第一种方法:使用标准C库,但使用标准C库你必须关闭半主机模式
(1)添加下面代码就是关闭半主机模式
/* 告知连接器不从C库链接使用半主机的函数 */
#pragma import(__use_no_semihosting)
/* 定义 _sys_exit() 以避免使用半主机模式 */
void _sys_exit(int x)
{
x = x;
}
/* 标准库需要的支持类型 */
struct __FILE
{
int handle;
};
FILE __stdout;
在独立应用程序中,不可能支持半主机操作。 因此,必须确保应用程序中没有链接 C 库半主机函数。
为确保没有从 C 库链接使用半主机的函数, 必须导入符号 __use_no_semihosting 。
可在工程的任何 C 或汇编语言源文件中执行此操作,如下所示:
在 C 模块中,使用 #pragma 指令:
#pragma import(__use_no_semihosting)
在汇编语言模块中,使用 IMPORT 指令:
IMPORT __use_no_semihosting
(2)串口重定向
将你要输出信息的串口添加到这句函数里面
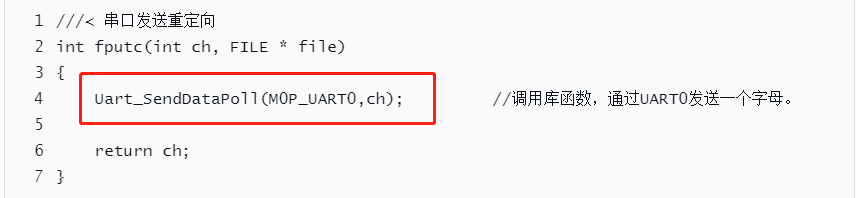
///< 串口发送重定向
int fputc(int ch, FILE * file)
{
Uart_SendDataPoll(M0P_UART0,ch); //调用库函数,通过UART0发送一个字母。
return ch;
}如果是不同型号的MCU,或者使用那个串口更改对应的串口号即可
接下来你就自己配置好对应的串口初始化就OK了
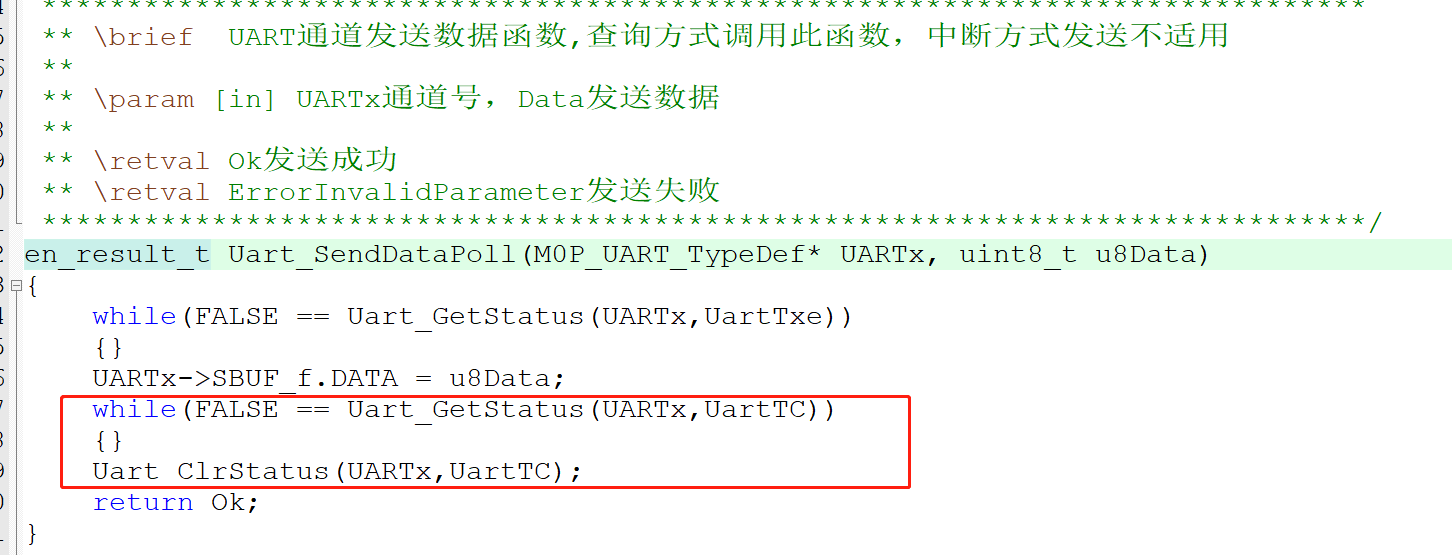
这里需要注意下:本文代码我采用华大HC32L系列的,它这个库函数Uart_SendDataPoll(M0P_UART0,ch)里面是有等待数据发送完毕的
如果你用的是STM32单片机,重定向函数应该这么写
//< 串口发送重定向
int fputc(int ch, FILE * file)
{
USART_SendData(USART1,ch);
while(USART_GetFlagStatus(USART1,USART_FLAG_TC)!=SET);//等待发送结束
return ch;
}
需要自己在添加一行代码来等待发送完毕,因为ST发送库函数里面没有等待语句
(3)下面是我自己完整的配置(我是使用串口0)
#include "BSP_GPIO.h"
#include "BSP_Uart.h"
//#include "UFD.h"
uint8_t u8Rx0Data;
/* 告知连接器不从C库链接使用半主机的函数 */
#pragma import(__use_no_semihosting)
/* 定义 _sys_exit() 以避免使用半主机模式 */
void _sys_exit(int x)
{
x = x;
}
/* 标准库需要的支持类型 */
struct __FILE
{
int handle;
};
FILE __stdout;
///< 串口发送重定向
int fputc(int ch, FILE * file)
{
Uart_SendDataPoll(M0P_UART0,ch); //调用库函数,通过UART0发送一个字母。
return ch;
}
static void Uart0_PortInit(void)
{
stc_gpio_cfg_t stcGpioCfg;
///< 打开GPIO外设时钟门控
Sysctrl_SetPeripheralGate(SysctrlPeripheralGpio, TRUE);
DDL_ZERO_STRUCT(stcGpioCfg);
///< 端口方向配置 UART0_TXD
