Android Camera JNI NDK NDK_vendor介绍
- 前言
- 主要有哪几种interface?
- Android SDK
- Camera API 1
- Camera API 2
- 小结
- Android NDK
- NDK Interface
- NDK Vendor Interface
- 小结
- Camera VTS Testcase
- 总结
- Reference
前言
本篇博客是想介绍Android camera从application layer到camera service layer整个框架中,能够使用的所有接口方式。
主要有哪几种interface?
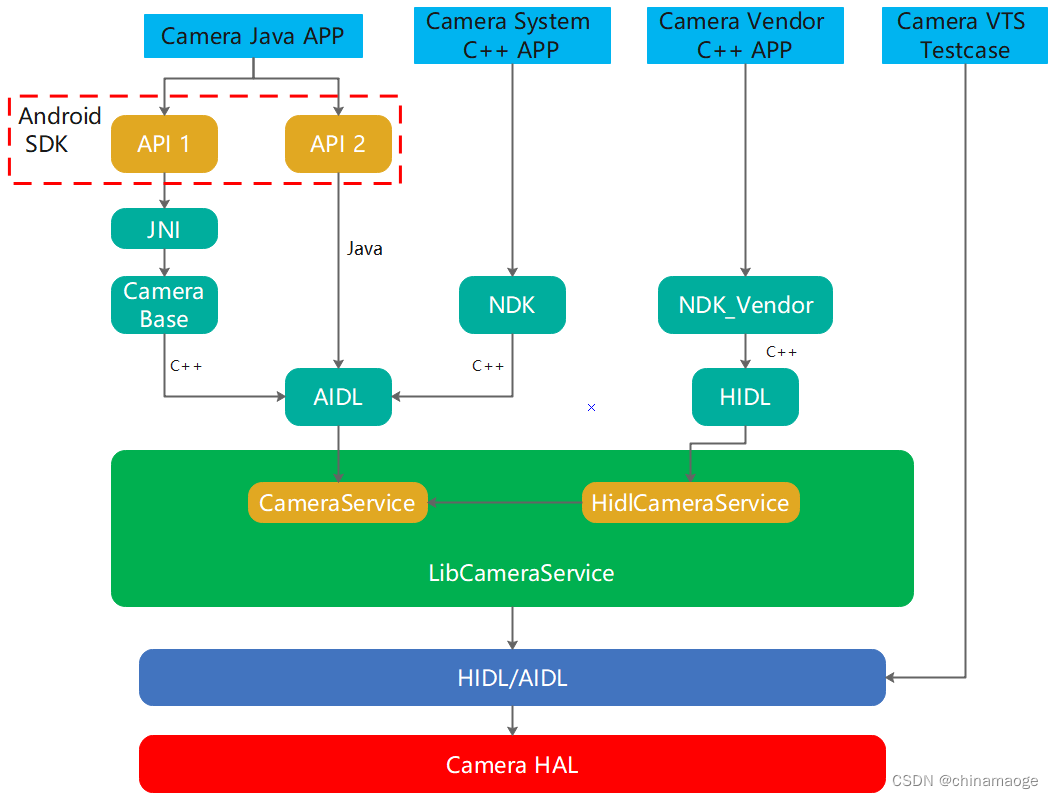
分为两大类:Android SDK,Android NDK。
Android NDK分为NDK和NDK vendor。对于camera module Android SDK可以分为camera API 1和camera API 2。最后有一种特殊的方式是用过HIDL interface来实现camera APP,给出总体架构图:
Android SDK
Camera API 1
- API 1作为最原始的一套camera API现在已经被Google启用,已经不在有功能上的升级,可以提供基础capture pictures and videos in your applications。API 1流程非常的特殊,他是通过JNI layer调用到libcameraservice,如果想了解JNI移步:链接: Camera Java Native Interface(JNI)介绍。
- 接下来通过camera open代码分析JNI调用过程
frameworks/base/core/java/android/hardware/Camera.java
public static Camera open() {
int numberOfCameras = getNumberOfCameras();
CameraInfo cameraInfo = new CameraInfo();
for (int i = 0; i < numberOfCameras; i++) {
getCameraInfo(i, cameraInfo);
if (cameraInfo.facing == CameraInfo.CAMERA_FACING_BACK) {
return new Camera(i);
}
}
return null;
}
如果在camera APP中调用API 1的open function去打开默认后置camera,一开始会新建一个camera device object,直接调用camera构造函数。
frameworks/base/core/java/android/hardware/Camera.java
Camera(int cameraId) {
if(cameraId >= getNumberOfCameras()){
throw new RuntimeException("Unknown camera ID");
}
int err = cameraInit(cameraId);
…
initAppOps();
}
在camera 构造函数中调用cameraInit。
frameworks/base/core/java/android/hardware/Camera.java
private int cameraInit(int cameraId) {
…
//调用到JNI中android_hardware_Camera_native_setup
return native_setup(new WeakReference<Camera>(this), cameraId,
ActivityThread.currentOpPackageName());
}
在camera Init中通过native_setup interface就会调用到JNI中android_hardware_Camera_native_setup function。
frameworks/base/core/jni/android_hardware_Camera.cpp
static jint android_hardware_Camera_native_setup(JNIEnv *env, jobject thiz,
jobject weak_this, jint cameraId, jstring clientPackageName)
{
const char16_t *rawClientName = reinterpret_cast<const char16_t*>(
env->GetStringChars(clientPackageName, NULL));
jsize rawClientNameLen = env->GetStringLength(clientPackageName);
String16 clientName(rawClientName, rawClientNameLen);
env->ReleaseStringChars(clientPackageName,
reinterpret_cast<const jchar*>(rawClientName));
int targetSdkVersion = android_get_application_target_sdk_version();
sp<Camera> camera = Camera::connect(cameraId, clientName, Camera::USE_CALLING_UID,
Camera::USE_CALLING_PID, targetSdkVersion);
…
sp<JNICameraContext> context = new JNICameraContext(env, weak_this, clazz, camera);
context->incStrong((void*)android_hardware_Camera_native_setup);
camera->setListener(context);
return NO_ERROR;
}
- android_hardware_Camera_native_setup 中connect是Camera C/S架构的客户端,调用connect函数向服务器发送连接请求。
