Z平面
稳定性分析
稳态误差分析
动态过程分析
频率特性
文章目录
- Z平面与S平面的映射关系
- 稳定性分析
- 离散Routh判据
- Jury判据
- 离散Nyquist判据
- 稳态误差
- 静态误差系数
- 动态过程
- 频率特性
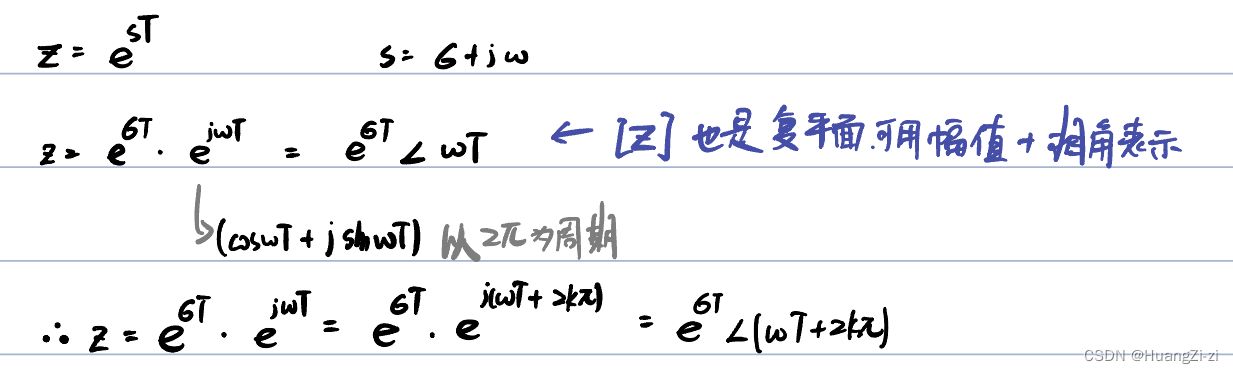
Z平面与S平面的映射关系
-
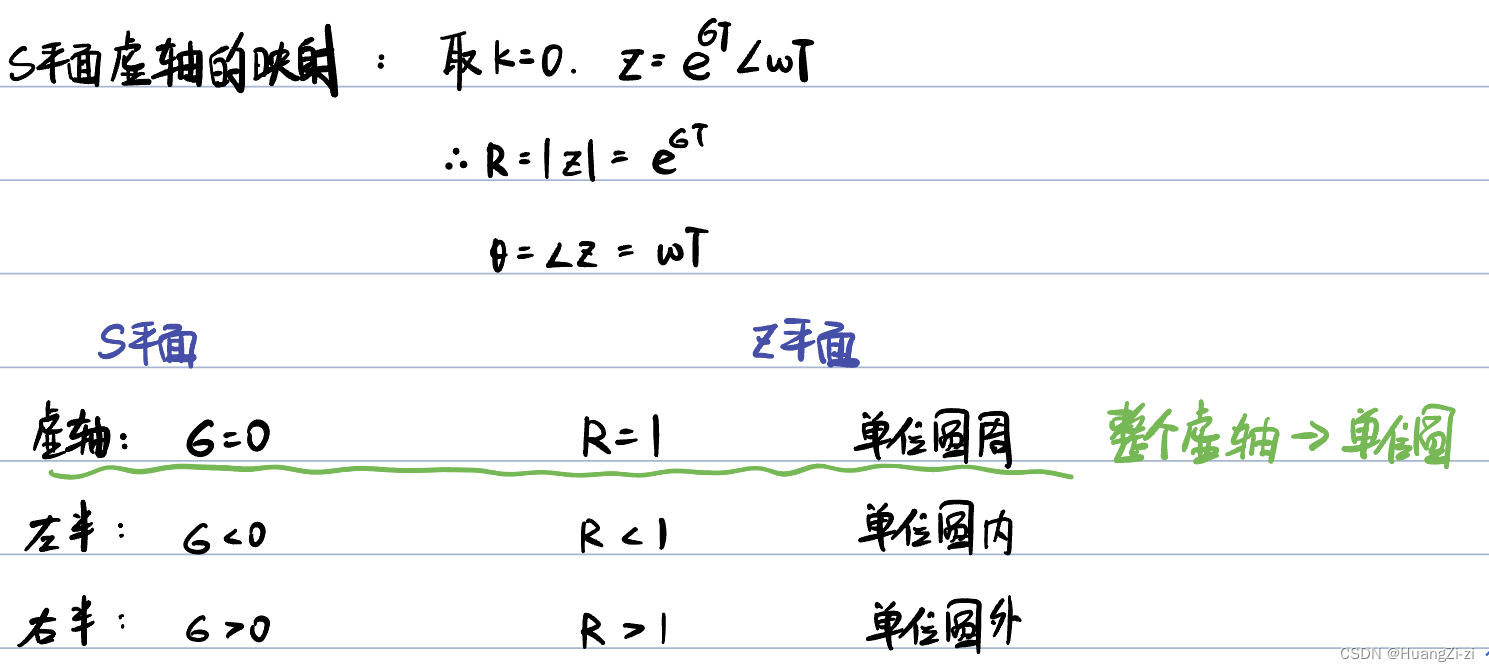
S平面虚轴的映射
-
ω \omega ω与 θ \theta θ的映射
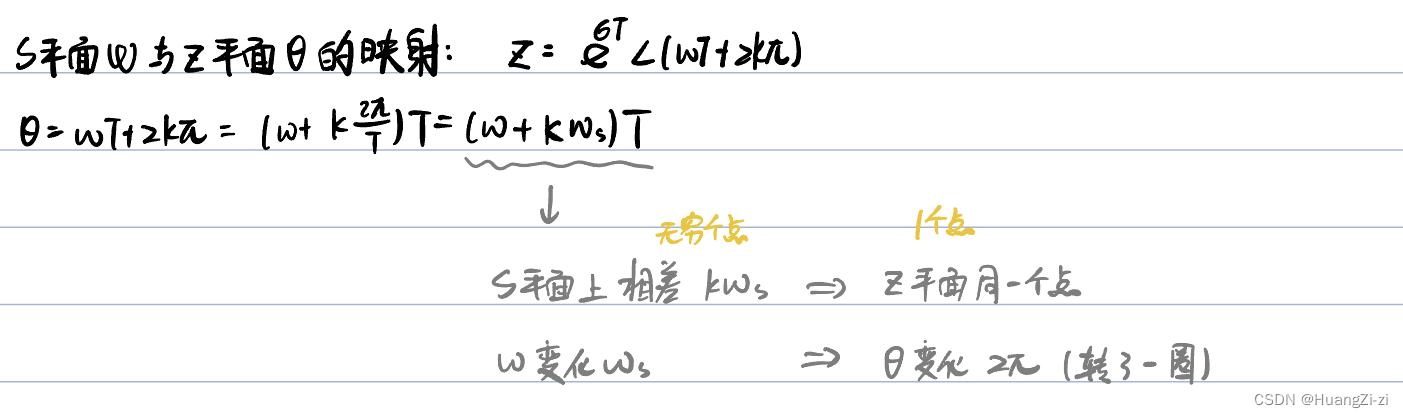
可以看出从S平面到Z平面并不是一一映射 -
主带与旁带
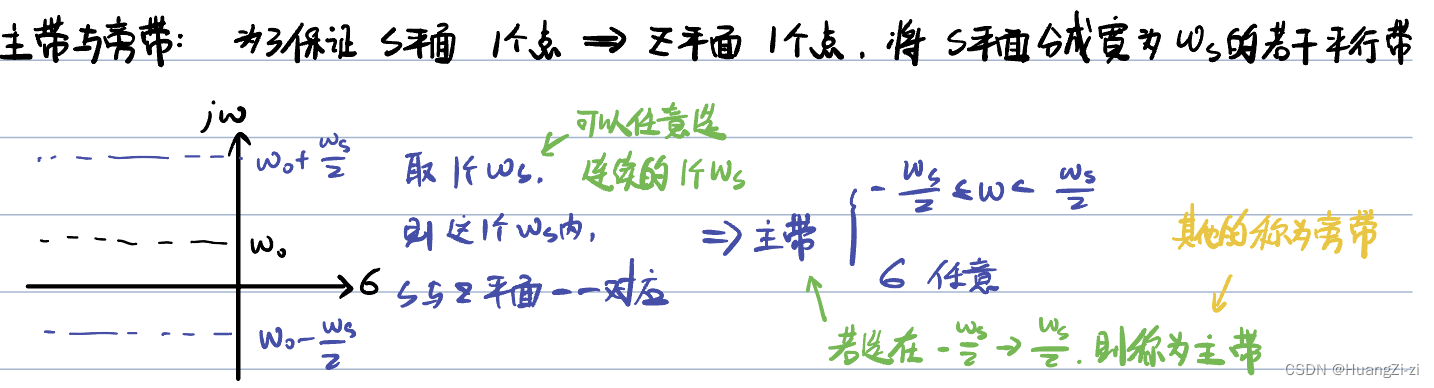
S平面上宽度 ω s \omega_s ωs的一条可以映射到整个Z平面,具体的情况如下: -
主带的映射
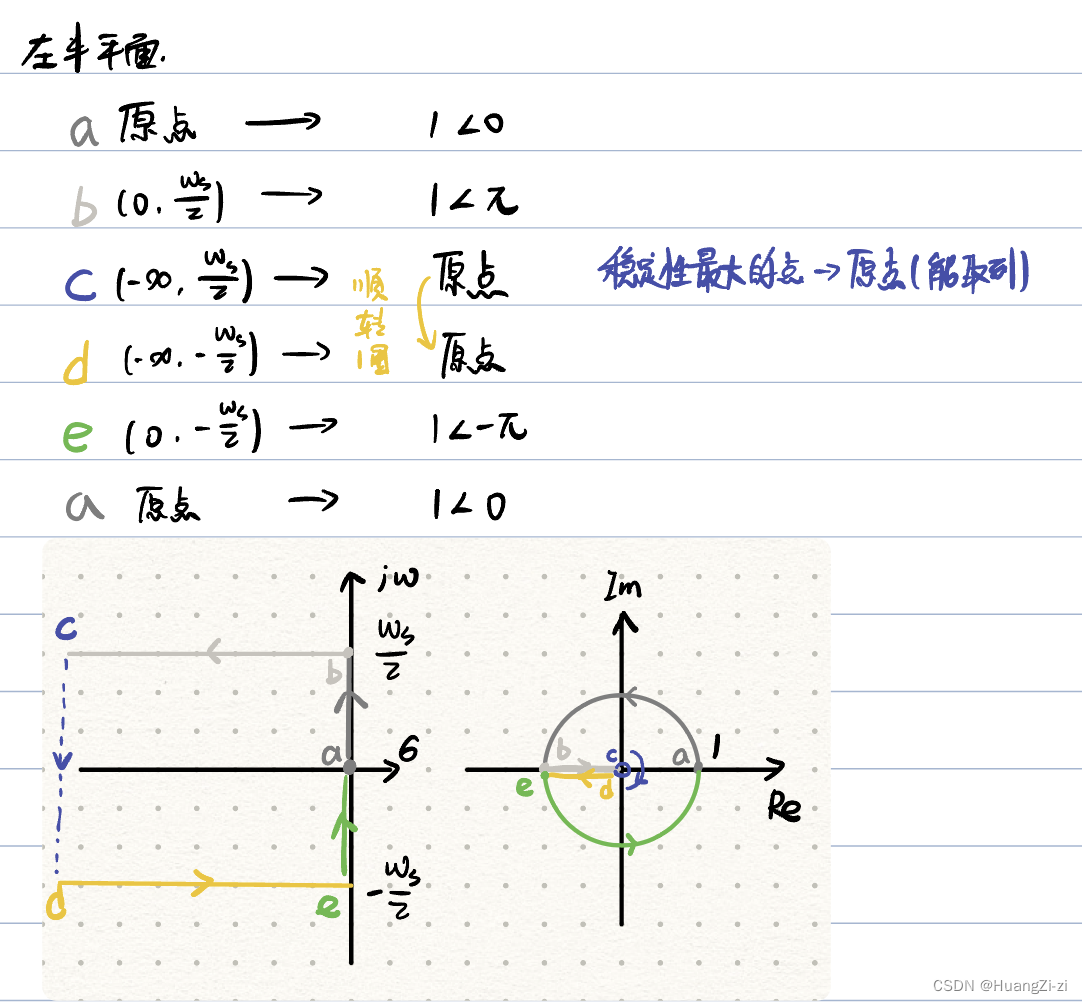
S平面主带左半平面可以映射到Z平面单位圆内。
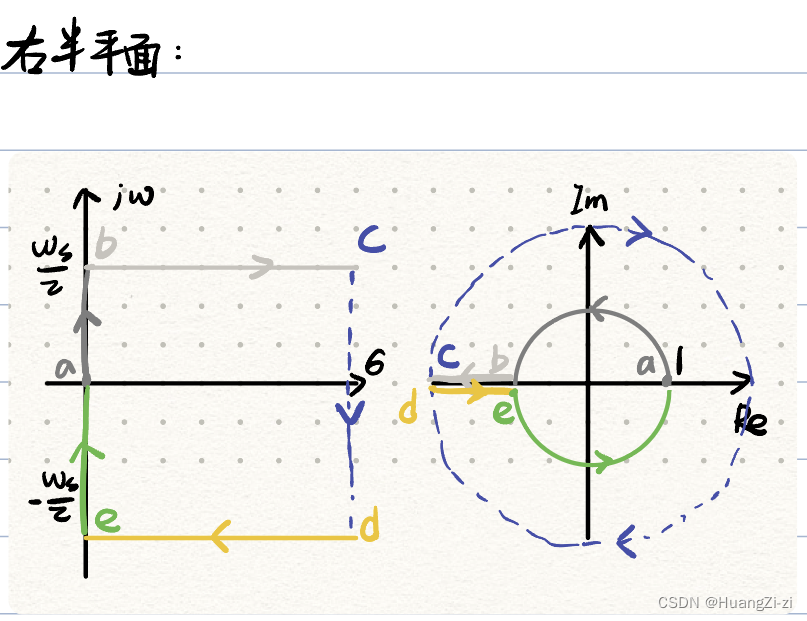
右半平面可以映射到Z平面单位圆外。 -