stcGpioCfg.enDir = GpioDirOut;
Gpio_Init(PORT_DEBUG_TXD,PIN_DEBUG_TXD,&stcGpioCfg);
Gpio_SetAfMode(PORT_DEBUG_TXD,PIN_DEBUG_TXD,GpioAf2);//UART0_TXD
///< 端口方向配置 UART0_RXD
stcGpioCfg.enDir = GpioDirIn;
///< 端口上下拉配置->上拉
stcGpioCfg.enPu = GpioPuEnable;
Gpio_Init(PORT_DEBUG_RXD,PIN_DEBUG_RXD,&stcGpioCfg);
Gpio_SetAfMode(PORT_DEBUG_RXD,PIN_DEBUG_RXD,GpioAf2);//UART0_RXD
Sysctrl_SetFunc(SysctrlSWDUseIOEn, TRUE); /*Set SWD port to GPIO mode*/
}
static void Uart0_Init(void)
{
stc_uart_cfg_t stcCfg;
stc_uart_baud_t stcBaud;
DDL_ZERO_STRUCT(stcCfg);
DDL_ZERO_STRUCT(stcBaud);
///< 打开UART0外设时钟门控
Sysctrl_SetPeripheralGate(SysctrlPeripheralUart0,TRUE);
///<UART Init
stcCfg.enRunMode = UartMskMode1; ///<模式1
stcCfg.enStopBit = UartMsk1bit; ///<1bit停止位
stcCfg.enMmdorCk = UartMskDataOrAddr; ///<多机模式时
stcCfg.stcBaud.u32Baud = 1000000; ///<波特率1000000
stcCfg.stcBaud.enClkDiv = UartMsk8Or16Div; ///<通道采样分频配置
stcCfg.stcBaud.u32Pclk = Sysctrl_GetPClkFreq(); ///</<获得外设时钟(PCLK)频率值
Uart_Init(M0P_UART0, &stcCfg); ///<串口初始化
///<UART中断使能
Uart_ClrStatus(M0P_UART0,UartRC); ///<清接收请求
Uart_ClrStatus(M0P_UART0,UartTC); ///<清接收请求
Uart_EnableIrq(M0P_UART0,UartRxIrq); ///<使能串口接收中断
EnableNvic(UART0_2_IRQn, IrqLevel3, TRUE); ///<系统中断使能
}
void BSP_UartInit(void)
{
Uart0_PortInit();
Uart0_Init();
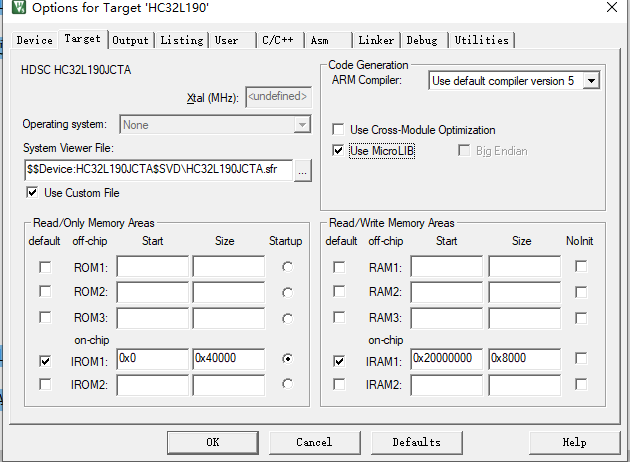
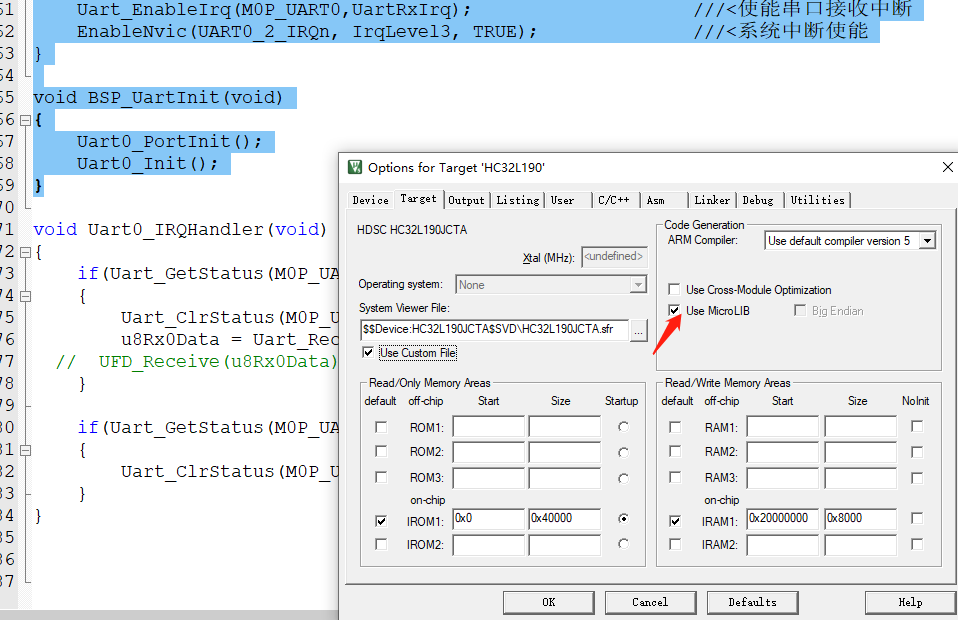
}第二种方法:使用微库,因为使用微库的话 ,不会使用半主机模式,咱也就不用在写那几句关闭半主机模式的语句
(1)在Keil工程中“中勾选 ”Use MicroLIB
(2)重定向输出(这个跟第一种方法一样)
//< 串口发送重定向
int fputc(int ch, FILE * file)
{
Uart_SendDataPoll(M0P_UART0,ch); //调用库函数,通过UART0发送一个字母。
return ch;
}(3)下面是我自己完整的配置(我是使用串口0)
#include "BSP_GPIO.h"
#include "BSP_Uart.h"
