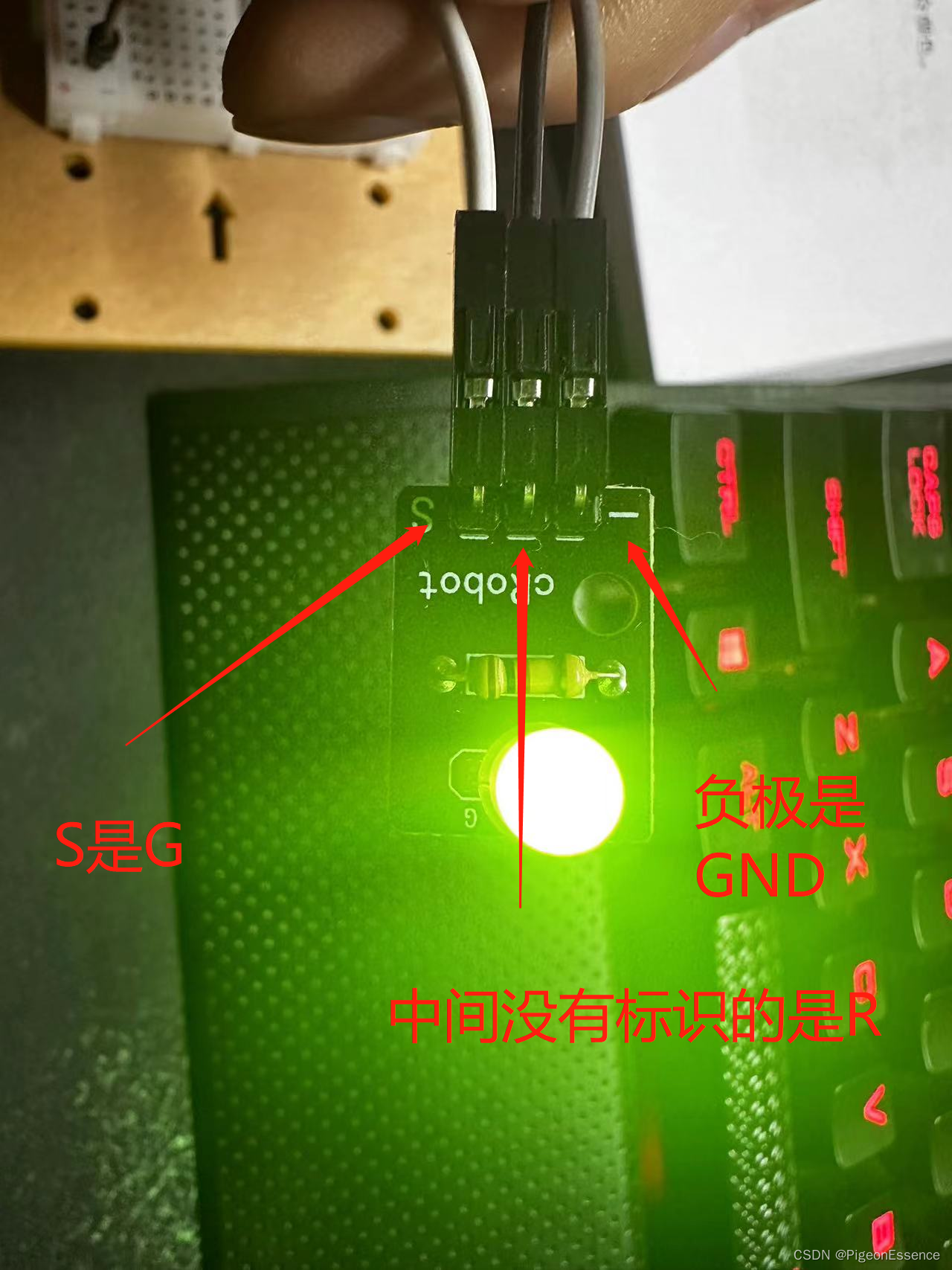
接线图片:

双色LED实物和布线有区别:
代码:
int RED_LED = 11; //设置红色为11
int GREEN_LED = 10; //设置绿色为10
int val = 0;//全局变量val
void setup() {
// put your setup code here, to run once:
pinMode(RED_LED,OUTPUT);//引脚配置
pinMode(GREEN_LED,OUTPUT);
Serial.begin(9600);
}
void loop() {
// put your main code here, to run repeatedly:
for(val=255; val>0; val--){
analogWrite(RED_LED,val);
analogWrite(GREEN_LED,255-val);
delay(30);
}
for(val=0; val<255; val++){
analogWrite(RED_LED,val);
analogWrite(GREEN_LED,255-val);
delay(30);
}
}代码函数:
1.pinMode()
通过pinMode()函数,你可以将Arduino的引脚配置为以下三种模式:
输出(OUTPUT)模式
输入(INPUT)模式
输入上拉(INPUT_PULLUP)模式 (仅支持Arduino 1.0.1以后版本)
在输入上拉(INPUT_PULLUP)模式中,Arduino将开启引脚的内部上拉电阻,实现上拉输入功能。一旦将引脚设置为输入(INPUT)模式,Arduino内部上拉电阻将被禁用。
当引脚设置为输出(OUTPUT)模式时,引脚为低阻抗状态。这意味着Arduino可以向其它电路元器件提供电流。也就是说,Arduino引脚在输出(OUTPUT)模式下可以点亮LED或者驱动电机。(如果被驱动的电机需要超过40mA的电流,Arduino将需要三极管或其它辅助元件来驱动他们。)
当引脚设置为输入(INPUT)模式时,引脚为高阻抗状态(100兆欧)。此时该引脚可用于读取传感器信号或开关信号。
注意:当Arduino引脚设置为输入(INPUT)模式或者输入上拉(INPUT_PULLUP)模式,请勿将该引脚与负压或者高于5V的电压相连,否则可能会损坏Arduino控制器。
设置引脚为输入上拉(INPUT_PULLUP)模式Arduino 微控制器自带内部上拉电阻。如果你需要使用该内部上拉电阻,可以通过pinMode()将引脚设置为输入上拉(INPUT_PULLUP)模式。
注意:当Arduino引脚设置为输入(INPUT)模式或者输入上拉(INPUT_PULLUP)模式,请勿将该引脚与负压或者高于5V的电压相连,否则可能会损坏Arduino控制器。
2.Serial
Arduino需要和其他设备相互通讯,而最常见最简单的方式就是串口通讯(Serial)。
在PC机上最常见的串行通讯协议是RS-232串行协议,而各种微控制器(单片机)上采用的是TTL串行协议,两者电平不同,需要经过相应电平转换才能进行相互通讯。
