看门狗介绍
在由单片机构成的微型计算机系统中,由于单片机的工作常常会受到来自外界电磁场的干扰,造成程序的跑飞,而陷入死循环,程序的正常运行被打断,由单片机控制的系统无法继续工作,会造成整个系统的陷入停滞状态,发生不可预料的后果,所以出于对单片机运行状态进行实时监测的考虑,便产生了一种专门用于监测单片机程序运行状态的模块或者芯片俗称“看门狗“(watchdog)。
有一个程序员叫张三,老板养了一条狗用来监督张三持续工作,张三需要定时喂养这条狗以确保老板知道自己一直在努力工作,如果有一次没有喂养这条狗,那么狗就会反骨咬死张三,张三就会重新升天投胎为程序员继续工作,同时老板还是派这条狗来监督张三的工作,张三同样也需要定时喂养他,往复持续。
独立看门狗(IWDG)
独立看门狗工作在主程序之外,能够完全独立工作,它的时钟是专用的低速时钟(LSI),由VDD电压供电,在停止模式和待机模式下仍能工作。
独立看门狗的本质
独立看门狗是一个12位的递减计数器,当计数器的值从某个值一直减到0的时候,系统就会产生-个复位信号,即IWDG_RESET。
如果在计数没减到0之前,刷新了计数器的值的话,那么就不会产生复位信号,这个动作就是我们经常说的喂狗。
独立看门狗的时钟
独立看门狗的时钟由独立的RC振荡器LSI提供,即使主时钟发生故障它仍然有效,非常独立。启用IWDG后,LSI时钟会自动开启。MCU内部的RC频率会在30kHz到60kHz之间变化,因此 LSI时钟频率并不精确,一般设定为40kHz。
LSI经过一个8位的预分频器得到计数器时钟。
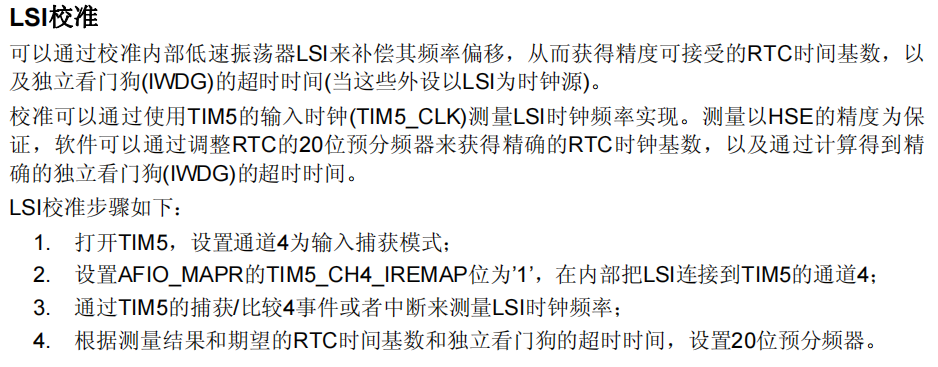
想要获得独立看门狗相对精准的超时时间可以对LSI进行校准
独立看门狗框图
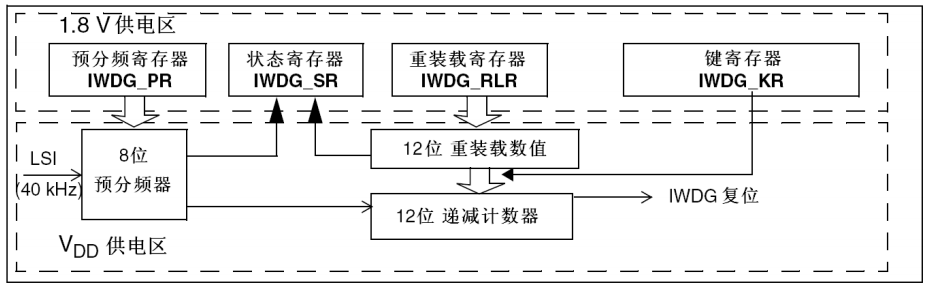