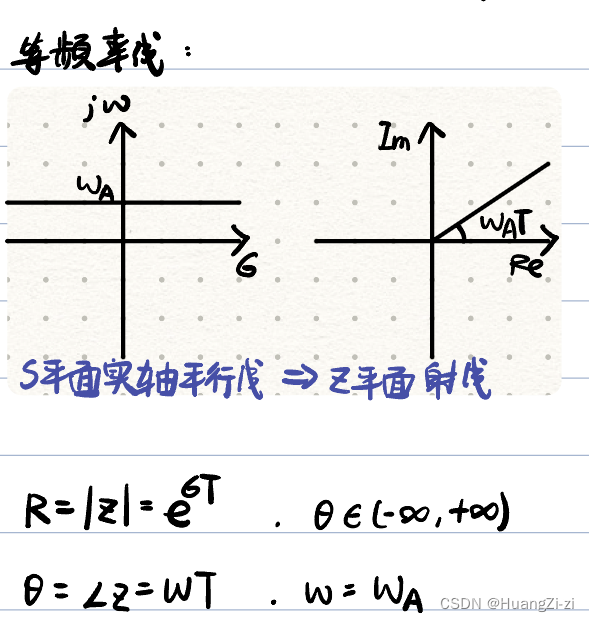
等频率线的映射
等频率即 ω \omega ω为常数,在S平面与实轴平行
-
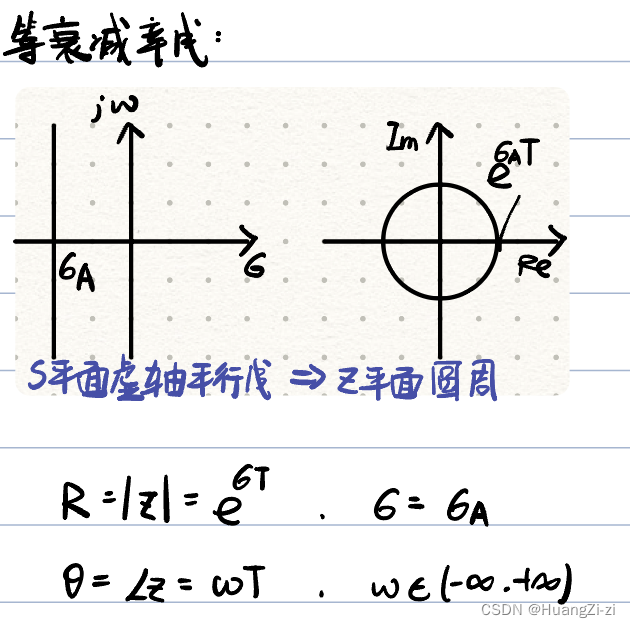
等衰减率线的映射
等衰减率即是 ξ ω n \xi \omega_n ξωn乘积为定值,对应平行于虚轴的直线
-
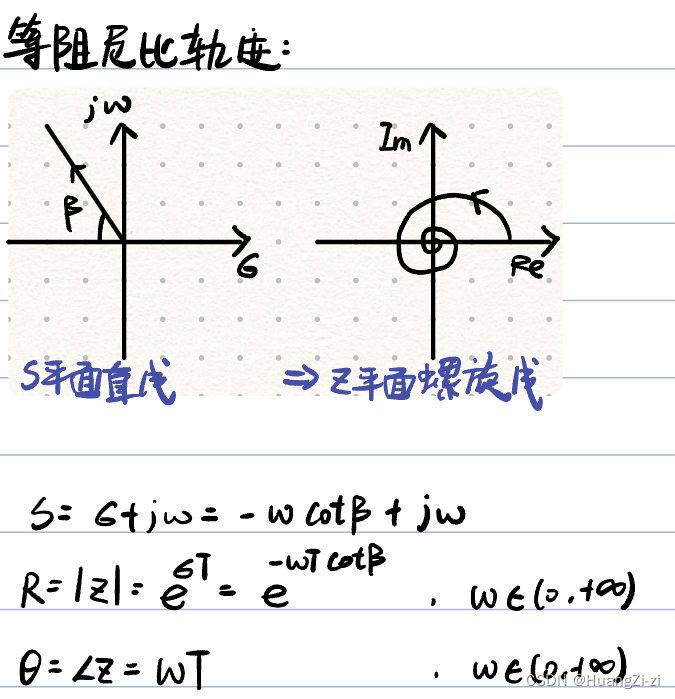
等阻尼比轨迹
cos β = ξ \cos \beta=\xi cosβ=ξ,等阻尼比即是S平面过原点的射线
稳定性分析
连续系统稳定:闭环特征根都在S平面的左半平面
根据映射关系:
离散系统稳定:闭环特征根都在Z平面单位圆内
利用特征根判别系统稳定性:
离散Routh判据
Routh判据是用来判断极点是否位于复平面左半平面的。因此需要引入一个新的变换,将Z平面的单位圆内,映射到某个平面的左半平面:
W变换:
z
=
1
+
w
1
−
w
\displaystyle z=\frac{1+w}{1-w}
z=1−w1+w
运用W变换以后,就可以像之前连续系统一样运用Routh判据了。
两种特殊情况的处理方法:
-
某行第一列为0:
用足够小的正数 ε \varepsilon ε替代0参与运算
