文章目录
- 激光雷达点云分割
- 1.点云分割主流方案(模型角度)
- 1.1 (a) 基于RGB-D图像
- 1.2 (d) 基于点云
- 1.3 (b) 基于投影图像
- 1.4 (b) 基于投影图像 - SqueezeSeg/RangeNet
- 1.4. 球映射
- 2 点云分割主流方案(部署角度)
- 3 点云分割常用指标
- 4 点云分割主要实现方式/常用trick总结
- 5 点云分割常用数据集
- 6 点云分割主要问题
激光雷达点云分割
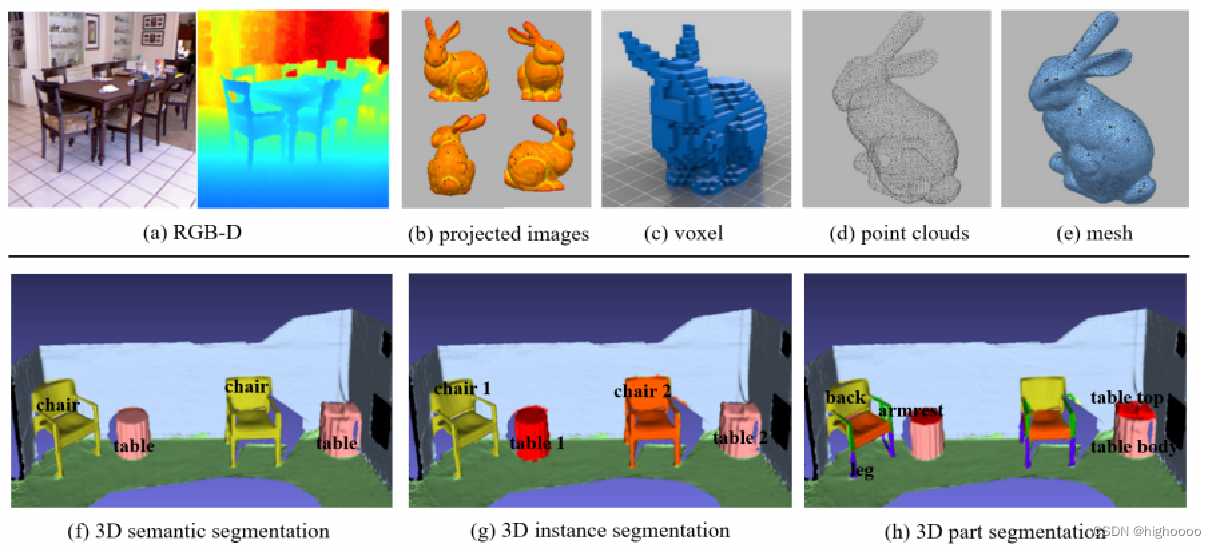
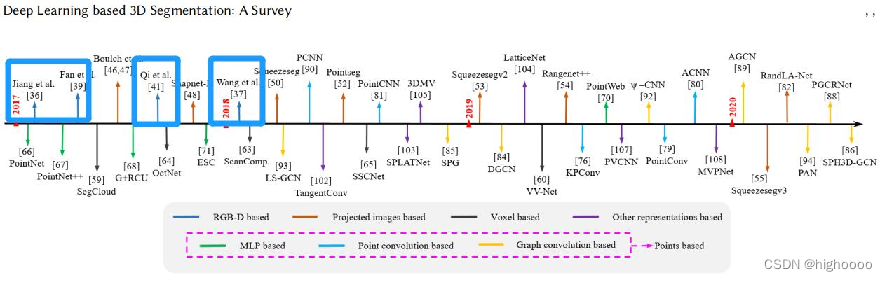
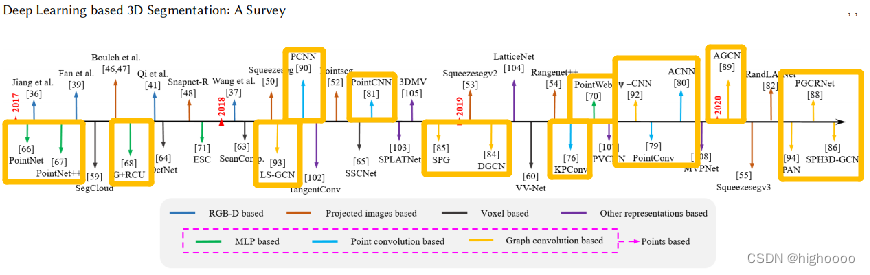
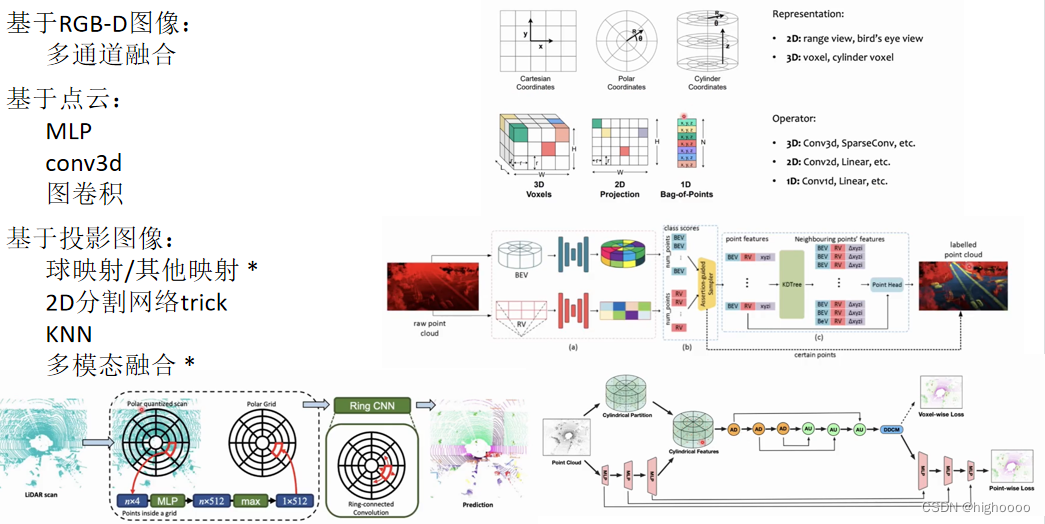
1.点云分割主流方案(模型角度)
(a) 基于RGB-D图像,双通道网络分别对RGB图像和深度图像提取特征