- JNICameraContext这个类是一个监听类,用于处理底层Camera回调函数传来的数据和消息。
frameworks/av/camera/Camera.cpp
sp<Camera> Camera::connect(int cameraId, const String16& clientPackageName,
int clientUid, int clientPid, int targetSdkVersion)
{
return CameraBaseT::connect(cameraId, clientPackageName, clientUid,
clientPid, targetSdkVersion);
}
JNI调用进入C++ framework camera file connect function。
frameworks/av/camera/CameraBase.cpp
template <typename TCam, typename TCamTraits>
sp<TCam> CameraBase<TCam, TCamTraits>::connect(int cameraId,
const String16& clientPackageName,
int clientUid, int clientPid, int targetSdkVersion)
{
ALOGV("%s: connect", __FUNCTION__);
//创建一个camera对象,调用Camera和CameraBase构造函数
sp<TCam> c = new TCam(cameraId);
sp<TCamCallbacks> cl = c;
//获取camera service对象
const sp<::android::hardware::ICameraService> cs = getCameraService();
binder::Status ret;
if (cs != nullptr) {
TCamConnectService fnConnectService = TCamTraits::fnConnectService;
ret = (cs.get()->*fnConnectService)(cl, cameraId, clientPackageName, clientUid,
clientPid, targetSdkVersion, /*out*/ &c->mCamera);
}
…
return c;
}
CameraBase中通过获得到server端(camera service)代理对象ICameraService。
然后ICameraService通过fnConnectService链接camera service。
frameworks/av/camera/CameraBase.cpp
// establish binder interface to camera service
template <typename TCam, typename TCamTraits>
const sp<::android::hardware::ICameraService> CameraBase<TCam, TCamTraits>::getCameraService()
{
Mutex::Autolock _l(gLock);
if (gCameraService.get() == 0) {
if (CameraUtils::isCameraServiceDisabled()) {
return gCameraService;
}
//通过binder获取camera service
sp<IServiceManager> sm = defaultServiceManager();
sp<IBinder> binder;
do {
binder = sm->getService(String16(kCameraServiceName));
if (binder != 0) {
break;
}
ALOGW("CameraService not published, waiting...");
usleep(kCameraServicePollDelay);
} while(true);
if (gDeathNotifier == NULL) {
gDeathNotifier = new DeathNotifier();
}
binder->linkToDeath(gDeathNotifier);
gCameraService = interface_cast<::android::hardware::ICameraService>(binder);
}
ALOGE_IF(gCameraService == 0, "no CameraService!?");
return gCameraService;
}
getCameraService function中主要是展示通过binder的方法获取到camera service代理对象。
为什么fnConnectService可以链接camera device呢?因为fnConnectService就等于connect,如下代码:
frameworks/av/camera/Camera.cpp
CameraTraits<Camera>::TCamConnectService CameraTraits<Camera>::fnConnectService =
&::android::hardware::ICameraService::connect;
而connect本身定义为AIDL interface,就是通过binder实现跨进程调用到camera service,在camera service中进一步处理。
frameworks/av/camera/aidl/android/hardware/ICameraService.aidl
AIDL 文件中定义的connect interface,目的为跨进程调用
ICamera connect(ICameraClient client,
int cameraId,
String opPackageName,
int clientUid, int clientPid,
int targetSdkVersion);
到此camera API 1的流程就梳理完毕,JNI在其中做一个桥梁的作用,API 1通过JNI连接到C++ framework,也展示JNI的目的就是为让java field可以调用到C++ field。