Serial.begin()描述:开启串口,通常置于setup()函数中。原型:Serial.begin(speed)Serial.begin(speed, config)参数:speed:波特率,一般取值9600,115200等。config:设置数据位、校验位和停止位。默认SERIAL_8N1表示8个数据位,无校验位,1个停止位。返回值:无。
Serial.end() 描述:禁止串口传输。此时串口Rx和Tx可以作为数字IO引脚使用。 原型:Serial.end() 参数:无。 返回值:无。
Serial.print()描述:串口输出数据,写入字符数据到串口。原型:Serial.print(val)Serial.print(val, format)参数:val:打印的值,任意数据类型。config:输出的数据格式。BIN(二进制)、OCT(八进制)、DEC(十进制)、HEX(十六进制)。对于浮点数,此参数指定要使用的小数位数。返回值:返回写入的字节数。
Serial.available()描述:判断串口缓冲区的状态,返回从串口缓冲区读取的字节数。原型:Serial.available()参数:无。返回值:可读取的字节数。
Serial.read()描述:读取串口数据,一次读一个字符,读完后删除已读数据。原型:Serial.read()参数:无。返回值:返回串口缓存中第一个可读字节,当没有可读数据时返回-1,整数类型。
Serial.readBytes()描述:从串口读取指定长度的字符到缓存数组。原型:Serial.readBytes(buffer, length)参数:buffer:缓存变量。length:设定的读取长度。返回值:返回存入缓存的字符数。
3.analogWrite()
将模拟值(PWM波)输出到管脚。可用于在不同的光线亮度调节发光二极管亮度或以不同的速度驱动马达。调用analogWrite()后,该引脚将产生一个指定占空比的稳定方波,直到下一次调用analogWrite()(或在同一引脚调用digitalRead()或digitalWrite())。 PWM的信号频率约为490赫兹。
analogWrite()描述:将模拟值(PWM波)输出到管脚。原型:analogWrite(pin, value)
参数:
pin:输出的引脚号
value:占用空:从0(常关)到255(常开)返回值:无。
引脚5和6的PWM输出将产生高于预期的占空比。这是因为millis()和delay()函数,它们共享同一个内部定时器用于产生PWM输出所产生的相互作用。这提醒我们引脚5和6在多数低占空比的设置(如0- 10)的情况下0数值的结果并没有完全关闭。
4.delay()
delay()函数的工作方式非常简单。它接受单个整数(或数字)参数。此数字表示时间(以毫秒为单位)。当程序遇到这个函数时,应该等到下一行代码。然而,问题是,delay()函数并不是让程序等待的好方法,因为它被称为阻塞(blocking)函数。
原型:delay (ms) ;(其中, ms 是以毫秒为单位暂停的时间(无符号长整型)。)