用因子 ( w + a ) (w+a) (w+a)乘以原特征方程,其中 a a a为任意正数 -
某行全为0:
用全0行的上一行构造辅助方程,求导后用其系数替代全0行
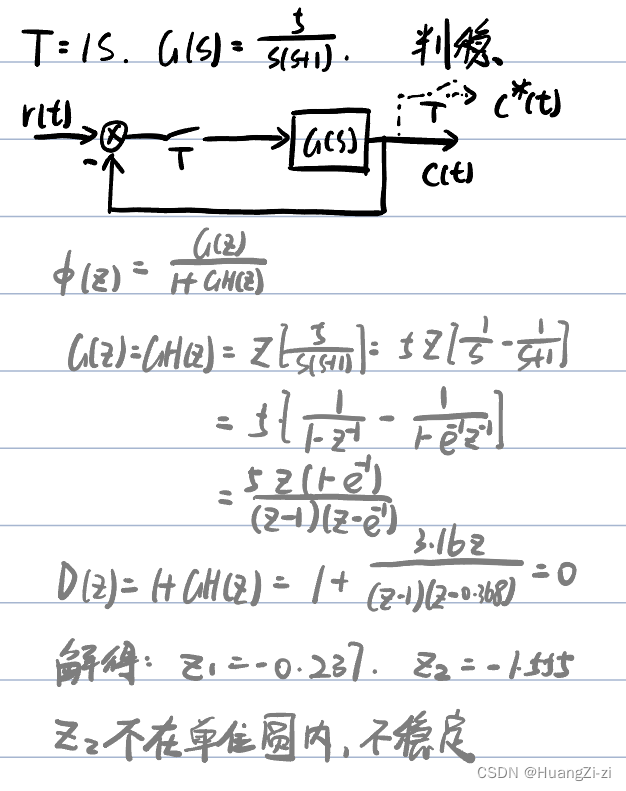
看一个综合性的例题:
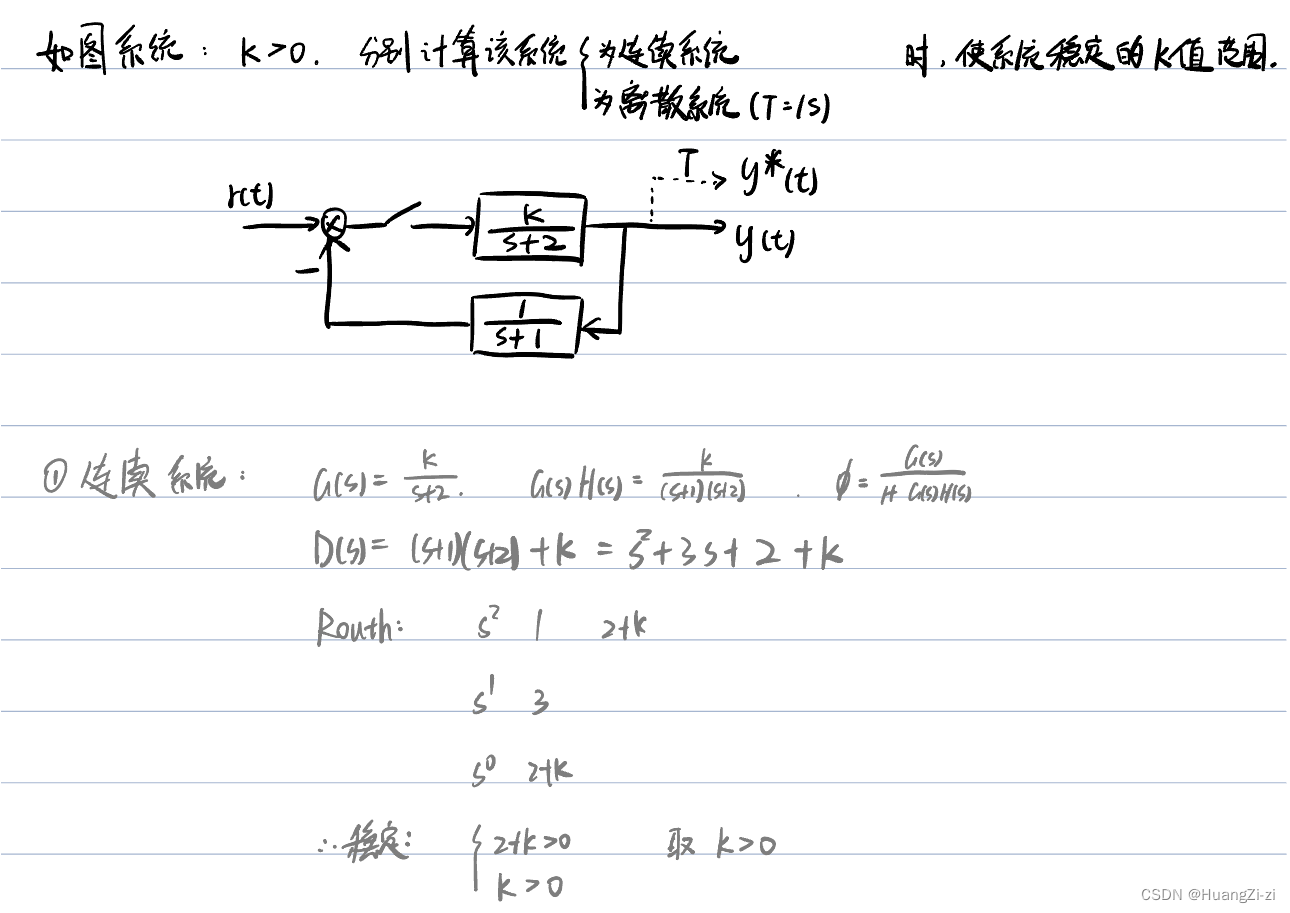

可以看出,采样使得系统的稳定区间变小,不稳定性增加。
但采样周期减小,系统更加接近连续,则这种影响也就减小。
对于特征方程二次的系统,
D
(
z
)
=
z
2
+
A
z
+
B
=
0
D(z)=z^2+Az+B=0
D(z)=z2+Az+B=0,
如果满足:
∣
D
(
0
)
∣
=
∣
B
∣
<
1
D
(
1
)
=
1
+
A
+
B
>
0
D
(
−
1
)
=
1
−
A
+
B
>
0
\begin{aligned} &|D(0)|=|B|<1\\ &D(1)=1+A+B>0\\ &D(-1)=1-A+B>0 \end{aligned}
∣D(0)∣=∣B∣<1D(1)=1+A+B>0D(−1)=1−A+B>0
则系统稳定。
Jury判据
相比与劳斯判据,不需要进行W变换。但缺点是只能判断是否稳定,而无法给出不稳定极点的个数。
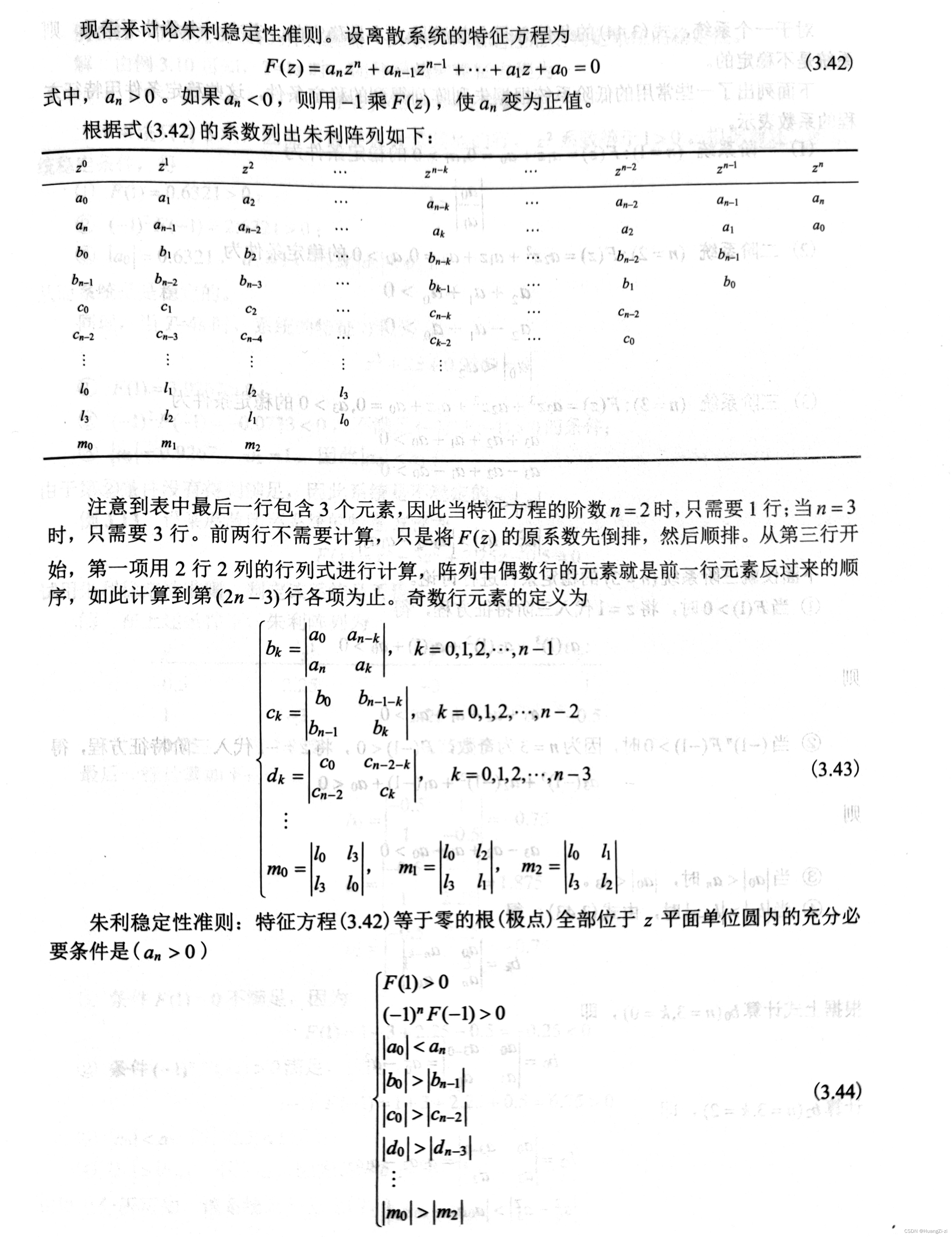
「图源:刘建昌_计算机控制系统」
离散Nyquist判据
(了解)
特征方程:
1
+
k
D
(
z
)
G
(
z
)
=
0
1+kD(z)G(z)=0
1+kD(z)G(z)=0
- 确定 k D ( z ) G ( z ) kD(z)G(z) kD(z)G(z)的不稳定极点数p
- 代入 z = e j ω T z=e^{j \omega T} z=ejωT,在 0 ≤ ω T ≤ 2 π 0 \le \omega T \le2\pi 0≤ωT≤2π范围内,画出开环幅相频率特性曲线
- 计算曲线顺时针包围 z = − 1 z=-1 z=−1的圈数 n n n
- q = p − n q=p-n q=p−n,若 q = 0 q=0 q=0,则稳定
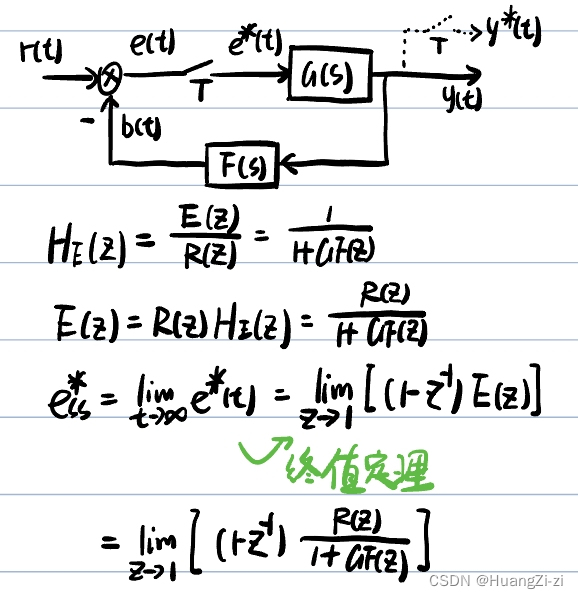
稳态误差
离散系统的稳态误差和连续系统的非常相近,可以对照进行理解
由此可以看出,稳态误差与以下因素都有关:
- 系统本身的结构参数
- 输入的形式和幅值
- 采样周期T
通过定义和终值定理求稳态误差:
静态误差系数
型别的划分:
系统开环传递函数分母包含
(
z
−
1
)
(z-1)