(b) 基于投影图像,2D卷积三维场景/形状投影图像的特征,融合这些特征进行标签预测
(©) 基于体素(像素划分网格),类似于二阶段目标检测操作,寻找proposal体素进行预测
(d) 基于点云,核心是MLP对点云升维在保证平移不变性的情况下保留/提取点云特征,直接对点云预测
(e) 基于mesh(三维网格)……
abd是近年较为主流的方案
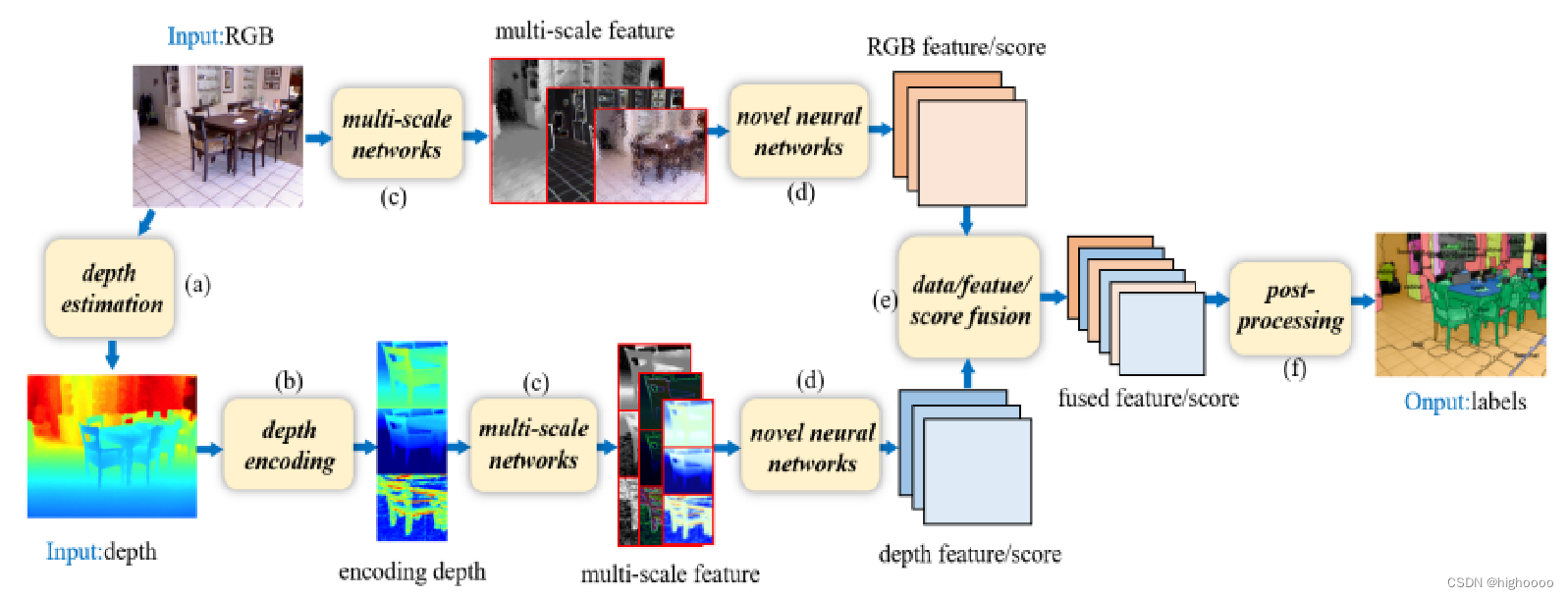
1.1 (a) 基于RGB-D图像