键寄存器(IWDG_KR)
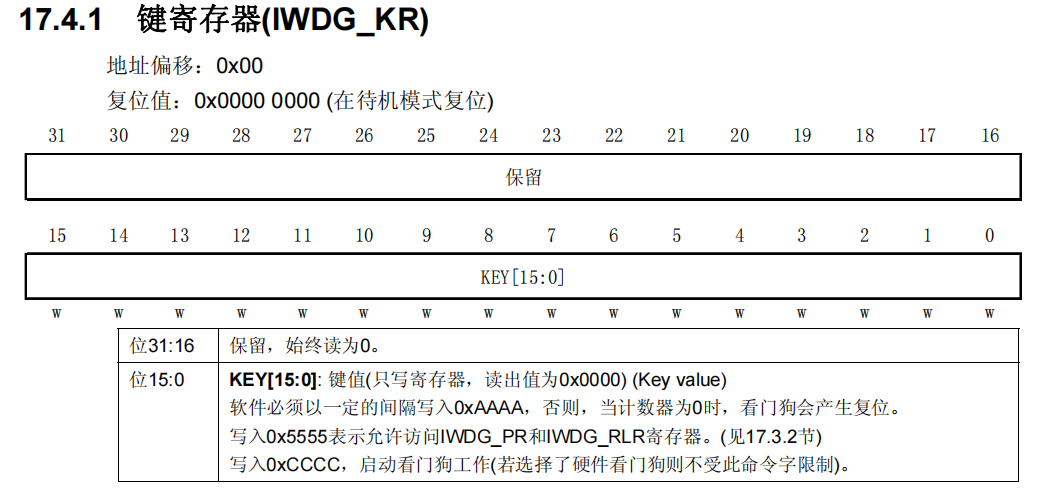
独立看门狗的控制寄存器,主要有三种控制方式。
预分频寄存器(IWDG_PR)
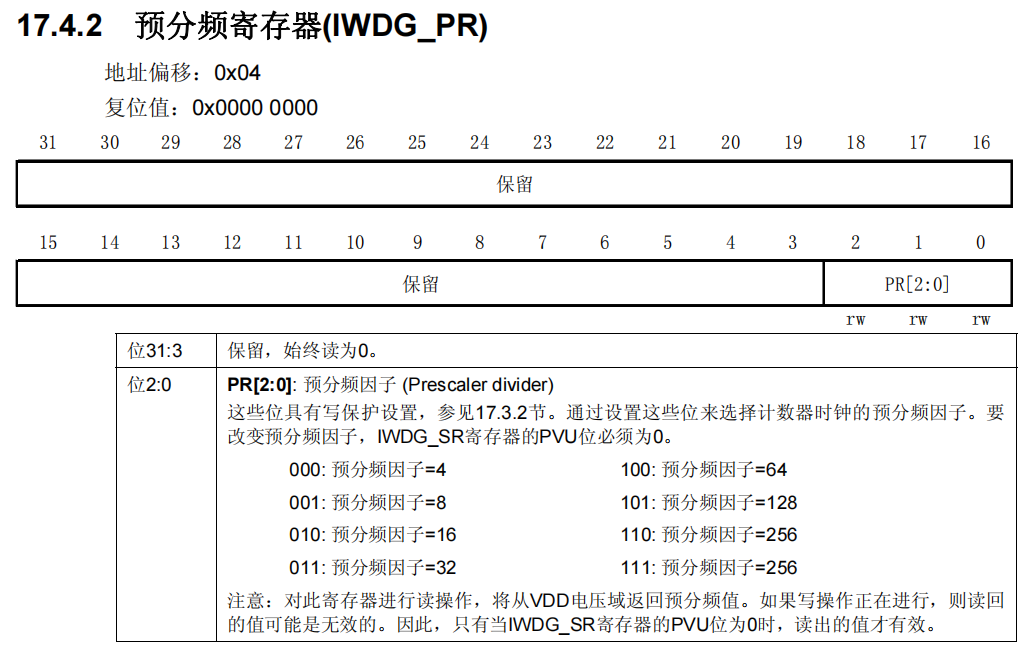
分频系数算法:PSC = 4 * 2^prer
prer是IWDG_PR的值,即当IWDG_PR为010时,即prer为2
重装载寄存器(IWDG_RLR)
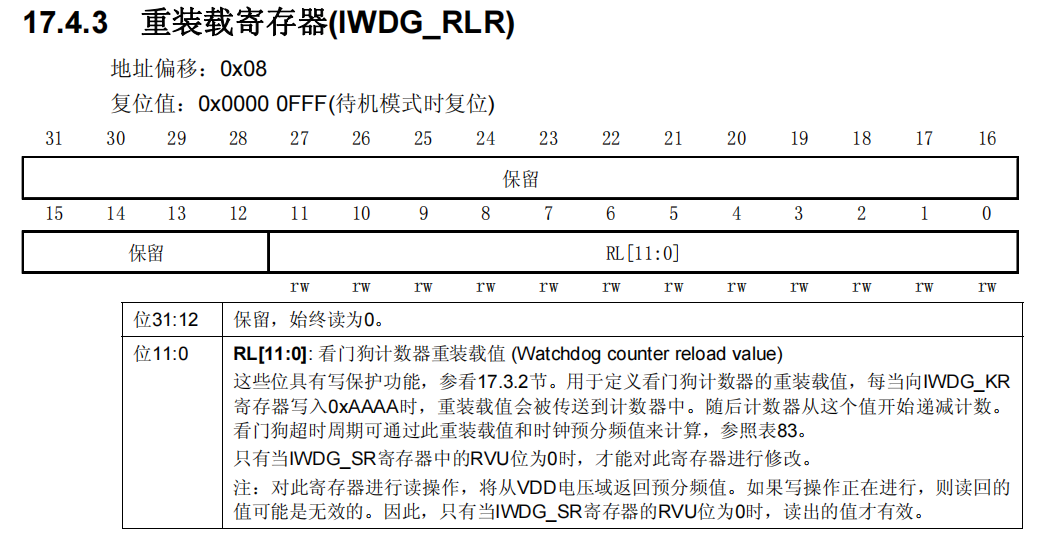
用于存放重装载值,最大值为4096,该寄存器的值的大小决定了独立看门狗的溢出时间
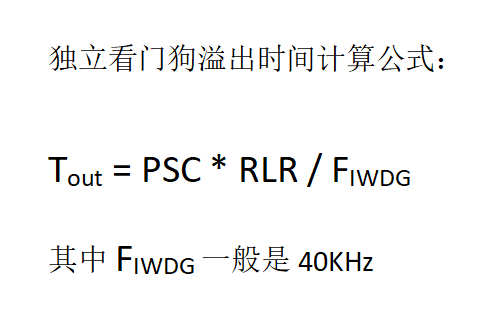
独立看门狗的溢出时间与PSC和RLR的值有关,溢出时间计算公式如下
