三电技术之电控技术

1 基本功能
整车控制系统能够实现对汽车动力、舒适度、安全性以及能耗等多方面进行调整优化,配合大数据让电动汽车拥有更好的操作性和可靠性,具体来讲整车控制器对电动汽车主要有以下功能:
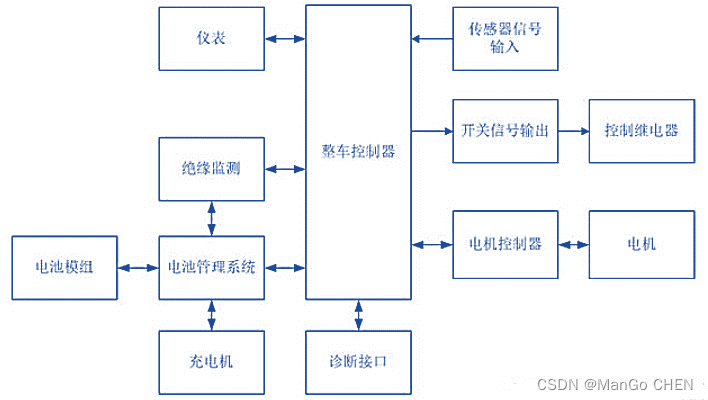
数据交互管理:整车控制器要实时采集驾驶员的操作信息和其他各个部件的工作状态信息,这是实现整车控制器其他功能的基础和前提。该层接受 CAN 总线的信息,对直接馈入整车控制器的物理层进行采样处理,并且通过CAB 发送控制命令,通过 I/O、D/A 和 PWM 提供对显示单元、继电器等的驱动信号。
安全故障管理层:实车运行中,任何部件都可能产生差错,从而可能导致器件损坏甚至危及车辆安全。电动汽车控制器要能对汽车各种可能的故障进行分析处理,这是保证汽车行驶安全的必备条件。对车辆而言,故障可能出
现在任何地方,但对整车控制器而言,故障只体现在第一层中继承的数据中。对继承的数据进行分析判断将是该
层的主要工作之一。在检测出错误后,该层会做出相应的处理,在保证车辆足够安全的条件下,给各部件提供可
使用的工作范围,以便尽可能地满足驾驶员的驾驶意图。
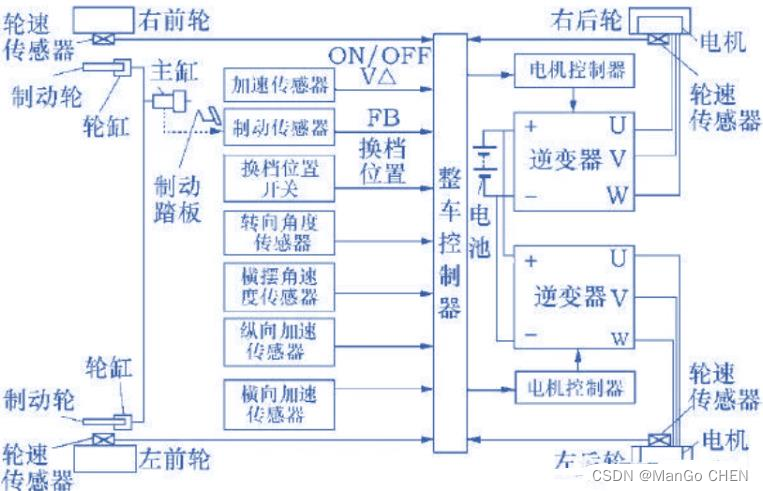
驾驶员意图层:驾驶员的所有与驱动驾驶相关的操作信号都直接进入整车控制器,整车控制器对采集的驾驶员操作信息进行正确的分析处理,计算出驱动系统的目标转矩和车辆的需求功率来实现驾驶员的意图。
能量流管理层:该层的主要工作是电动汽车控制器在多个能量源之间进行需求功率分配,这是提高燃料电池及电动汽车经济性的必要途径。