双通道网络分别对RGB图像和深度图像提取特征
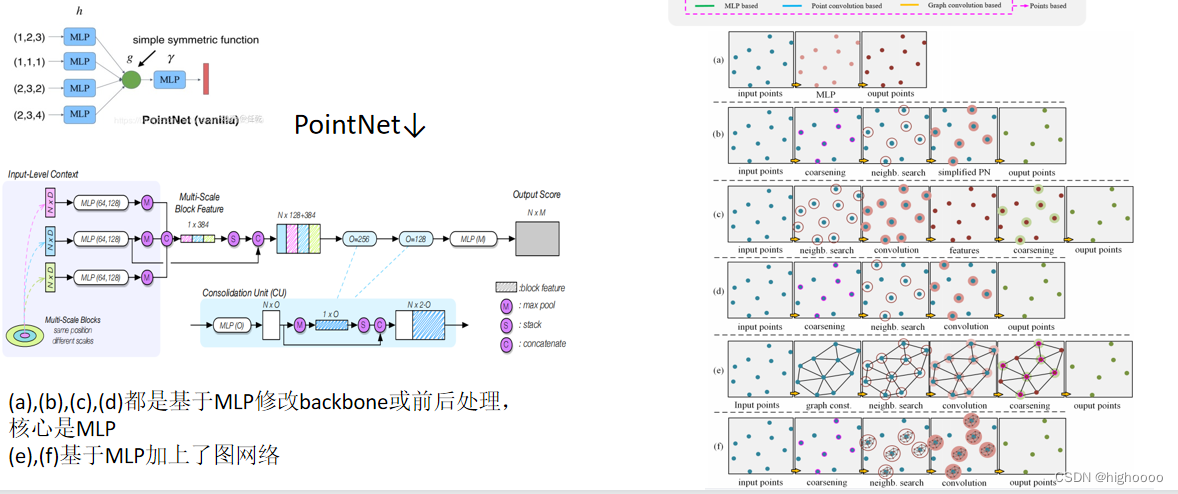
1.2 (d) 基于点云
核心是MLP对点云升维在保证平移不变性的情况下保留/提取点云特征,直接对点云预测
1.3 (b) 基于投影图像
2D卷积三维场景/形状投影图像的特征,融合这些特征进行标签预测
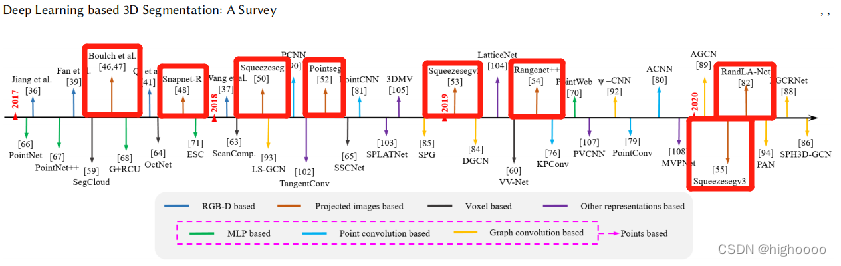
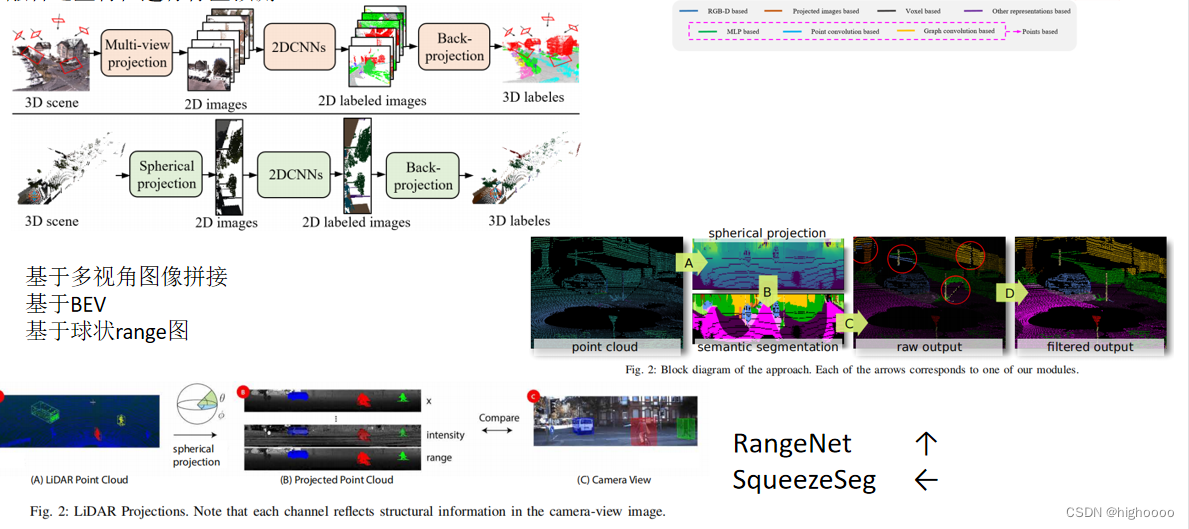
