获取灵巧手抓取物体时的抓持类型,需要考虑:手本身的结构、被抓取物体的形状尺寸、抓持操作任务的条件。
研究方法:基于模型的方法、基于数据驱动的方法
基于模型的方法:建立灵巧手抓持相关的运动学和动力学模型+建立目标函数+求解最优抓取类型——缺:求解多个优化函数,运算复杂,计算量大
基于数据驱动的方法:利用经验信息和传感信息对数据进行分析,求解得到抓持类型——特点:更关心物体的表达和识别感知过程
灵巧手抓持分类
Schlesinger和Taylor将抓持类型定义为6种,分别为圆柱抓握(Cylindrical)、钩形抓握(Hook)、指尖抓握(Fingertip)、球形抓握((Spherical)、掌心抓握(Palwar)及侧边抓取(Laternal)。
Napier 综合考虑抓持的稳定性、灵活性以及人手与物体的接触面积等,将人手常用的抓持方式分为强力抓持(Power)和精细抓持(Precision) ,又根据人手抓持物体时是否对物体形成包络将强力抓持分为缠绕式抓持和非缠绕式抓持。
Cutkosky研究人手的各种抓持方式,将抓持类型细化为16种。
Stanford/JPL灵巧手设定了包络 ( Wrap)、抓握(Grip)和捏取(Pinch)三个基本抓持方式。
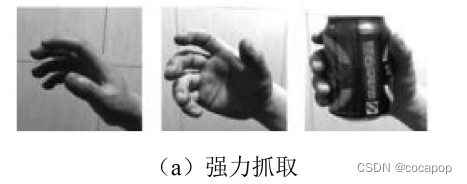
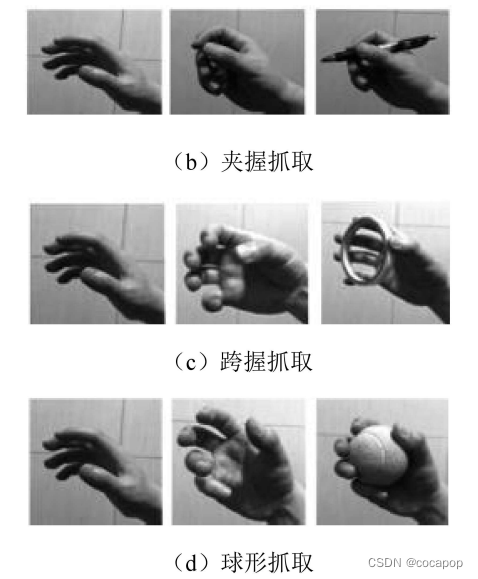
Sollerman等人根据日常生活中人手抓持物体的使用习惯分成8种抓持动作,并使用统计学的方法得出这8种抓持动作在生活中使用频率达到88%,基本上可以满足人们日常生活中对于物体抓持的动作需求。
