Canny算法的原理
使用高斯滤波器滤波
使用 Sobel 滤波器滤波获得在 x 和 y 方向上的输出,在此基础上求出梯度的强度和梯度的角度
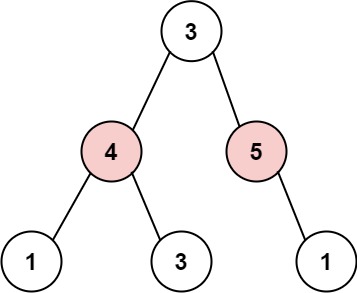
edge为边缘强度,tan为梯度方向
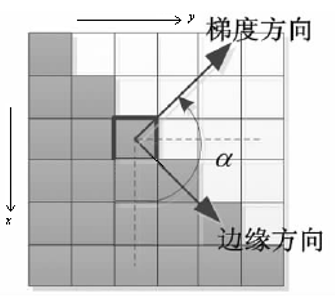
上图表示的是中心点的梯度向量、方位角以及边缘方向(任一点的边缘与梯度向量正交)
对梯度角度进行量化处理
划重点:是沿着梯度方向对幅值进行非极大值抑制,而非边缘方向,这里初学者容易弄混。
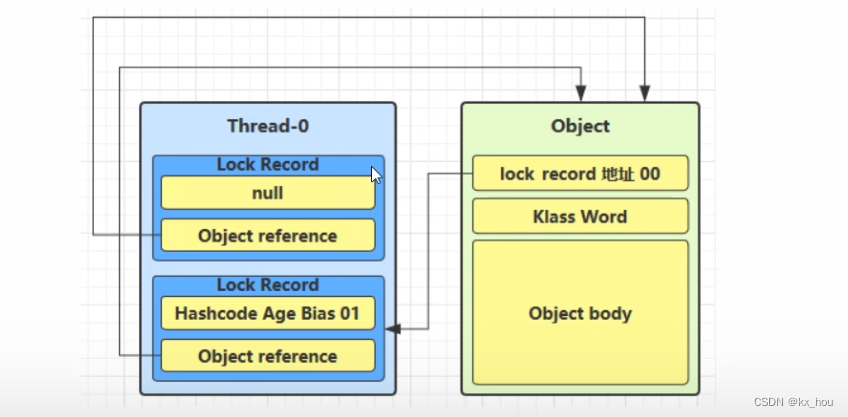
例如:3*3区域内,边缘可以划分为垂直、水平、45°、135°4个方向,同样,梯度反向也为四个方向(与边缘方向正交)。因此为了进行非极大值,将所有可能的方向量化为4个方向,如下图:
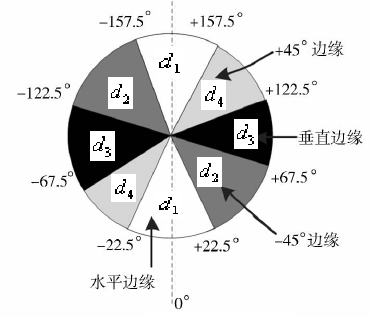
量化后的情况可以总结为:

根据梯度角度对边缘强度进行非极大值抑制(Non-maximum suppression),使图像边缘变得更细
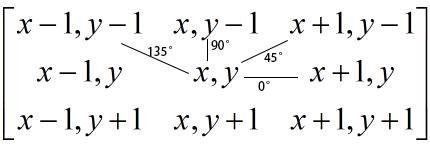
非极大值抑制算法:0°时取(x,y)、(x+1,y)、(x-1,y) 中的最大值,其它角度类似
使用滞后阈值对图像进行二值化处理,优化图像显示效果
选取系数TH和TL,比率为2:1或3:1。(一般取TH=0.3或0.2,TL=0.1);
b. 将小于低阈值的点抛弃,赋0;将大于高阈值的点立即标记(这些点为确定边缘点),赋1或255;
c. 将小于高阈值,大于低阈值的点使用8连通区域确定(即:只有与TH像素连接时才会被接受,成为边缘点,赋 1或255)
python算法实现
import cv2
import numpy as np
import matplotlib.pyplot as plt
def Canny(img):
# Gray scale
def BGR2GRAY(img):
b = img[:, :, 0].copy()
g = img[:, :, 1].copy()
r = img[:, :, 2].copy()
# Gray scale
out = 0.2126 * r + 0.7152 * g + 0.0722 * b
out = out.astype(np.uint8)
return out
# Gaussian filter for grayscale
def gaussian_filter(img, K_size=3, sigma=1.4):
if len(img.shape) == 3:
H, W, C = img.shape
gray = False
else:
img = np.expand_dims(img, axis=-1)
H, W, C = img.shape
gray = True
## Zero padding
pad = K_size // 2
out = np.zeros([H + pad * 2, W + pad * 2, C], dtype=np.float)
out[pad : pad + H, pad : pad + W] = img.copy().astype(np.float)
## prepare Kernel
K = np.zeros((K_size, K_size), dtype=np.float)
for x in range(-pad, -pad + K_size):
for y in range(-pad, -pad + K_size):
K[y + pad, x + pad] = np.exp( - (x ** 2 + y ** 2) / (2 * sigma * sigma))
#K /= (sigma * np.sqrt(2 * np.pi))
K /= (2 * np.pi * sigma * sigma)
K /= K.sum()
tmp = out.copy()
# filtering
for y in range(H):
for x in range(W):
for c in range(C):
out[pad + y, pad + x, c] = np.sum(K * tmp[y : y + K_size, x : x + K_size, c])
out = np.clip(out, 0, 255)
out = out[pad : pad + H, pad : pad + W]
out = out.astype(np.uint8)
if gray:
out = out[..., 0]
return out
# sobel filter
def sobel_filter(img, K_size=3):
if len(img.shape) == 3:
H, W, C = img.shape
else:
H, W = img.shape
# Zero padding
pad = K_size // 2
out = np.zeros((H + pad * 2, W + pad * 2), dtype=np.float)
out[pad : pad + H, pad : pad + W] = img.copy().astype(np.float)
tmp = out.copy()
out_v = out.copy()
out_h = out.copy()
## Sobel vertical
Kv = [[1., 2., 1.],[0., 0., 0.], [-1., -2., -1.]]