Camera API 2
- 为更好的控制camera device,Google抛弃camera API 1重新设计camera API 2接口。
- Camera2 provides in-depth controls for complex use cases, but requires you to manage device-specific configurations。
- Camera API2 框架为应用提供更接近底层的相机控件,包括高效的零复制连拍/视频流以及曝光、增益、白平衡增益、颜色转换、去噪、锐化等方面的每帧控件。
- camera API 2调用流程相对简单,直接从API 2 interface通过AIDL调用到camera service,接下来也是举例openCamera流程进行分析。
frameworks/base/core/java/android/hardware/camera2/CameraManager.java
public void openCamera(@NonNull String cameraId,
@NonNull final CameraDevice.StateCallback callback, @Nullable Handler handler)
throws CameraAccessException {
openCameraForUid(cameraId, callback, CameraDeviceImpl.checkAndWrapHandler(handler),
USE_CALLING_UID);
}
public void openCameraForUid(@NonNull String cameraId,
@NonNull final CameraDevice.StateCallback callback, @NonNull Executor executor,
int clientUid, int oomScoreOffset) throws CameraAccessException {
…
openCameraDeviceUserAsync(cameraId, callback, executor, clientUid, oomScoreOffset);
}
APP通过API 2 open camera操作可以调用到camera manager中的openCamera function,进而调用到openCameraForUid、openCameraDeviceUserAsync。
frameworks/base/core/java/android/hardware/camera2/CameraManager.java
private CameraDevice openCameraDeviceUserAsync(String cameraId,
CameraDevice.StateCallback callback, Executor executor, final int uid,
final int oomScoreOffset) throws CameraAccessException {
CameraCharacteristics characteristics = getCameraCharacteristics(cameraId);
CameraDevice device = null;
Map<String, CameraCharacteristics> physicalIdsToChars =
getPhysicalIdToCharsMap(characteristics);
synchronized (mLock) {
ICameraDeviceUser cameraUser = null;
android.hardware.camera2.impl.CameraDeviceImpl deviceImpl =
new android.hardware.camera2.impl.CameraDeviceImpl(
cameraId,
callback,
executor,
characteristics,
physicalIdsToChars,
mContext.getApplicationInfo().targetSdkVersion,
mContext);
ICameraDeviceCallbacks callbacks = deviceImpl.getCallbacks();
try {
ICameraService cameraService = CameraManagerGlobal.get().getCameraService();
if (cameraService == null) {
throw new ServiceSpecificException(
ICameraService.ERROR_DISCONNECTED,
"Camera service is currently unavailable");
}
cameraUser = cameraService.connectDevice(callbacks, cameraId,
mContext.getOpPackageName(), mContext.getAttributionTag(), uid,
oomScoreOffset, mContext.getApplicationInfo().targetSdkVersion);
} catch (ServiceSpecificException e) {
…
}
return device;
}
openCameraDeviceUserAsync function中通过getCameraService获取到camera service代理ICameraService,这部分操作是在class CameraManagerGlobal中实现。
frameworks/base/core/java/android/hardware/camera2/CameraManager.java
class CameraManagerGlobal {
public ICameraService getCameraService() {
synchronized(mLock) {
connectCameraServiceLocked();
if (mCameraService == null && !sCameraServiceDisabled) {
