资源地址:
基于模型预测控制(MPC)的永磁同步电机Matlab代码-电子商务文档类资源-CSDN文库
主要内容:
包含单电流环MPC仿真(仅电流环使用MPC策略,速度环使用PI调节器)、速度环和电流环MPC仿真(速度环和电流环均使用MPC策略,非级联)。
不是仿真模型,是程序。采用数学建模方式编写的程序。注释非常清晰!!
部分程序:
%% 单输入多输出-位置速度MPC
% 状态量:id、iq、速度
% 输入: ud、uq
% 输出:id、iq、速度
%% 电机参数初始化
v_ref = 100; % 参考速度
Rs = 0.156; % 定子电阻
Ls = 53e-6; % d、q轴电感
Ts = 1/20000; % 采样时间
flux = 0.0016745; % 磁链
pn = 14; % 极对数
J = 0.0007; % 转动惯量
b = 0.00008 ; % 粘滞系数
Kt = 0.035; % 扭矩常数
Tl = 0.25; %负载转矩
%% 初始化
p = 6;
m = 5;
nc = 3;
nu = 2;
B = [Ts/Ls 0; 0 Ts/Ls;0 0];
C = eye(nc);
x0 = zeros(nc,1);
% 声明u来保存每一步采用的控制量
u = [];
x = x0;
xk = x0;
xk_1 = x0;
u_k_1 = zeros(nu,1);
R=zeros(nc*p,1);
wm=[];
wm(1) = 0;
id_ref=0;
iq_ref=Tl/Kt;
id = 0;
iq = 0;
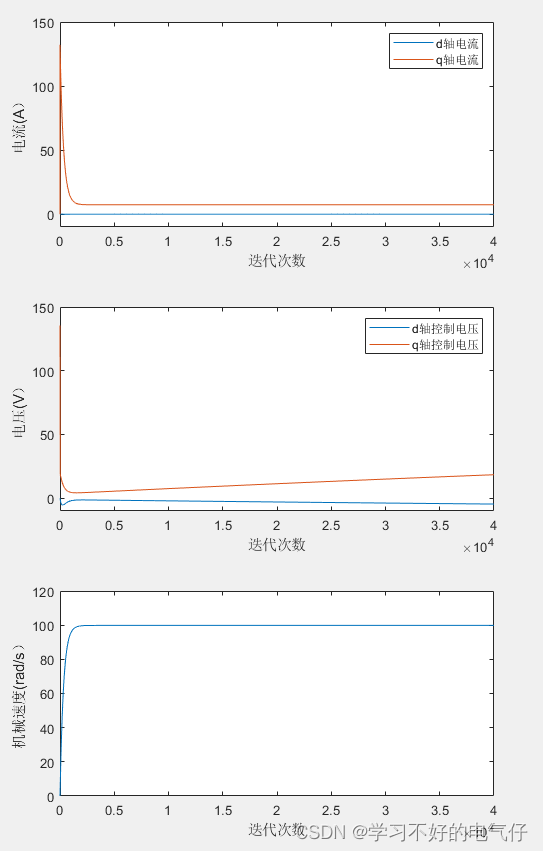
num = 4e4 ;
电流环MPC输出结果:
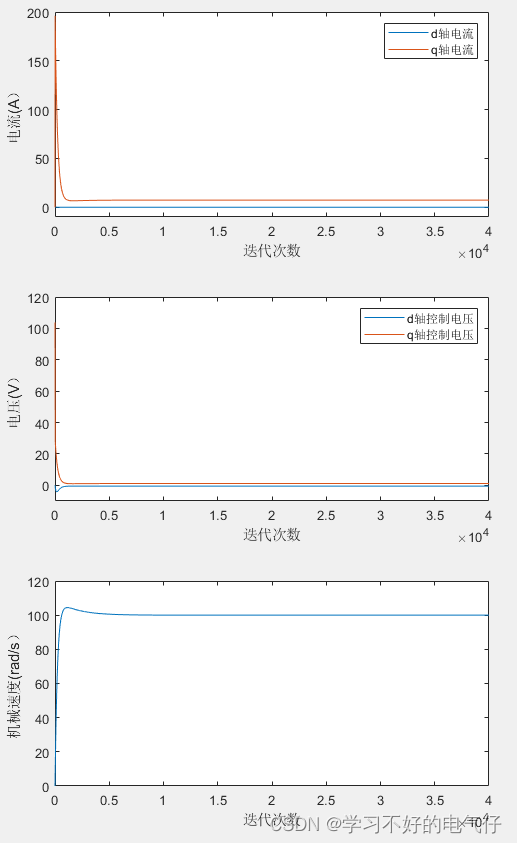
电流环与速度环MPC输出结果: