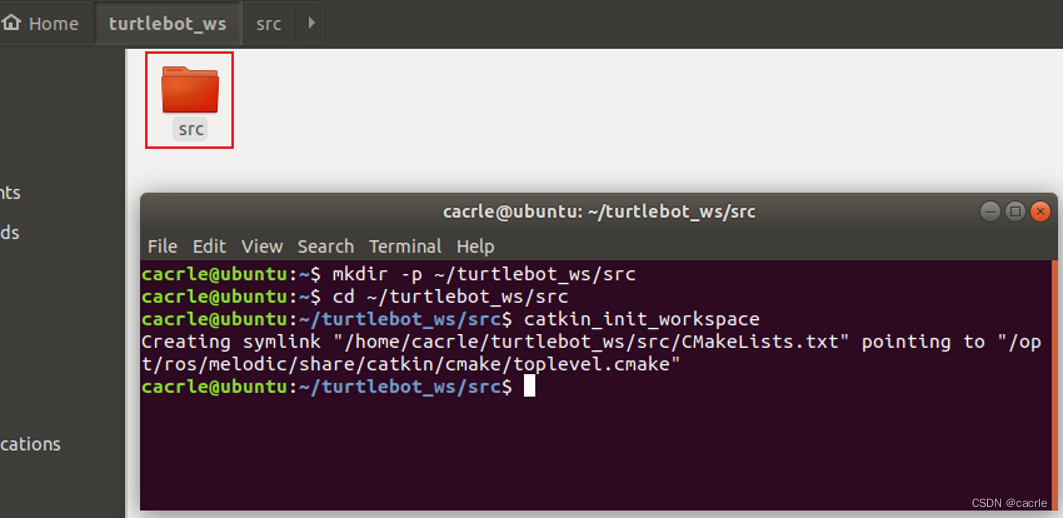
1.创建工作空间
mkdir -p ~/turtlebot_ws/src
cd ~/turtlebot_ws/src
catkin_init_workspace
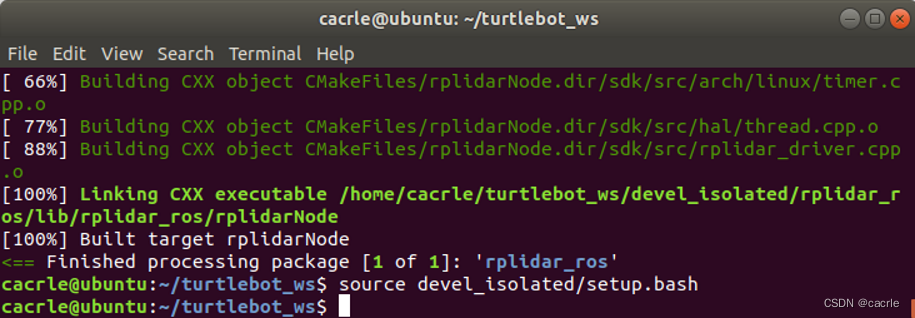
2.获取rplidar_ros包并编译
cd ~/turtlebot_ws/src
//下载rplidar_ros包
git clone [https://github.com/ncnynl/rplidar_ros.git](https://github.com/ncnynl/rplidar_ros.git)
cd ~/turtlebot_ws
catkin_make
或
catkin_make_isolated
source devel/setup.bash
或
source devel_isolated/setup.bash
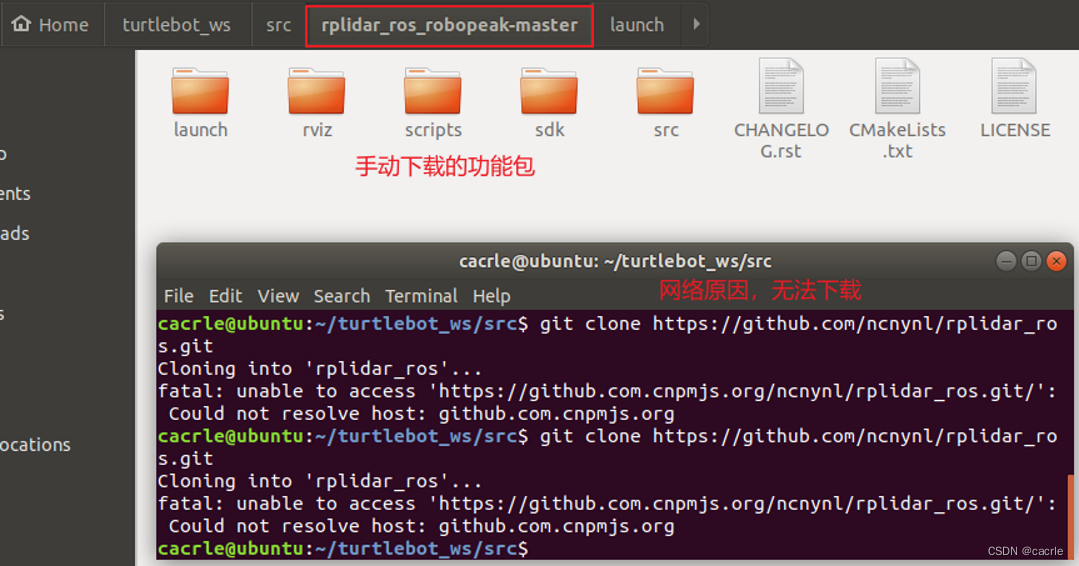
注:有时因网络原因,可能下载不了ros包,可以换手机wifi尝试,若wifi也无法下载,可以根据地址:https://github.com/ncnynl/rplidar_ros.git,手动下载,并将功能包放入src目录下。本文使用手动下载。
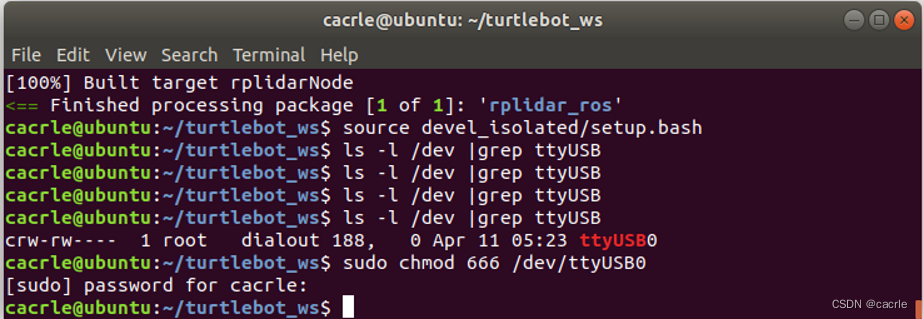
3.检查雷达端口
ls -l /dev |grep ttyUSB