Log.e(TAG, "Camera service is unavailable");
}
return mCameraService;
}
}
private void connectCameraServiceLocked() {
// Only reconnect if necessary
if (mCameraService != null || sCameraServiceDisabled) return;
Log.i(TAG, "Connecting to camera service");
IBinder cameraServiceBinder = ServiceManager.getService(CAMERA_SERVICE_BINDER_NAME);
if (cameraServiceBinder == null) {
// Camera service is now down, leave mCameraService as null
return;
}
try {
cameraServiceBinder.linkToDeath(this, /*flags*/ 0);
} catch (RemoteException e) {
// Camera service is now down, leave mCameraService as null
return;
}
//直接通过AIDL 获取camera service
ICameraService cameraService = ICameraService.Stub.asInterface(cameraServiceBinder);
…
}
}
- global manger camera class主要作为保持和camera service的链接,并且distribute camera device callback notice。
- getCameraService调用到connectCameraServiceLocked,可以很清楚的看到通过binder获取到cameraService。
- 因为connectDevice interface本身定义为AIDL,跨进程的方式从java framework调用到camera service中。
frameworks/av/camera/aidl/android/hardware/ICameraService.aidl
ICameraDeviceUser connectDevice(ICameraDeviceCallbacks callbacks,
String cameraId,
String opPackageName,
@nullable String featureId,
int clientUid, int oomScoreOffset,
int targetSdkVersion);
以上就讲解完通过 API 2方式从APP调用到camera service。
小结
- 虽然Android SDK中的API 1和API 2都是通过AIDL调用到camera service,但是分别是在C++ code和java code中调用,这里就体现AIDL这种接口描述性语言的优势,不需要考虑binder service和client两端的编程语言,只需要按照要求编写好AIDL interface,编译之后自动生成代码,在使用的时候按接口标准就可以实现。
Android NDK
NDK Interface
- NDK的全拼是:Native Develop Kit,Android NDK 是一套允许您使用原生代码语言(例如C和C++)实现部分应用的工具集。在开发某些类型应用时,这有助于您重复使用以这些语言编写的代码库。
- 我们来分析要是使用NDK的方式来编写camera APP进程的代码,open camera的流程是怎么样的。
frameworks/av/camera/ndk/NdkCameraManager.cpp
camera_status_t ACameraManager_openCamera(
ACameraManager* mgr, const char* cameraId,
ACameraDevice_StateCallbacks* callback,
/*out*/ACameraDevice** device) {
return mgr->openCamera(cameraId, callback, device);
}
在system分区中通过使用C++代码编写的camera APP,open camera调用的是NDK中的ACameraManager_openCamera,进一步进入camera manager openCamera function。
frameworks/av/camera/ndk/NdkCameraManager.cpp
camera_status_t
ACameraManager::openCamera(
const char* cameraId,
ACameraDevice_StateCallbacks* callback,
/*out*/ACameraDevice** outDevice)
{
sp<hardware::ICameraService> cs = CameraManagerGlobal::getInstance().getCameraService();
sp<hardware::camera2::ICameraDeviceCallbacks> callbacks = device->getServiceCallback();
sp<hardware::camera2::ICameraDeviceUser> deviceRemote;
int targetSdkVersion = android_get_application_target_sdk_version();
//调用CameraService::connectDevice
binder::Status serviceRet = cs->connectDevice(
callbacks, String16(cameraId), String16(""), {},
hardware::ICameraService::USE_CALLING_UID, /*oomScoreOffset*/0,
targetSdkVersion, /*out*/&deviceRemote);
...