//#include "UFD.h"
uint8_t u8Rx0Data;
//< 串口发送重定向
int fputc(int ch, FILE * file)
{
Uart_SendDataPoll(M0P_UART0,ch); //调用库函数,通过UART0发送一个字母。
return ch;
}
static void Uart0_PortInit(void)
{
stc_gpio_cfg_t stcGpioCfg;
///< 打开GPIO外设时钟门控
Sysctrl_SetPeripheralGate(SysctrlPeripheralGpio, TRUE);
DDL_ZERO_STRUCT(stcGpioCfg);
///< 端口方向配置 UART0_TXD
stcGpioCfg.enDir = GpioDirOut;
Gpio_Init(PORT_DEBUG_TXD,PIN_DEBUG_TXD,&stcGpioCfg);
Gpio_SetAfMode(PORT_DEBUG_TXD,PIN_DEBUG_TXD,GpioAf2);//UART0_TXD
///< 端口方向配置 UART0_RXD
stcGpioCfg.enDir = GpioDirIn;
///< 端口上下拉配置->上拉
stcGpioCfg.enPu = GpioPuEnable;
Gpio_Init(PORT_DEBUG_RXD,PIN_DEBUG_RXD,&stcGpioCfg);
Gpio_SetAfMode(PORT_DEBUG_RXD,PIN_DEBUG_RXD,GpioAf2);//UART0_RXD
Sysctrl_SetFunc(SysctrlSWDUseIOEn, TRUE); /*Set SWD port to GPIO mode*/
}
static void Uart0_Init(void)
{
stc_uart_cfg_t stcCfg;
stc_uart_baud_t stcBaud;
DDL_ZERO_STRUCT(stcCfg);
DDL_ZERO_STRUCT(stcBaud);
///< 打开UART0外设时钟门控
Sysctrl_SetPeripheralGate(SysctrlPeripheralUart0,TRUE);
///<UART Init
stcCfg.enRunMode = UartMskMode1; ///<模式1
stcCfg.enStopBit = UartMsk1bit; ///<1bit停止位
stcCfg.enMmdorCk = UartMskDataOrAddr; ///<多机模式时
stcCfg.stcBaud.u32Baud = 1000000; ///<波特率1000000
stcCfg.stcBaud.enClkDiv = UartMsk8Or16Div; ///<通道采样分频配置
stcCfg.stcBaud.u32Pclk = Sysctrl_GetPClkFreq(); ///</<获得外设时钟(PCLK)频率值
Uart_Init(M0P_UART0, &stcCfg); ///<串口初始化
///<UART中断使能
Uart_ClrStatus(M0P_UART0,UartRC); ///<清接收请求
Uart_ClrStatus(M0P_UART0,UartTC); ///<清接收请求
Uart_EnableIrq(M0P_UART0,UartRxIrq); ///<使能串口接收中断
EnableNvic(UART0_2_IRQn, IrqLevel3, TRUE); ///<系统中断使能
}
void BSP_UartInit(void)
{
Uart0_PortInit();
Uart0_Init();
}总结:
要使用第一种还是第二种,看自己选择,大家好像选择第一种比较多。