(z−1)的阶数称为型别(
z
=
1
z=1
z=1的极点数)
因此开环传递函数可以写成:
1
(
z
−
1
)
v
A
(
z
)
B
(
z
)
\displaystyle \frac{1}{(z-1)^v}\frac{A(z)}{B(z)}
(z−1)v1B(z)A(z),其中v为系统型别
稳态误差:
| 型别v | essp | essv | essa |
|---|---|---|---|
| 0 | A 1 + K p \frac{A}{1+K_p} 1+KpA | ∞ \infty ∞ | ∞ \infty ∞ |
| 1 | 0 | A K v \frac{A}{K_v} KvA | ∞ \infty ∞ |
| 2 | 0 | 0 | A K a \frac{A}{K_a} KaA |
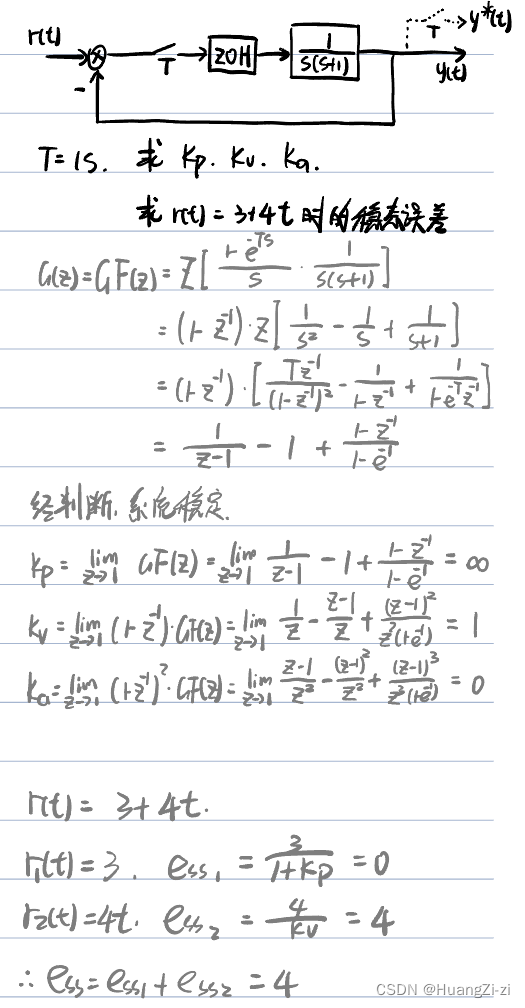
需要注意的是,静态误差系数的计算不能直接读取增益了,而要根据Z变换的结果来求:
K
p
=
lim
z
→
1
G
F
(
z
)
K
v
=
lim
z
→
1
(
1
−
z
−
1
)
G
F
(
z
)
T
K
a
=
lim
z
→
1
(
1
−
z
−
1
)
2
G
F
(
z
)
T
2