}
openCamera function中先通过getCameraService获取到camera service代理对象(其中代码流程同上,就不分析了),再通过connectDevice AIDL interface 跨进程连接到camera service。
NDK Vendor Interface
- VNDK的全称是Vendor Native Development Kit,是Android 8.0引入的一种新技术。它表现一系列库的合集,用于让供应商开发自己的HALs。VNDK 包含在 system.img 中,并在运行时与供应商代码动态关联。
- 使用vndk的原因是自Android8.0以来,Google引入了Treble架构,希望对vendor和system分区进行解耦处理,期待实现:framwork进程不加载vendor共享库,vendor进程仅加载vendor共享库(和部分framework共享库),而framework进程和vendor进程之间通过HIDL和hwbinder来通信
- 这里也是通过open camera function,来分析在vendor分区中编写C++ 代码的camera APP 调用到camera service。
frameworks/av/camera/ndk/ndk_vendor/impl/ACameraManager.cpp
camera_status_t
ACameraManager::openCamera(
const char* cameraId,
ACameraDevice_StateCallbacks* callback,
/*out*/ACameraDevice** outDevice) {
sp<ACameraMetadata> rawChars;
camera_status_t ret = getCameraCharacteristics(cameraId, &rawChars);
Mutex::Autolock _l(mLock);
if (ret != ACAMERA_OK) {
ALOGE("%s: cannot get camera characteristics for camera %s. err %d",
__FUNCTION__, cameraId, ret);
return ACAMERA_ERROR_INVALID_PARAMETER;
}
ACameraDevice* device = new ACameraDevice(cameraId, callback, std::move(rawChars));
sp<ICameraService> cs = CameraManagerGlobal::getInstance().getCameraService();
if (cs == nullptr) {
ALOGE("%s: Cannot reach camera service!", __FUNCTION__);
delete device;
return ACAMERA_ERROR_CAMERA_DISCONNECTED;
}
sp<ICameraDeviceCallback> callbacks = device->getServiceCallback();
sp<ICameraDeviceUser_2_0> deviceRemote_2_0;
//通过调用HidlCameraService中connectDevice,hidl方式
Status status = Status::NO_ERROR;
auto serviceRet = cs->connectDevice(
callbacks, cameraId, [&status, &deviceRemote_2_0](auto s, auto &device) {
status = s;
deviceRemote_2_0 = device;
});
…
sp<ICameraDeviceUser> deviceRemote = castResult;
device->setRemoteDevice(deviceRemote);
device->setDeviceMetadataQueues();
*outDevice = device;
return ACAMERA_OK;
}
这里直接给出的是NDK Vendor中的openCamera function,但是这个函数也是被ACameraManager_openCamera调用。
其中mgr->openCamera是调用NDK还是NDK Vendor中的interface呢?需要通过mCameraManager来确定。
ACameraManager_openCamera(mCameraManager, mCameraId, &mDeviceCb, &mDevice);
mCameraManager = ACameraManager_create();
ACameraManager* ACameraManager_create() {
ATRACE_CALL();
return new ACameraManager();
}
- ACameraManager_openCamera调用时会传入mCameraManager,mCameraManager是由ACameraManager_create创建出来。ACameraManager_create 创建过程直接new ACameraManager对象。
NDK ACameraManager:
struct ACameraManager {
ACameraManager() :
mGlobalManager(&(android::acam::CameraManagerGlobal::getInstance())) {}
~ACameraManager();
camera_status_t getCameraIdList(ACameraIdList** cameraIdList);
static void deleteCameraIdList(ACameraIdList* cameraIdList);