独立看门狗实验
开启独立看门狗,溢出时间为一秒,使用按键进行喂狗,不喂狗时反复执行main函数,导致LED1闪烁,喂狗时只执行一次main函数,LED1常亮。
独立看门狗喂狗函数HAL_IWDG_Refresh()
原型:HAL_StatusTypeDef HAL_IWDG_Refresh(IWDG_HandleTypeDef *hiwdg)
参数:
IWDG_HandleTypeDef *hiwdg:独立看门狗句柄
实例:HAL_IWDG_Refresh(&hiwdg);
使用STM32CubeMX创建工程
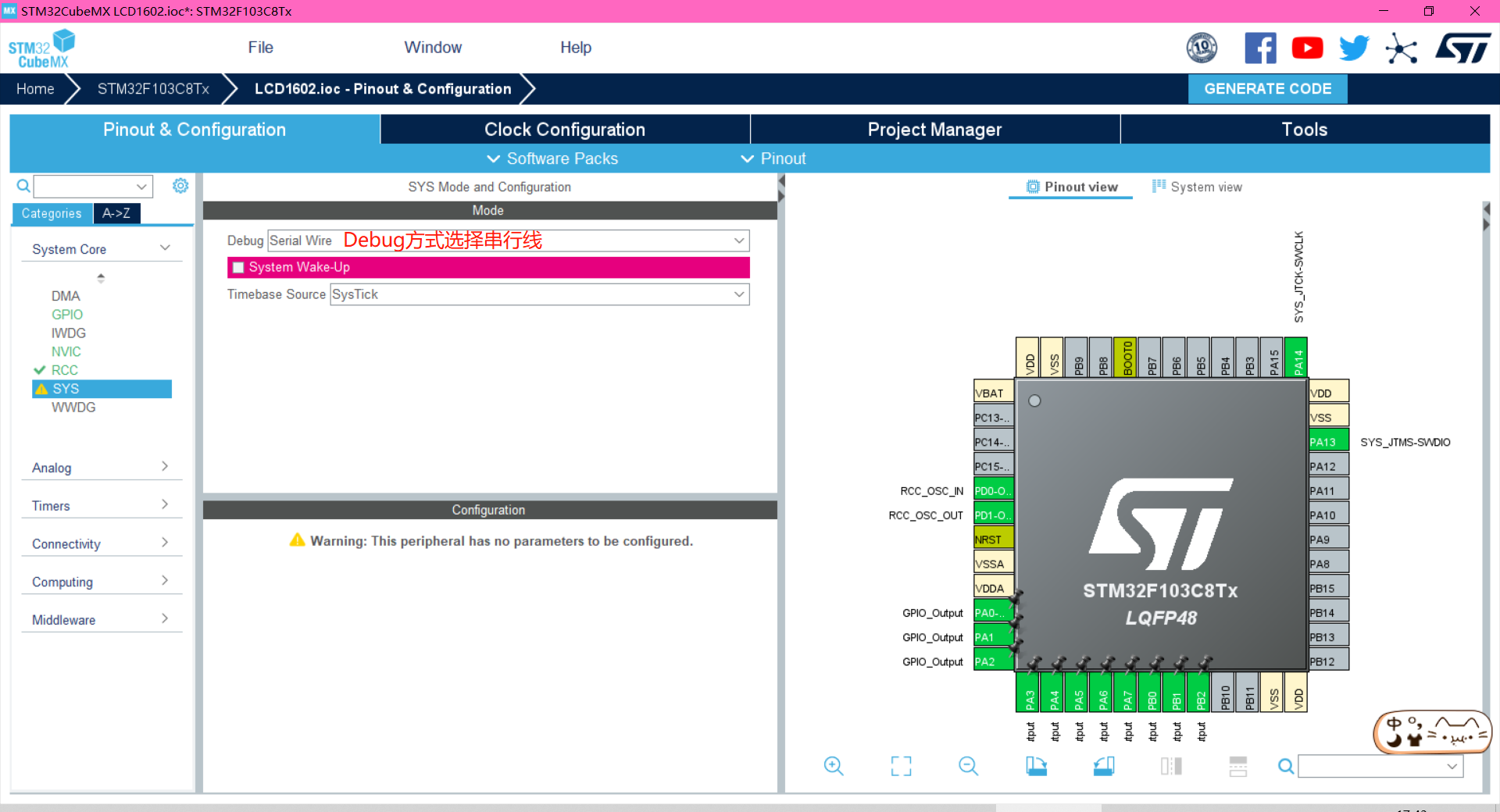
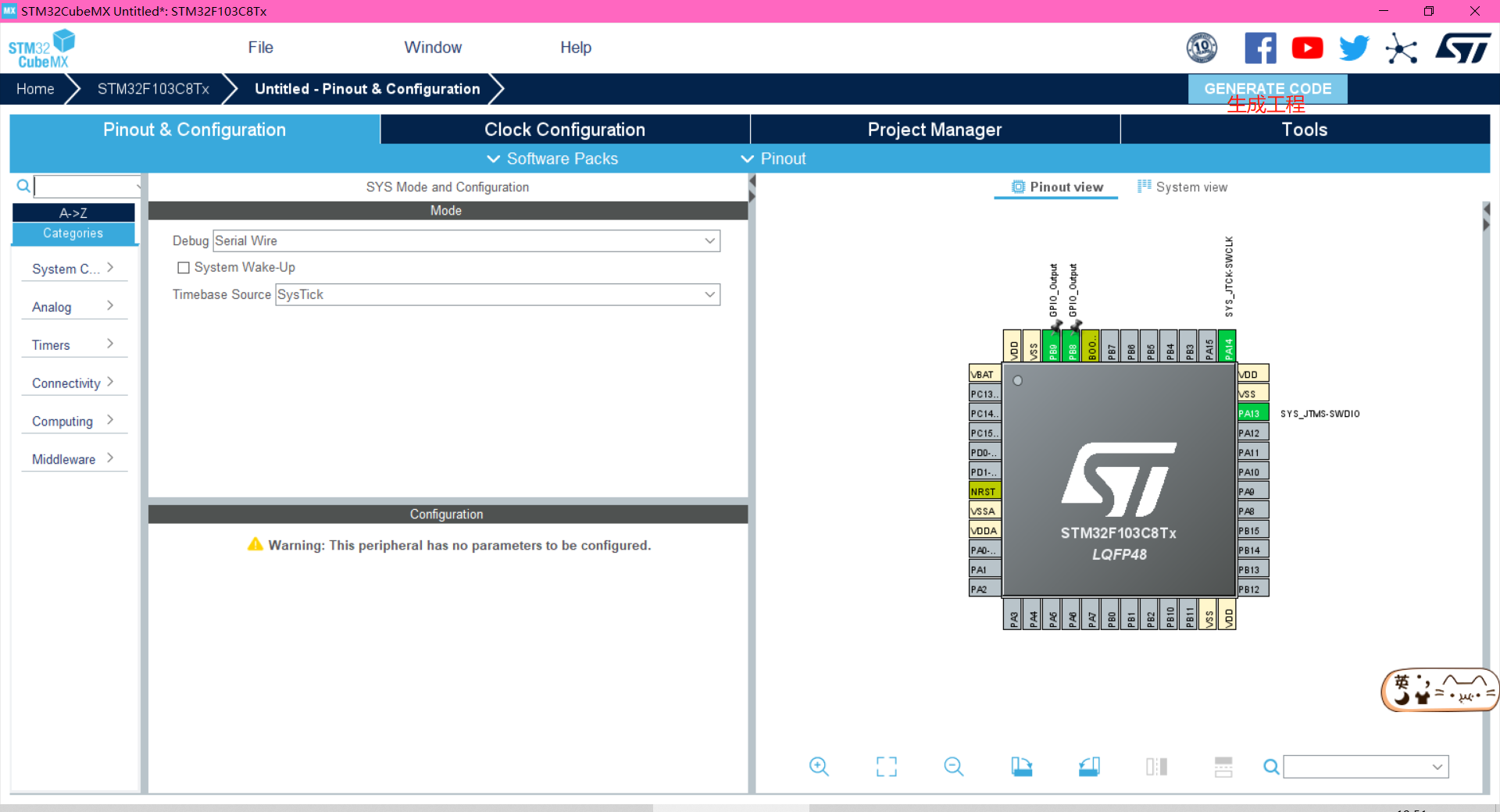
配置SYS
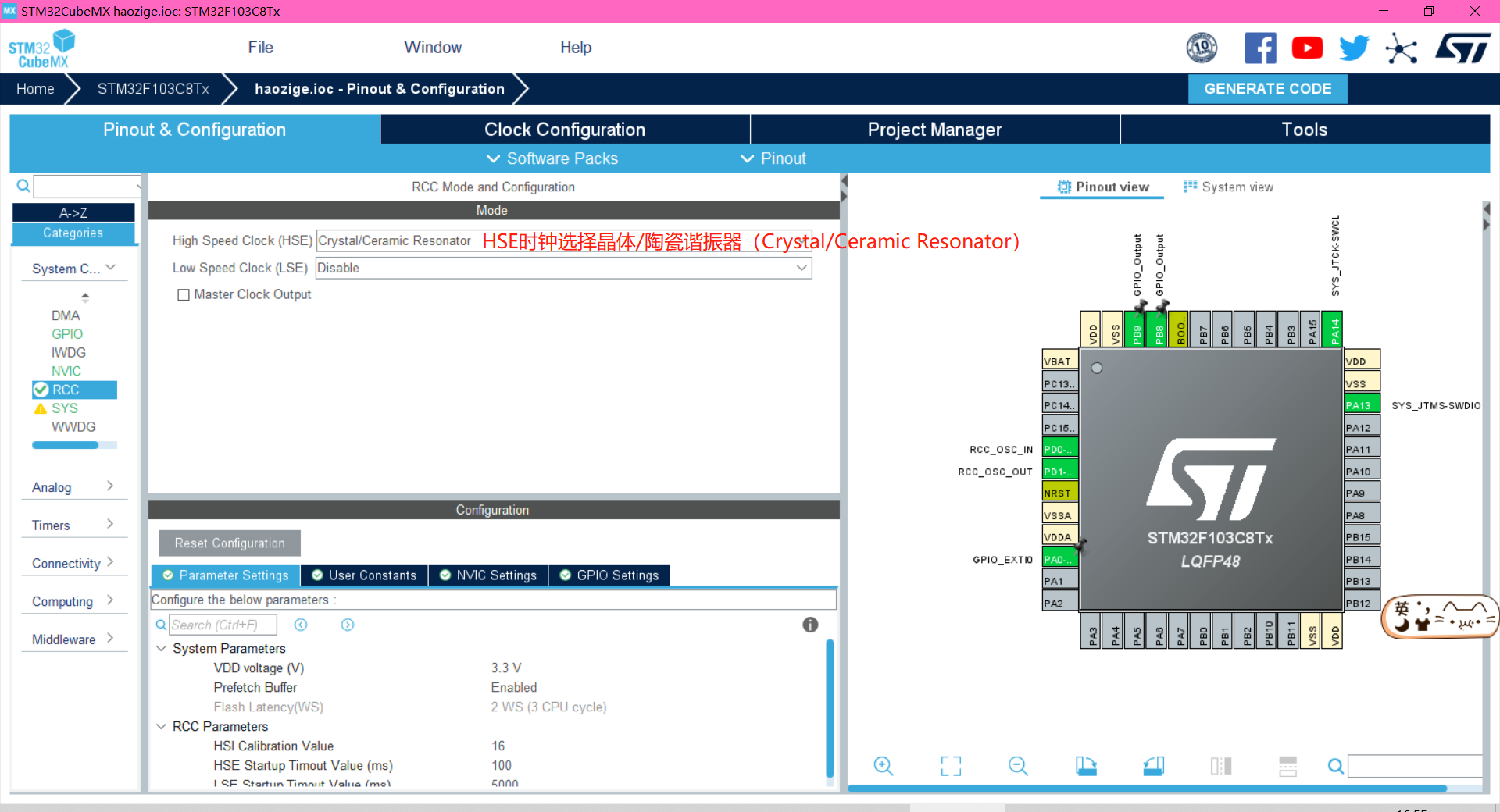