\begin{aligned} &K_p=\lim_{z\to 1}GF(z)\\ &K_v=\lim_{z\to 1} \frac{(1-z^{-1})GF(z)}{T}\\ &K_a=\lim_{z\to 1} \frac{(1-z^{-1})^2GF(z)}{T^2} \end{aligned}
Kp=z→1limGF(z)Kv=z→1limT(1−z−1)GF(z)Ka=z→1limT2(1−z−1)2GF(z)
解释:
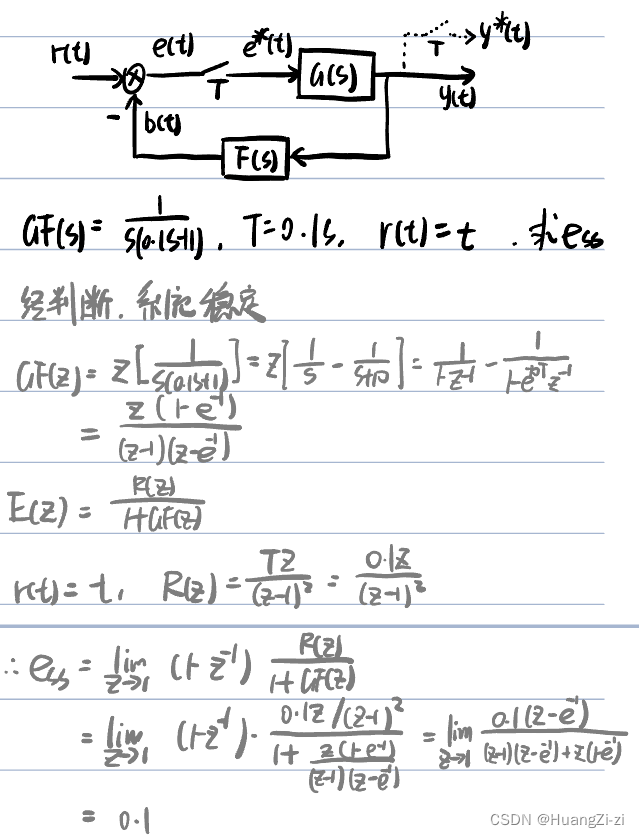
- 只有系统稳定才能求稳态误差(计算之前先判稳)
- 稳态误差为 ∞ \infty ∞,并不表示系统不稳定。而是表示系统无法跟踪输入
动态过程
动态特性主要考虑单位阶跃响应。
和连续情况相似,时域的动态性能指标也包括超调量、上升时间、峰值时间、调节时间等等。
但是各个指标的取值是从系统阶跃响应的采样中得到的,因此根据采样的不同,各个值也会不同。
和连续情况类似,时间响应由闭环极点在Z平面的位置决定。
闭环极点与单位脉冲响应:
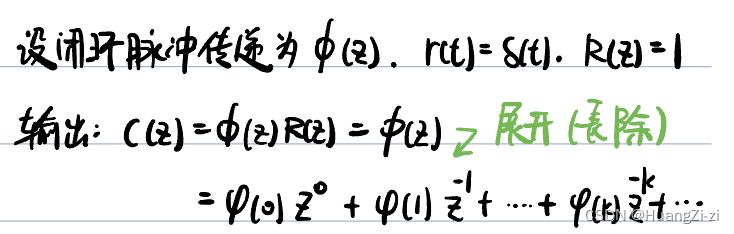
其中
φ
(
k
)
=
∑
i
=
0
n
Res
[
ϕ
(
z
)
z
k
−
1