2 主要功能模块
1.汽车驱动控制
根据司机要求、车辆状态等工况,合理控制电机的工作状态及功率输出,满足驾驶工况要求。包括加减速、恒
速、制动和后退的工况。
2.制动能量回馈控制
根据制动踏板和加速踏板信息、车辆行驶信息、动力电池装状态信息,判断制动模式,计算制动力矩分配,回收
部分能量。
3.整车能量优化
通过对电动汽车的电机驱动系统、电池管理系统、传动系统以及其他车载耗能部件的协调和管理,获得最佳的能
量利用率,延长使用。
4.故障诊断和保护
进行故障诊断,并及时进行相应的安全保护处理,故障码的存储和回调。
5.网络管理
组织信息传输,网络状态监控,网络节点管理等。
6. 车辆状态监视
将各自管辖对象的状态信息和故障诊断信息发至总线,由整车控制器通过综合数仪表显示
出来。
3 技术知识要点
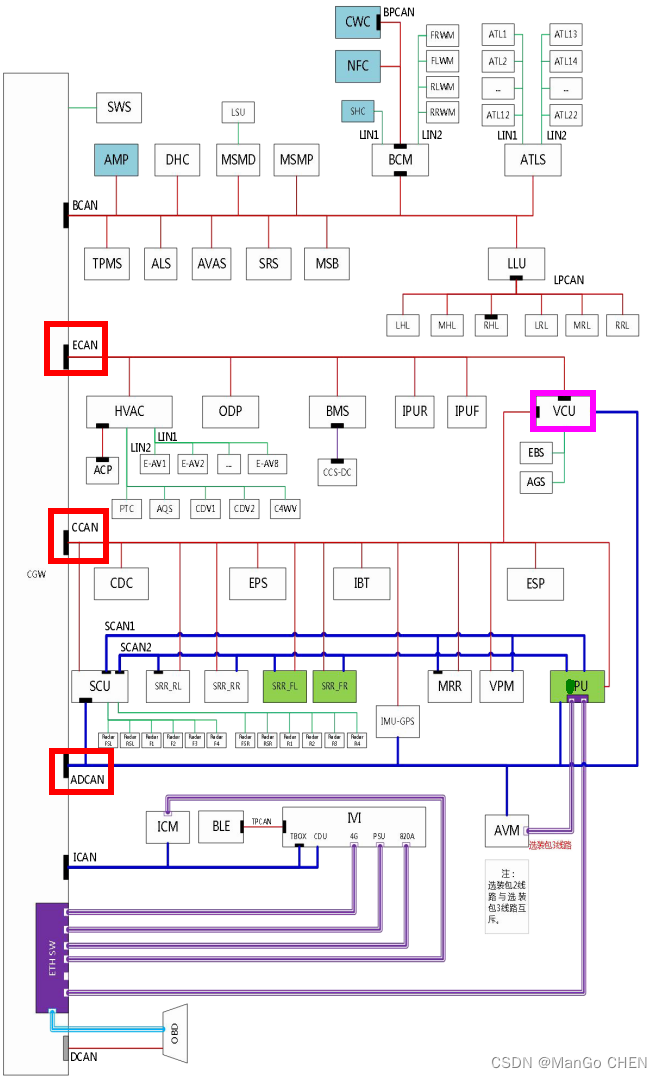
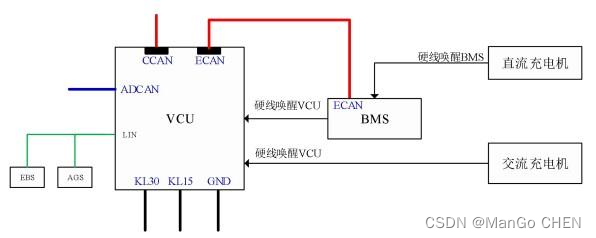
整车网络拓扑中的 VCU
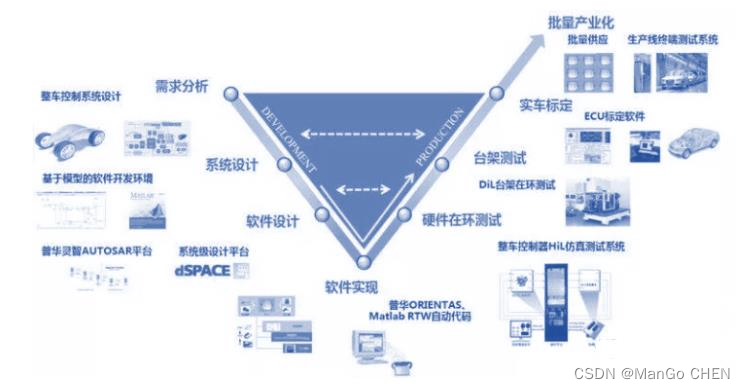
VCU 开发模式
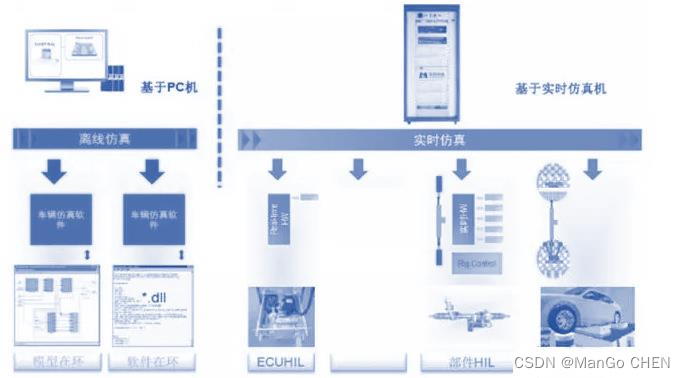
VCU 开发主要采用“V”模式,所有控制策略与仿真模型都是利用框图化的基本模块建立起来的,主要包括控制方案
的设计、离线仿真、快速控制原型、产品自动代码生成及集成、硬件在环仿真测试和标定(台架及道路实车测试标
定),如图所示。