1.4 (b) 基于投影图像 - SqueezeSeg/RangeNet
算法流程:
A: 球映射(Spherical projection)
相同
B: 语义分割(Segmentation)
RangeNet可用SqueezeSeg相同backbone
也可用darknet作为backbone
C: 点云重建(Point cloud reconstruction)
相同
D: 点云后处理(Post-processing)
RangeNet通过KNN search 修正结果
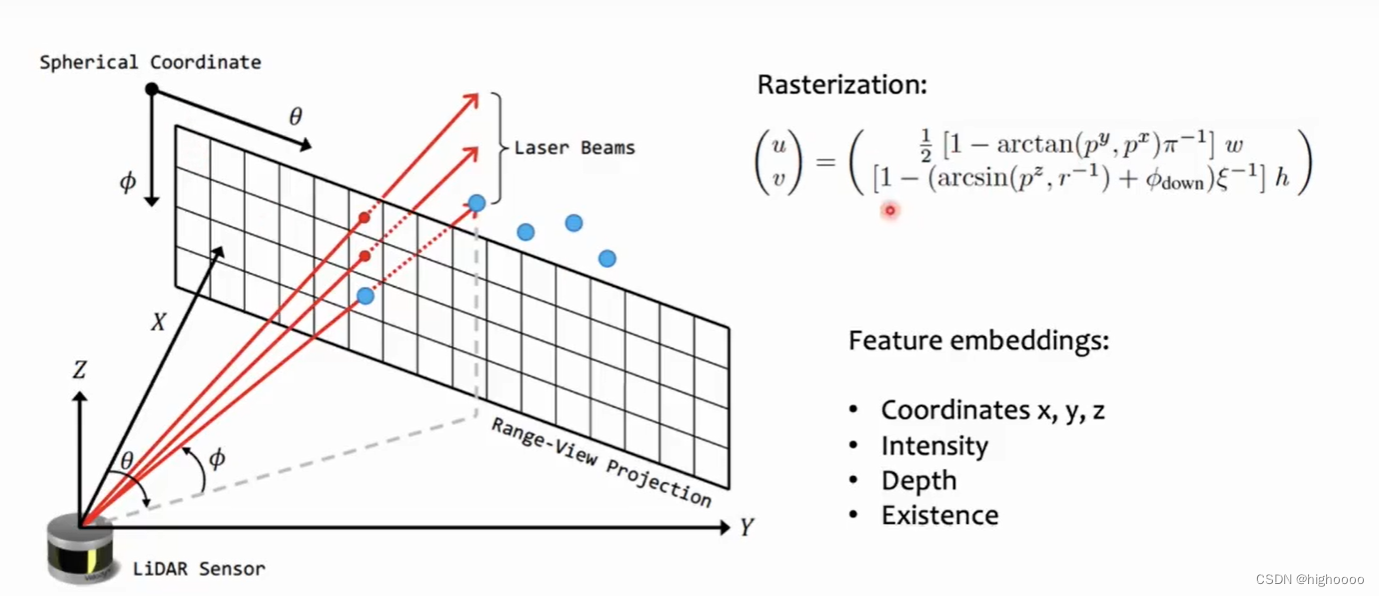
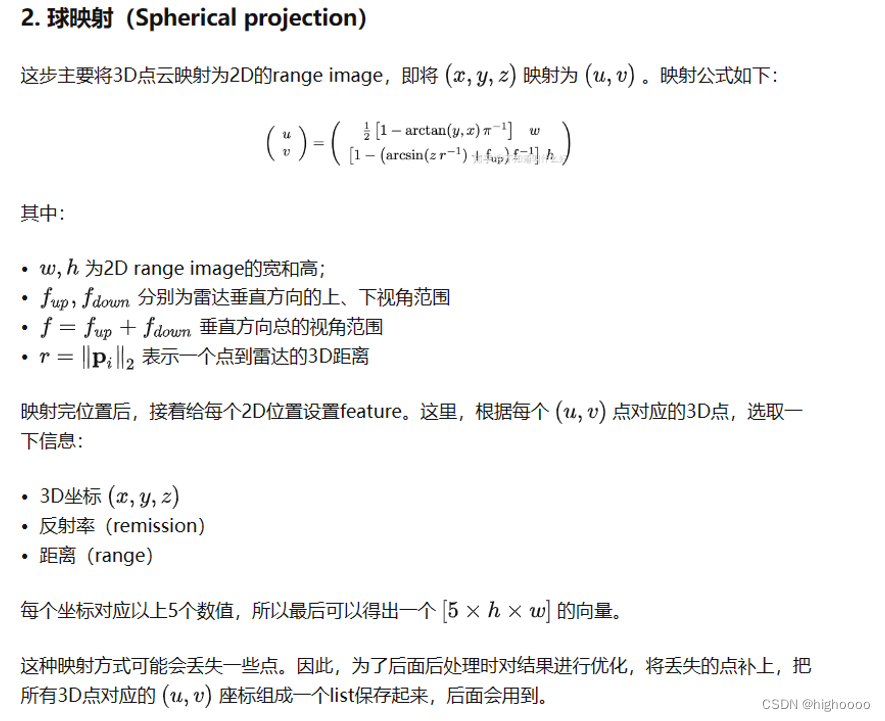
1.4. 球映射
球坐标系
映射算法
2 点云分割主流方案(部署角度)
RangeNet++:推理效率高,部署效率高(TensorRT,已初步走通流程)
SqueezeSeg:推理效率高,无开源部署方案(未测试)