sudo chmod 666 /dev/ttyUSB0
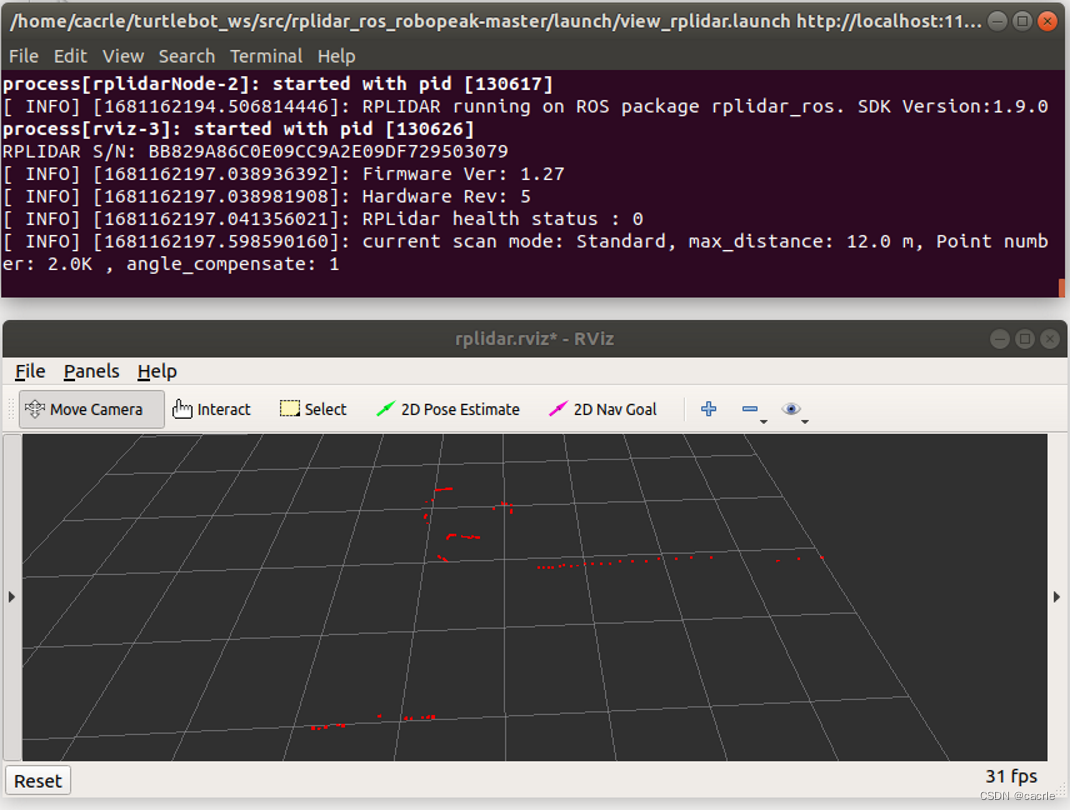
4.启动launch显示雷达扫描结果
cd ~/turtlebot_ws
source devel/setup.bash
或
source devel_isolated/setup.bash
roslaunch rplidar_ros view_rplidar.launch
参考资料:
[1] Eric_奋斗. [ROS学习笔记]ROS中使用激光雷达(RPLIDAR); 2018-01-23 [accessed 2023-04-11].
[2] Irving.Gao. ROS——树莓派4B使用思岚A1激光雷达和乐视深度相机; 2021-02-24 [accessed 2023-04-11].
[3] Eric_奋斗. [ROS学习笔记]ROS中使用激光雷达(RPLIDAR); 2018-01-23 [accessed 2023-04-11].
[4] nomil9. 树莓派&ROS:驱动EAI的激光雷达YDLIDAR-X4; 2018-12-03 [accessed 2023-04-11].
[5] Eric_奋斗. ROS学习笔记——先锋机器人P3-DX 的连接与控制; 2018-01-22 [accessed 2023-04-11].
[6] 星辰和大海都需要门票. rplidar的安装与使用; 2020-08-04 [accessed 2023-04-11].
[7] zkk9527. Rplidar 报错提示:Error, operation time out. RESULT_OPERATION_TIMEOUT!; 2020-10-20 [accessed 2023-04-11].
[8] 五月-Amber. 解决:minicom: can not open /dev/USB0:没有那个文件或目录; 2018-09-24 [accessed 2023-04-11].
[9] WisdomXLH. RPlidar(一)——雷达试用; 2018-06-02 [accessed 2023-04-11].
[10] 银时大魔王. 激光雷达初体验 - Ubuntu 18.04 + 思岚科技 RPLIDAR A1M8 + hector_slam 建图; 2020-09-11 [accessed 2023-04-11].
[11] 俊俊岑. 思岚rplidar A1激光点云数据读取; 2019-10-16 [accessed 2023-04-11].
[12] dori_z. ros中rviz查看激光雷达数据 hokuyo; 2019-08-22 [accessed 2023-04-11].
[13] TensorME. RVIZ中的fixed frame选项以及“For frame [XX]: Fixed Frame [map] does not exist”; 2019-01-20 [accessed 2023-04-11].