camera_status_t getCameraCharacteristics(
const char* cameraId, android::sp<ACameraMetadata>* characteristics);
camera_status_t openCamera(const char* cameraId,
ACameraDevice_StateCallbacks* callback,
/*out*/ACameraDevice** device);
private:
enum {
kCameraIdListNotInit = -1
};
android::Mutex mLock;
android::sp<android::acam::CameraManagerGlobal> mGlobalManager;
};
NDK Vendor ACameraManager:
struct ACameraManager {
ACameraManager() :
mGlobalManager(&(android::acam::CameraManagerGlobal::getInstance())) {}
~ACameraManager();
camera_status_t getCameraIdList(ACameraIdList** cameraIdList);
static void deleteCameraIdList(ACameraIdList* cameraIdList);
camera_status_t getCameraCharacteristics(
const char* cameraId, android::sp<ACameraMetadata>* characteristics);
camera_status_t openCamera(const char* cameraId,
ACameraDevice_StateCallbacks* callback,
/*out*/ACameraDevice** device);
camera_status_t getTagFromName(const char *cameraId, const char *name, uint32_t *tag);
private:
enum {
kCameraIdListNotInit = -1
};
android::Mutex mLock;
android::sp<android::acam::CameraManagerGlobal> mGlobalManager;
};
- new ACameraManager需要区分是调用NDK还是NDK Vendor创建对象,不同的对象进而实现不同的调用接口逻辑。
- 再回来看openCamera function中的connectDevice interface,其中传递的参数和NDK代码中明显不同,因为NDK Vendor调用的是HIDL 定义connectDevice interface。
frameworks/hardware/interfaces/cameraservice/service/2.0/ICameraService.hal
connectDevice(ICameraDeviceCallback callback, string cameraId)
generates (Status status, ICameraDeviceUser device);
- ICameraService.hal文件中定义的HIDL connectDevice interface。
- cs->connectDevice通过binder跨进程可以调用到HidlCameraService::connectDevice中。
小结
- 以上分析了通过NDK和NDK Vendor方式,connect device连接到camera service的代码流程,区别在于NDK使用AIDL interface而NDK Vendor使用 HIDL interface,并且在libcameraservice中对接的接口也不一样。
- System分区中new ACameraManager实例调用NDK interface,Vendor 分区中new ACameraManager实例调用NDK Vendor interface。
- HidlCameraService对上连接NDK Vendor,但是最终实现功能还是依赖于CameraService。
Camera VTS Testcase
- HIDL interface提供的接口是可以直接实现camera device所有基础的功能,但是由于没有 camera service的介入对于管理camera device是非常困难的。使用这种方式构建camera APP非常的特殊,没有经过整个Android framework,可以直接对HAL进行测试。
- Camera VTS testcase 是基于HDIL interface来实现功能的测试程序,毕竟是Google提供给HAL 厂商稳定的接口,肯定需要测试保证其稳定性。
- 对于如果是camera service process没有启动的情况下,可以使用HDIL interface来写camera APP,感兴趣可以移步: Camera HIDL接口实现camera preview功能
总结
- 这篇博客主要是对Android framework接口方式进行介绍,其中包括Android SDK和Android NDK,Android SDK可以分为API 1和API 2,其中API 1通过JNI的方式调用实现。
- JNI调用的cameraBase是和NDK、NDK vendor处于同一目录下,framework中的audio和video服务层(av目录名字含义)。
- CameraBase、API 2和NDK都是通过AIDL跨进程调用到libcameraservice,而只有NDK Vendor独特的使用HIDL跨进程调用到libcameraservice。
Reference
链接: Android JNI(一)——NDK与JNI基础