]
z
=
z
i
\displaystyle \varphi(k)=\sum_{i=0}^n \text{Res}[\rm \phi(z)z^{k-1}]_{z=z_i}
φ(k)=i=0∑nRes[ϕ(z)zk−1]z=zi
因此求出
φ
(
k
)
\varphi(k)
φ(k),再用Z反变换,就可以求出时间响应。
-
脉冲传函只有一个简单的实极点
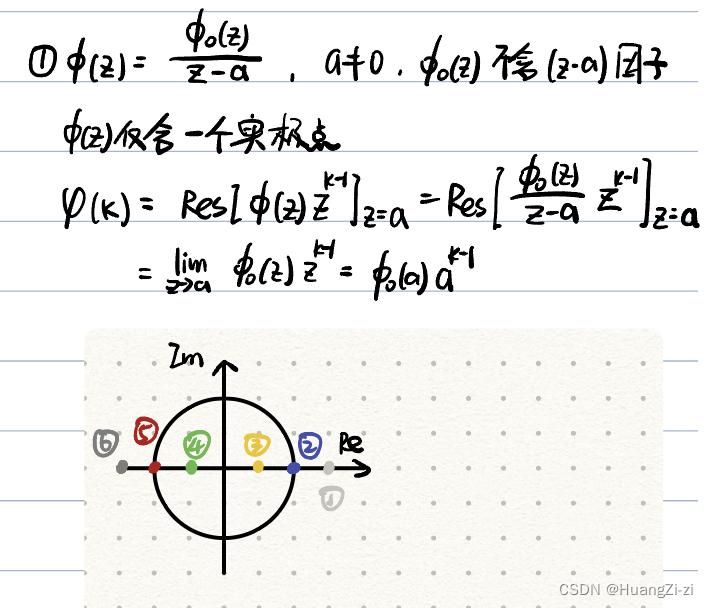
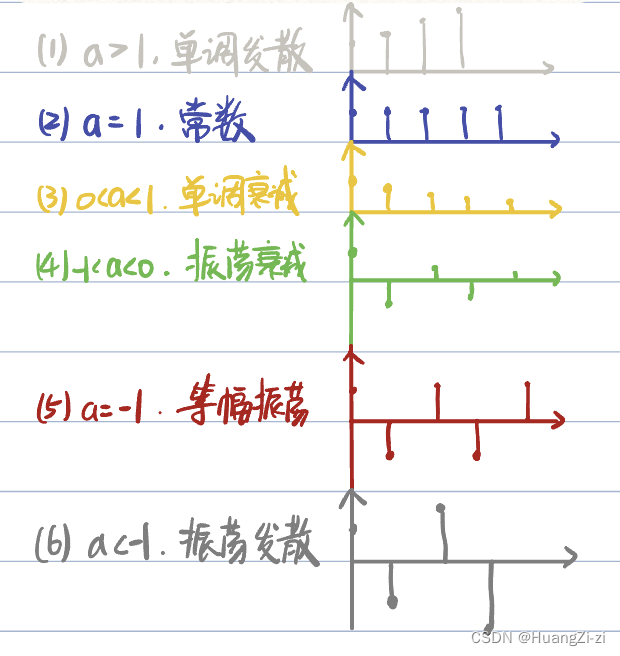
极点越靠近0,衰减越快 -
脉冲传函仅含一对共轭复极点
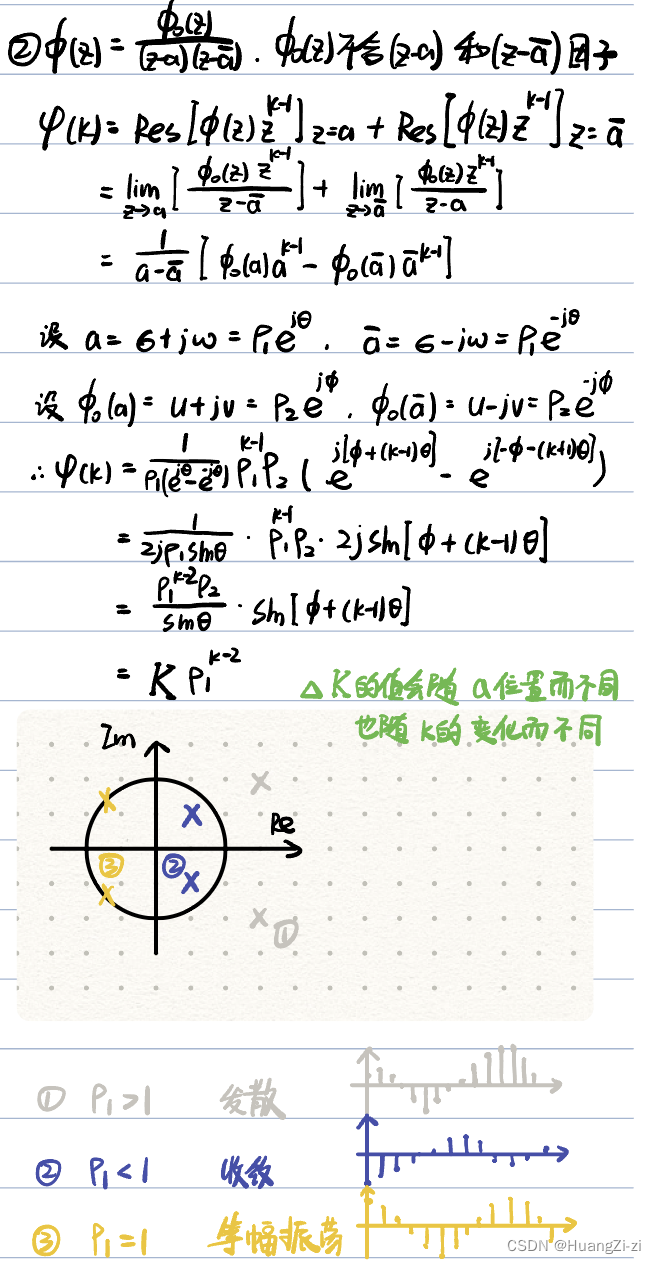
ρ 1 = ∣ a ∣ \rho_1=|a| ρ1=∣a∣,两个极点越靠近原点, ρ 1 \rho_1 ρ1越小,衰减越快,过渡过程影响越小。
θ \theta θ增大,震荡频率增大。 θ = 180 ° \theta=180 \degree θ=180°震荡频率最高。 -
脉冲传函所有极点都在Z平面原点
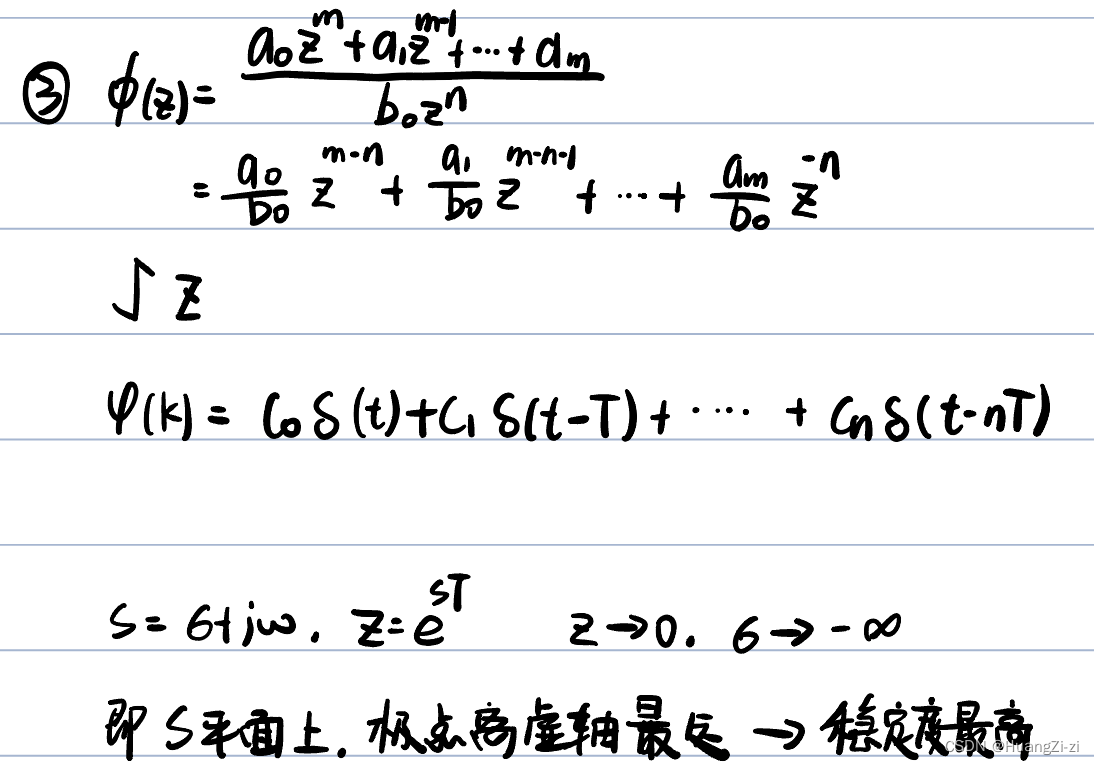
φ ( k ) \varphi(k) φ(k)只有有限项,也即在单位脉冲作用下,响应在 n T nT nT内结束。