PointNet++:推理效率低,部署效率低(LibTorch/TensorRT,未测试)
*目前只对RangeNet++和PointNet++做了初步测试,还未做各个网络的详细测试,预研阶段性结论
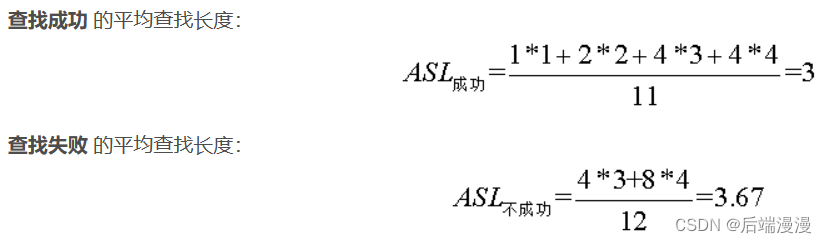
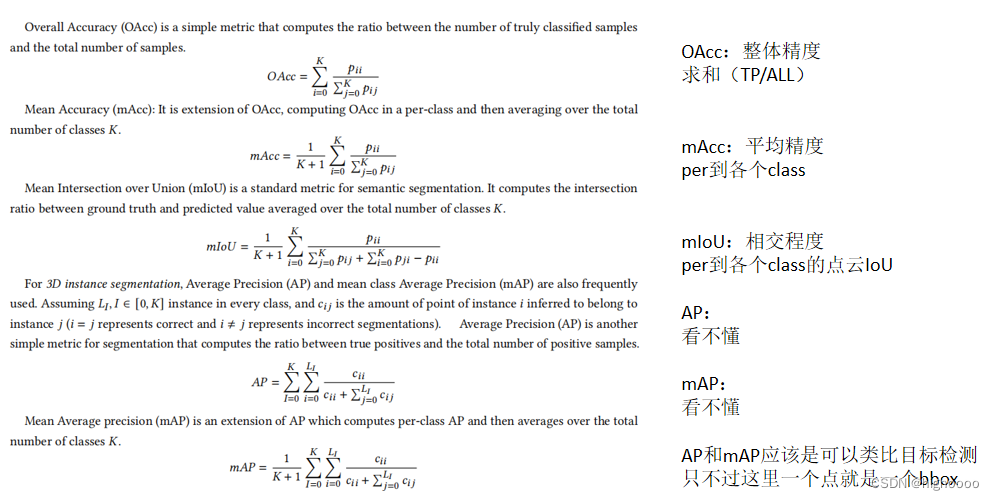
3 点云分割常用指标
4 点云分割主要实现方式/常用trick总结