## Sobel horizontal
Kh = [[1., 0., -1.],[2., 0., -2.],[1., 0., -1.]]
# filtering
for y in range(H):
for x in range(W):
out_v[pad + y, pad + x] = np.sum(Kv * (tmp[y : y + K_size, x : x + K_size]))
out_h[pad + y, pad + x] = np.sum(Kh * (tmp[y : y + K_size, x : x + K_size]))
out_v = np.clip(out_v, 0, 255)
out_h = np.clip(out_h, 0, 255)
out_v = out_v[pad : pad + H, pad : pad + W]
out_v = out_v.astype(np.uint8)
out_h = out_h[pad : pad + H, pad : pad + W]
out_h = out_h.astype(np.uint8)
return out_v, out_h
# get edge strength and edge angle
def get_edge_angle(fx, fy):
# get edge strength
edge = np.sqrt(np.power(fx.astype(np.float32), 2) + np.power(fy.astype(np.float32), 2))
edge = np.clip(edge, 0, 255)
# make sure the denominator is not 0
fx = np.maximum(fx, 1e-10)
#fx[np.abs(fx) <= 1e-5] = 1e-5
# get edge angle
angle = np.arctan(fy / fx)
return edge, angle
# 将角度量化为0°、45°、90°、135°
def angle_quantization(angle):
angle = angle / np.pi * 180
angle[angle < -22.5] = 180 + angle[angle < -22.5]
_angle = np.zeros_like(angle, dtype=np.uint8)
_angle[np.where((angle <= 22.5) | (angle > 157.5))] = 0
_angle[np.where((angle > 22.5) & (angle <= 67.5))] = 45
_angle[np.where((angle > 67.5) & (angle <= 112.5))] = 90
_angle[np.where((angle > 112.5) & (angle <= 157.5))] = 135
return _angle
def non_maximum_suppression(angle, edge):
H, W = angle.shape
_edge = edge.copy()
for y in range(H):
for x in range(W):
if angle[y, x] == 0:
dx1, dy1, dx2, dy2 = -1, 0, 1, 0
elif angle[y, x] == 45:
dx1, dy1, dx2, dy2 = -1, 1, 1, -1
elif angle[y, x] == 90:
dx1, dy1, dx2, dy2 = 0, -1, 0, 1
elif angle[y, x] == 135:
dx1, dy1, dx2, dy2 = -1, -1, 1, 1
# 边界处理
if x == 0:
dx1 = max(dx1, 0)
dx2 = max(dx2, 0)
if x == W-1:
dx1 = min(dx1, 0)
dx2 = min(dx2, 0)
if y == 0:
dy1 = max(dy1, 0)
dy2 = max(dy2, 0)
if y == H-1:
dy1 = min(dy1, 0)
dy2 = min(dy2, 0)
# 如果不是最大值,则将这个位置像素值置为0
if max(max(edge[y, x], edge[y + dy1, x + dx1]), edge[y + dy2, x + dx2]) != edge[y, x]:
_edge[y, x] = 0
return _edge
# 滞后阈值处理二值化图像
# > HT 的设为255,< LT 的设置0,介于它们两个中间的值,使用8邻域判断法
def hysterisis(edge, HT=100, LT=30):
H, W = edge.shape
# Histeresis threshold
edge[edge >= HT] = 255
edge[edge <= LT] = 0
_edge = np.zeros((H + 2, W + 2), dtype=np.float32)
_edge[1 : H + 1, 1 : W + 1] = edge
## 8 - Nearest neighbor
nn = np.array(((1., 1., 1.), (1., 0., 1.), (1., 1., 1.)), dtype=np.float32)
for y in range(1, H+2):
for x in range(1, W+2):
if _edge[y, x] < LT or _edge[y, x] > HT:
continue
if np.max(_edge[y-1:y+2, x-1:x+2] * nn) >= HT:
_edge[y, x] = 255
else:
_edge[y, x] = 0
edge = _edge[1:H+1, 1:W+1]
return edge
# grayscale
gray = BGR2GRAY(img)
# gaussian filtering
gaussian = gaussian_filter(gray, K_size=5, sigma=1.4)
# sobel filtering
fy, fx = sobel_filter(gaussian, K_size=3)
# get edge strength, angle
edge, angle = get_edge_angle(fx, fy)
# angle quantization
angle = angle_quantization(angle)
# non maximum suppression
edge = non_maximum_suppression(angle, edge)
# hysterisis threshold
out = hysterisis(edge, 80, 20)
return out
if __name__ == '__main__':
# Read image
img = cv2.imread("../paojie.jpg").astype(np.float32)
image = cv2.cvtColor(img, cv2.COLOR_RGB2GRAY).astype(np.uint8)
# Canny
edge = Canny(img)
out = edge.astype(np.uint8)
# Save result
cv2.imshow('src and canny', np.hstack((image, out)))
cv2.waitKey(0)
cv2.destroyAllWindows()
参考链接:
https://www.cnblogs.com/wojianxin/p/12533526.html
https://blog.csdn.net/weixin_40647819/article/details/91411424