当采样频率一定,该系统具有最短的过渡过程,称为时间最优系统或者最小拍系统
所有极点都在原点,稳定性最高。但该条件苛刻,且系统参数变化会使控制性能变差。
频率特性
(了解)
连续系统频率特性:沿虚轴看,
s
=
j
ω
s=j\omega
s=jω
离散系统频率特性:沿单位圆看,
z
=
e
j
ω
T
z=e^{j\omega T}
z=ejωT
- ω T \omega T ωT沿单位圆转一圈,频率特性重复一次
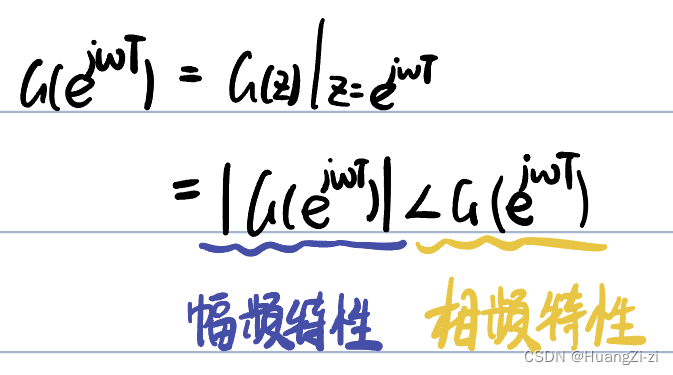
- ∣ G ( e j ω T ) ∣ |G(e^{j\omega T})| ∣G(ejωT)∣是 ω \omega ω的偶函数,且沿 ω s 2 \frac{\omega_s}{2} 2ωs对称
- ∠ G ( e j ω T ) \angle G(e^{j \omega T}) ∠G(ejωT)是 ω \omega ω的奇函数
- G ( e j ω T ) G(e^{j\omega T}) G(ejωT)不是 ω \omega ω的有理分式函数,不能画出对数幅频特性。但频率轴仍可以用对数座标。
- 离散环节频率特性形状与连续环节相差较大。尤其是T较大时