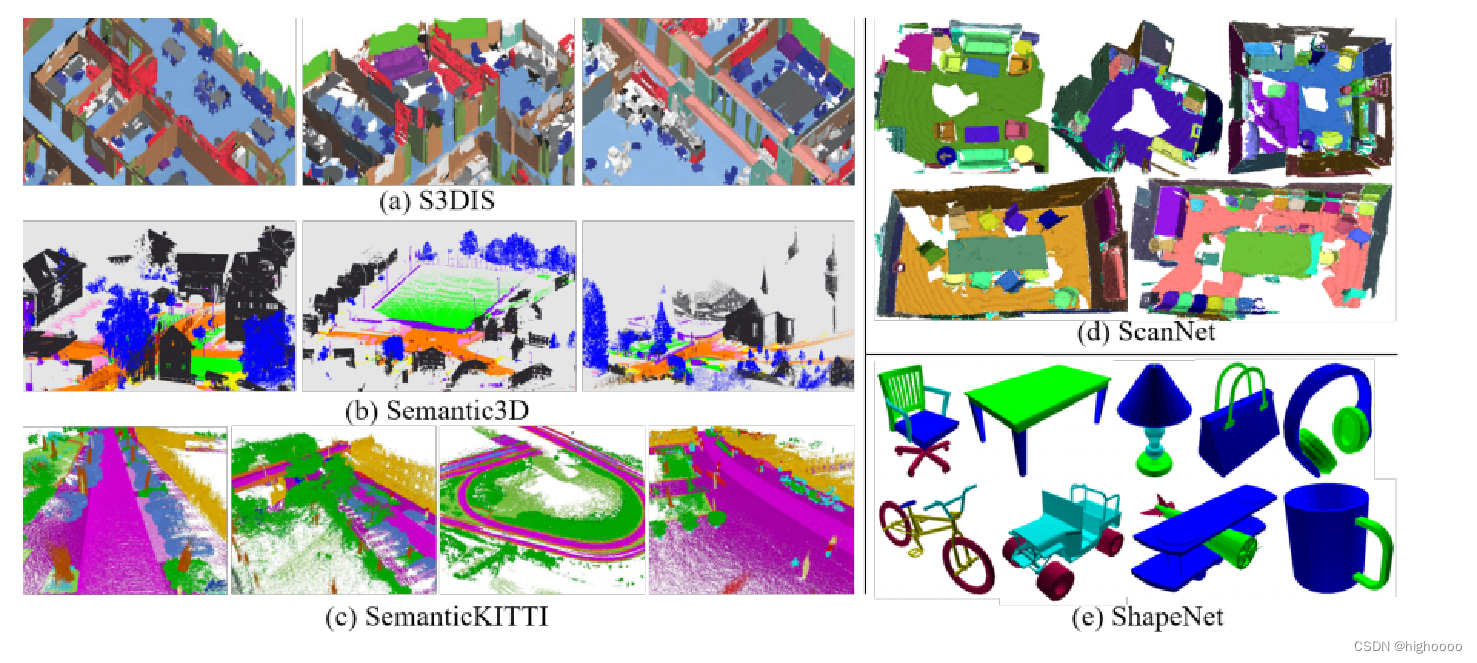
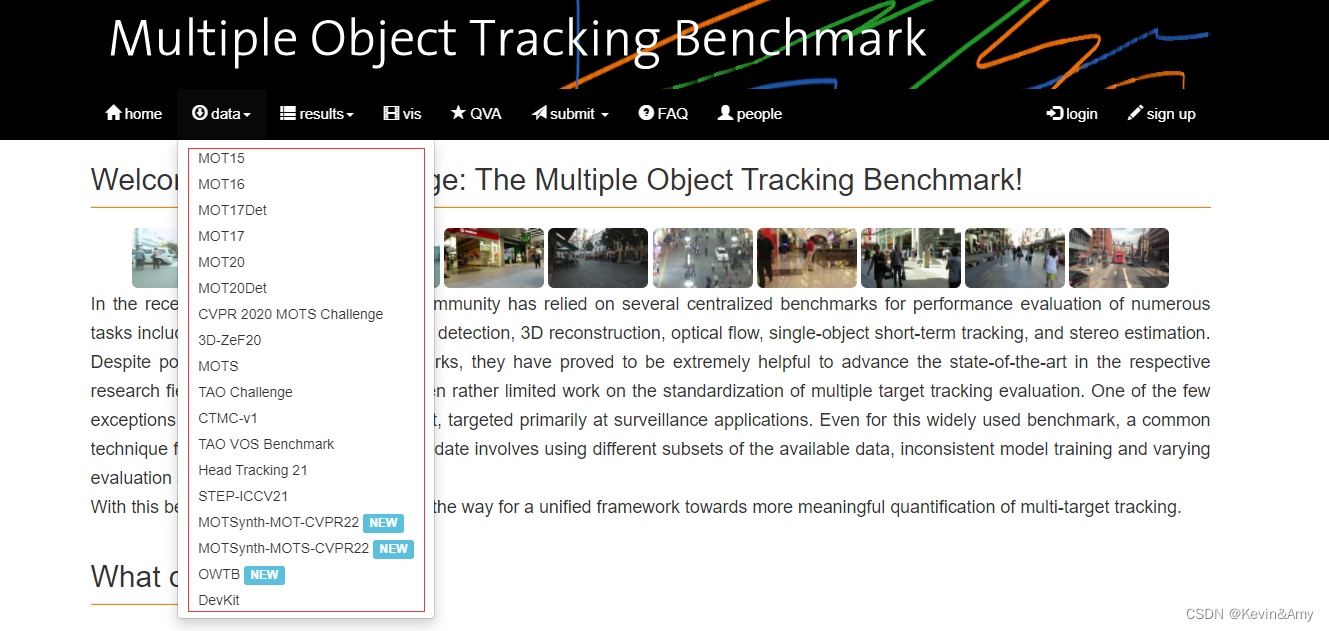
5 点云分割常用数据集
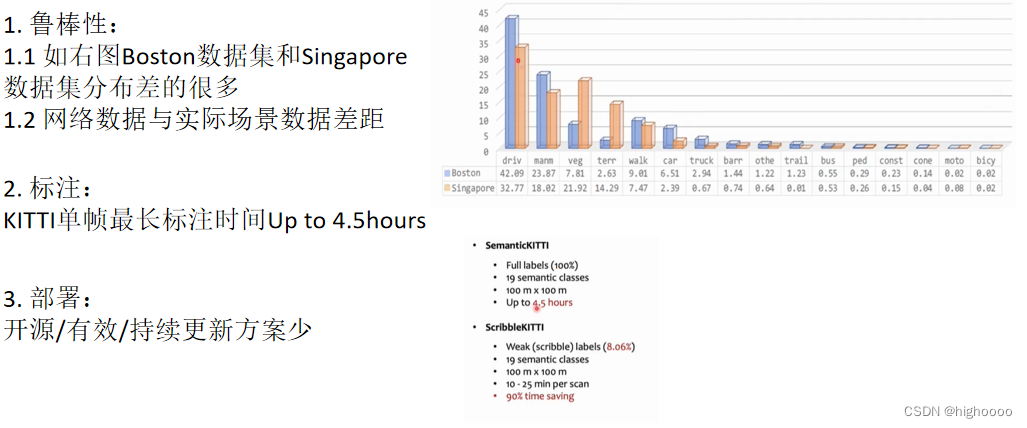
6 点云分割主要问题

![[css]通过网站实例学习以最简单的方式构造三元素布局](https://img-blog.csdnimg.cn/483513eab5b146258ce74d72cd07b65a.png)