包括:强力抓取、夹握~、跨握~、球形~、侧捏~、掌心~、钩形~、精密~
因此,本文采用Sollermat等人定义的抓持动作作为灵巧手的八种抓持类型。
灵巧手抓持仿真
机器人灵巧手抓持仿真平台=视觉传感器(获取图像信息)+操作控制界面(控制视觉传感器对被抓物体图像进行采集和显示)+虚拟灵巧手(人工模式下抓持类型的选取)
仿真环境和灵巧手模型
本文需要:
(1)机器宇航员2号(Robonaut 2)灵巧手 = 5个手指共12个自由度
(2)安装相关功能包(使用mkdir命令创建一个r2工作空间,并从 bitbucket源代码托管网站上下载并安装Robonaut 2模型和Robonaut 2控制器,进入工作空间并编译。)
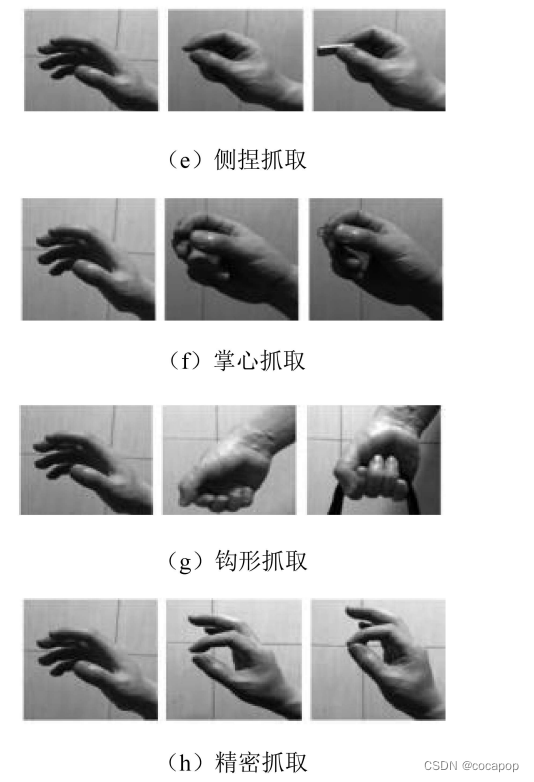
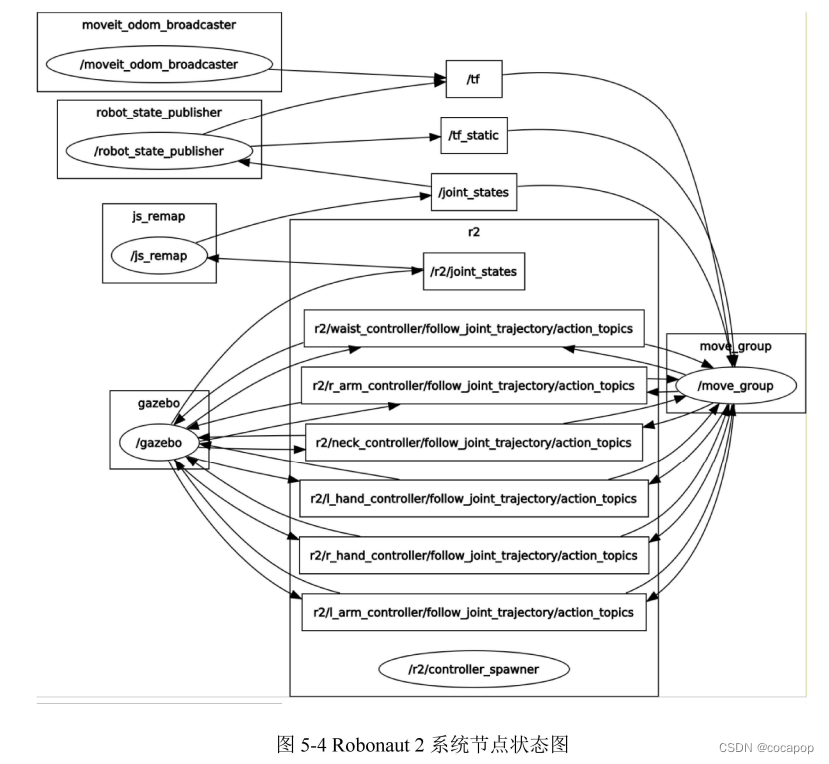
(3)Gazabo载入Robonaut 2,并在gazebo中创建一个gazebo_ros_control功能包,用于实现Gazebo和Movelt之间的双向通信。其中,功能包中提供了gazebo_ros_control控制器插件模块。启动Robonaut2机器人Movelt主程序。此时,在终端输入rqt_graph 显示节点状态图如下:
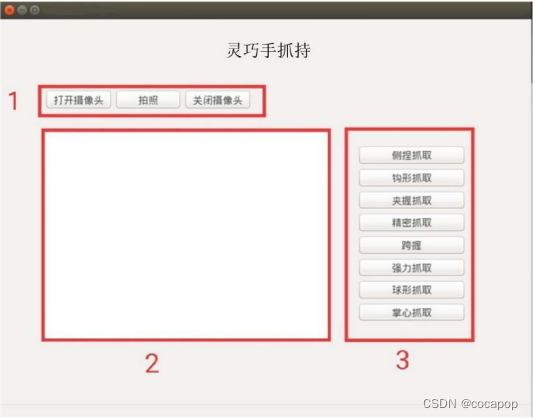
操作控制界面
PyQt5:设计创建机器人灵巧手操作控制系统的GUI界面。|
控制界面的作用:(1)对视觉传感器采集的被抓持物体图像信息进行在线显示;(2)实现通过界面按钮等控制灵巧手仿真模型的关节运动。