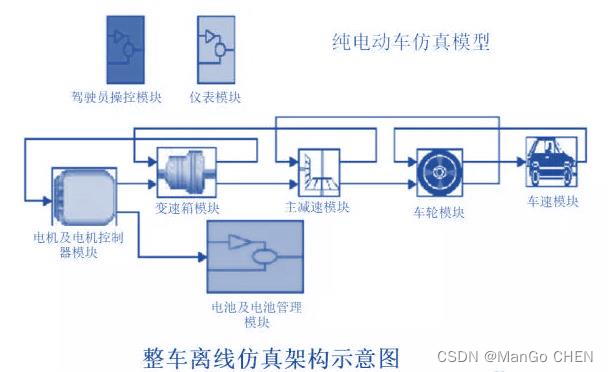
1.离线仿真阶段
建立对象数学模型。
设计控制方案。
以 Matlab 或者 RTC 为平台建立模型并进行仿真分析、测试,
如图所示。
2.快速控制原型阶段
保留需要下载到 dSPACE 或者 Motoron 等快速原型的模块中。
用硬件接口关系代替原来的逻辑连接。
对 I/O 进行配置。
3.自动代码生成及集成阶段
1)利用 Matlab 自带的 RTW 或者商业的 Target Link 工具将整车控制策略模型自动生成 C 代码。
2)利用 code warrir 或者 GNU 等软件集成工具,将控制策略生
成的 C 代码应与 VCU 硬件底层程序集成。
3)通过 bootloader 自动下载到 VCU 硬件系统中。
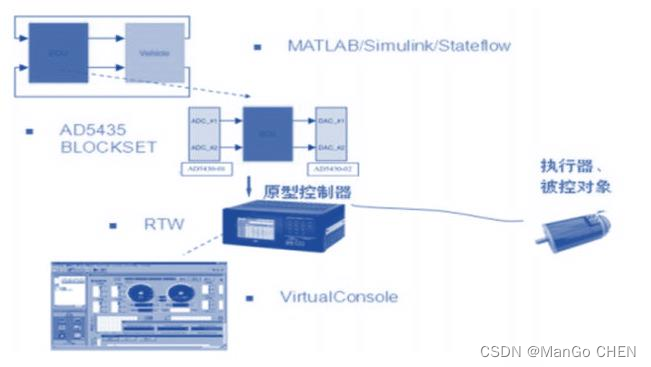
4.硬件在环(HIL)仿真
**硬件在环(Hardware-in-loop,HIL)**即指由硬件控制器与模拟器之间形成一个以数据、信号进行交流的闭环测试系统。通过虚拟的整车驾驶环境、道路环境的建立,与实际的控制器硬件之间建立循环系统,测试该控制器在虚拟环境下的各种功能。如下图所示。
5.标定
基于 CAN 总线的标定协议 CAN Calibration Protocol,(CCP)是一个连接开发工具和 VCU 的软件接口协议,该协议定义了模块标定、数据采集和存取 flash 中运行数据的方法,在整车控制策略中,可以利用 CCP 实现以下功能:
实时在线测试;
各传感器检测和标定;
报警或出错值的调整;
程序下载。