配置RCC
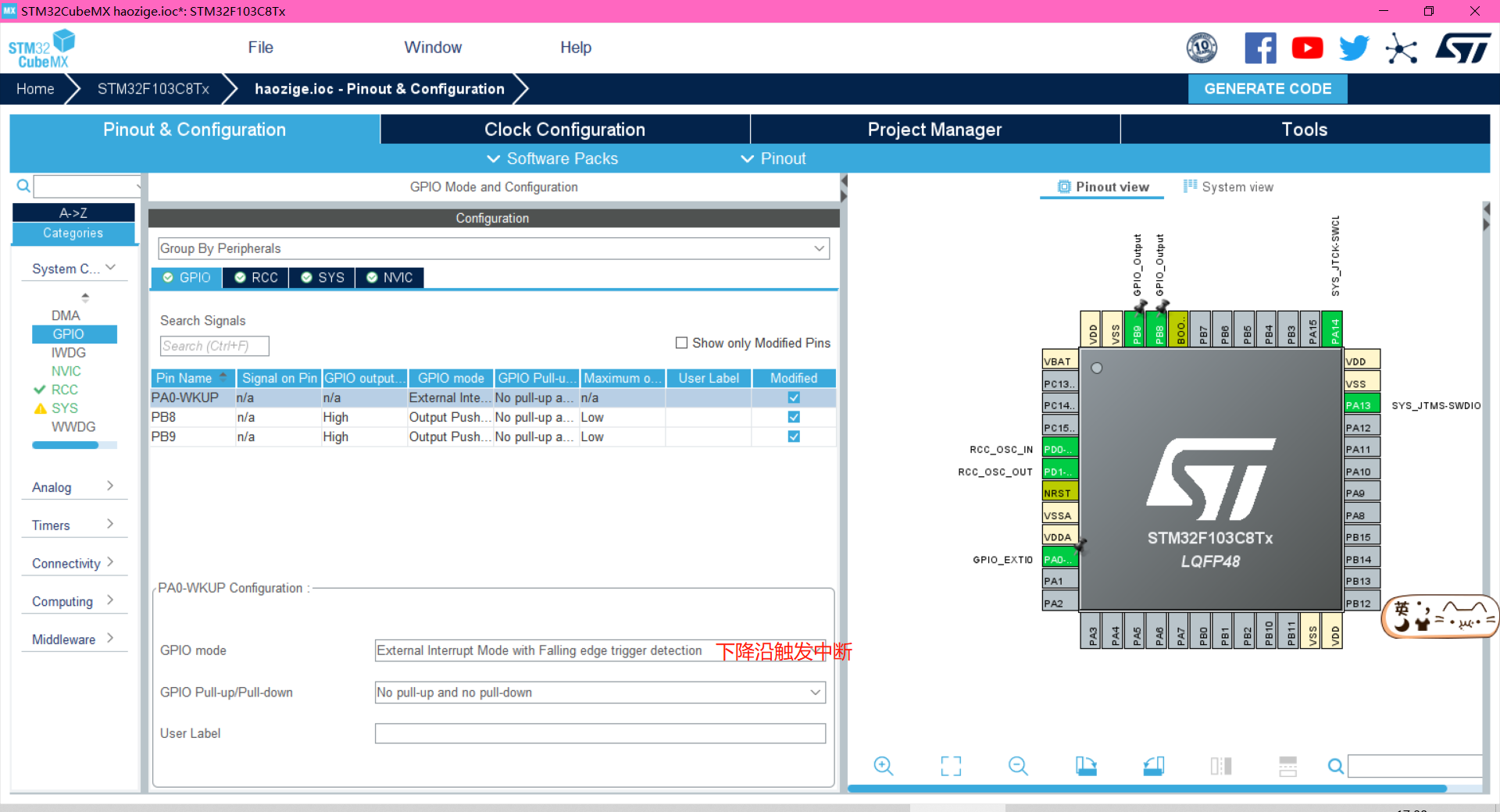
配置GPIO
PB9都配置为输出高电平,PA0配置为下降沿触发中断
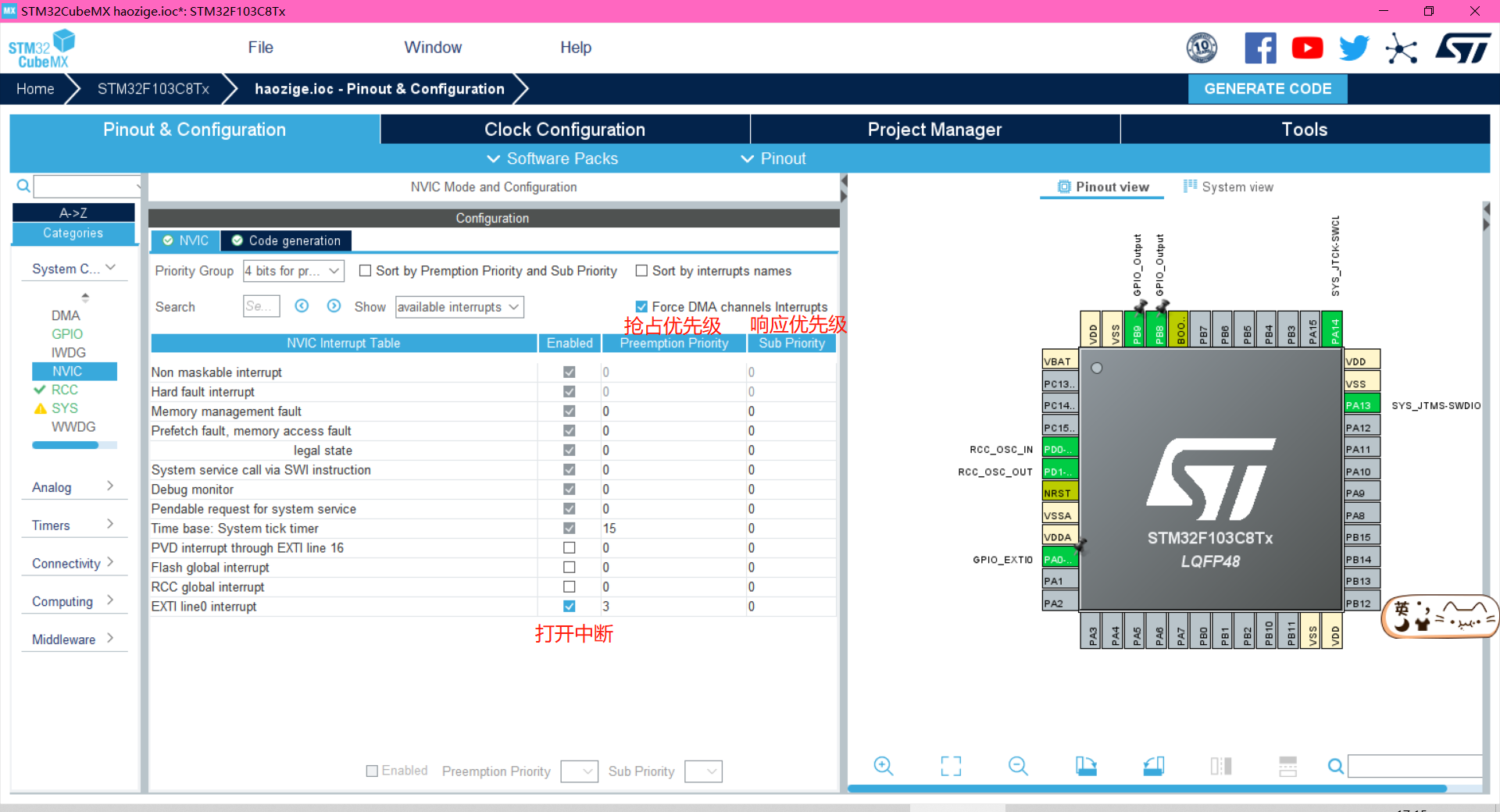
配置NVIC
将PA0的中断的抢占优先级配置为3,因为待会要在中断处理函数中调用HAL_Delay(),而该函数要用到滴答定时器,而在程序初始化时默认将滴答定时器的中断优先级设置为最低,因此其他中断源很容易将其打断。
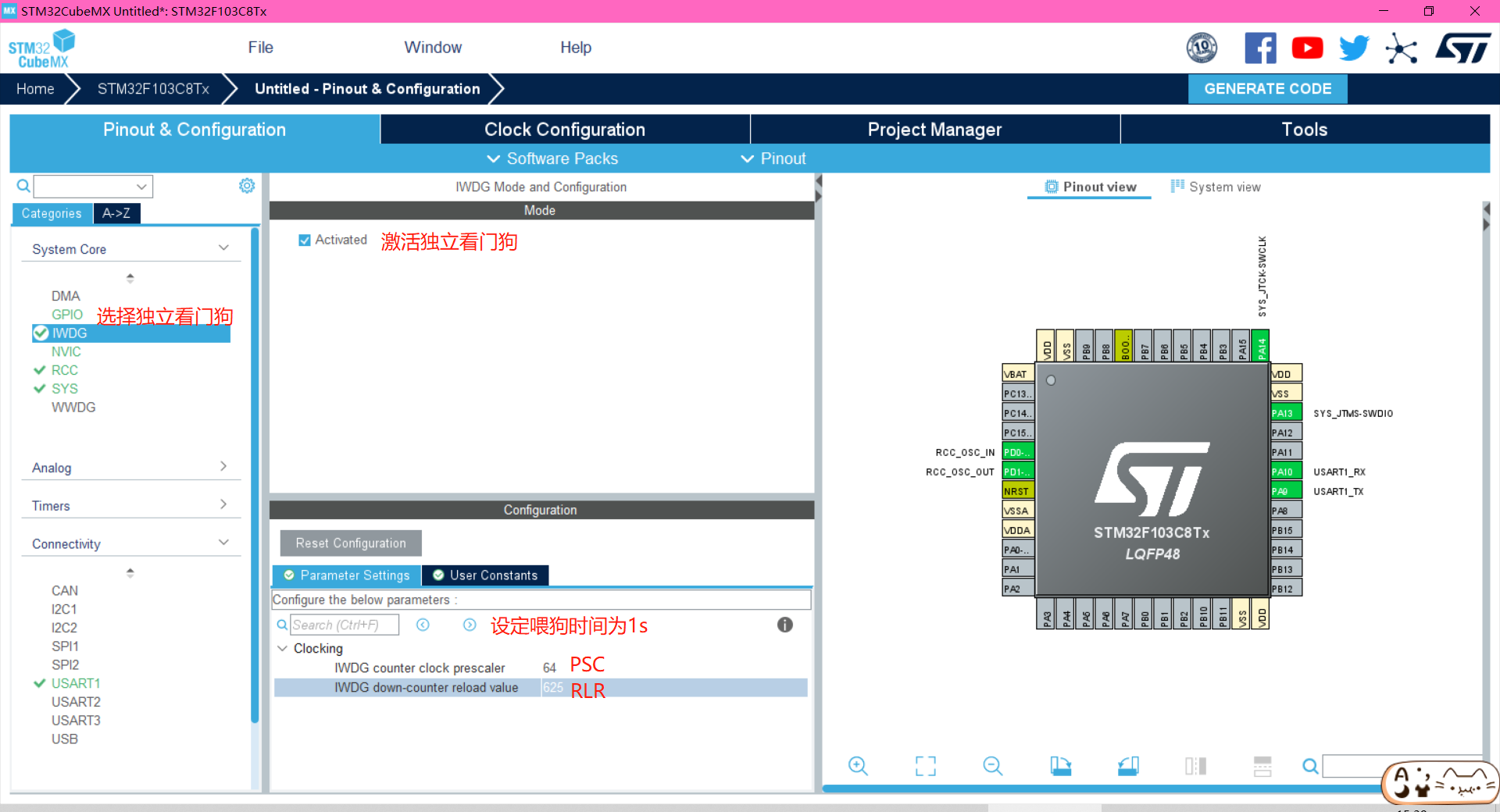
配置IWDG
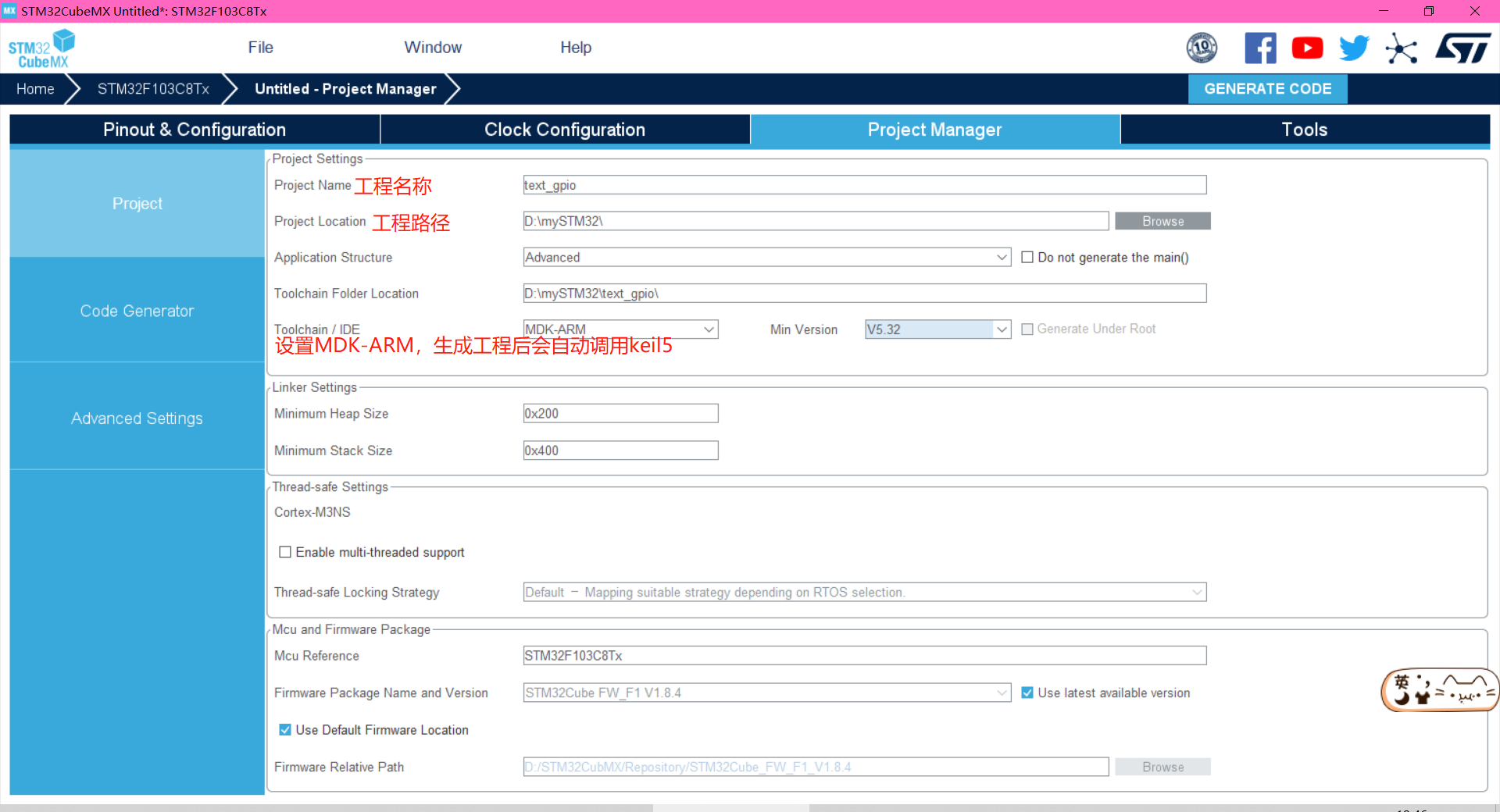
配置工程名称、工程路径
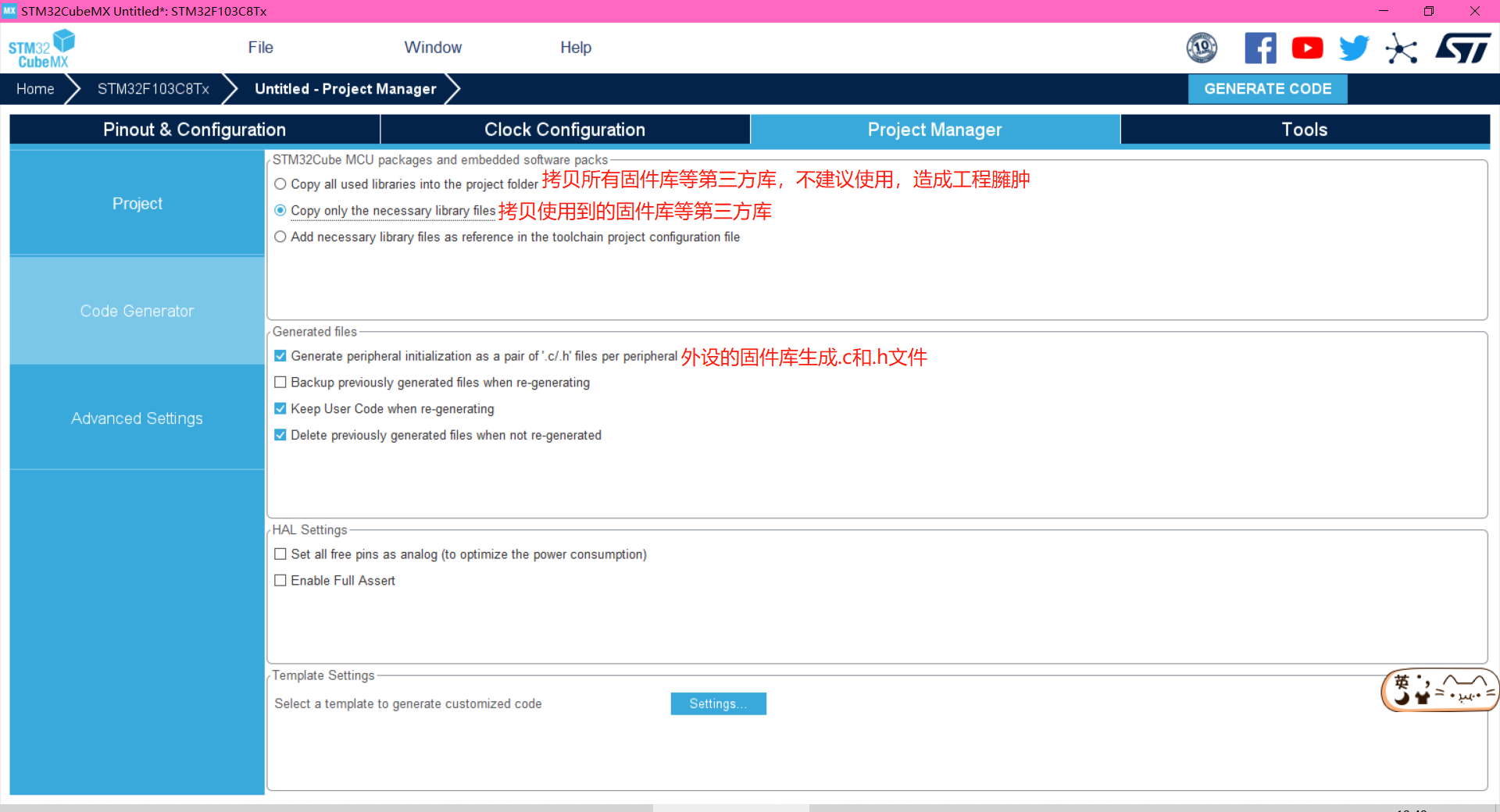
选择固件库
生成工程
main函数编写
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2023 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "iwdg.h"
#include "gpio.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
void HAL_GPIO_EXTI_Callback(uint16_t GPIO_Pin)
{
//按键PA0触发的中断
if(GPIO_Pin == GPIO_PIN_0){
HAL_Delay(50);
if(HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_0) == GPIO_PIN_RESET){
HAL_IWDG_Refresh(&hiwdg);//喂狗
}
}
}
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_IWDG_Init();
/* USER CODE BEGIN 2 */
HAL_NVIC_SetPriority(SysTick_IRQn,0,0); //把滴答定时器的抢占优先级和响应优先级都设置为最高
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_9,GPIO_PIN_RESET);
HAL_Delay(500);
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_9,GPIO_PIN_SET);
HAL_Delay(500);
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
//如果没喂狗的话,就不会执行该循环,即灯不会常亮
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_9,GPIO_PIN_RESET);
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_LSI|RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.LSIState = RCC_LSI_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
窗口看门狗
窗口看门狗用于监测单片机程序运行时效是否精准,主要检测软件异常,一般用于需要精准检测程序运行时间的场合。
窗口看门狗的本质
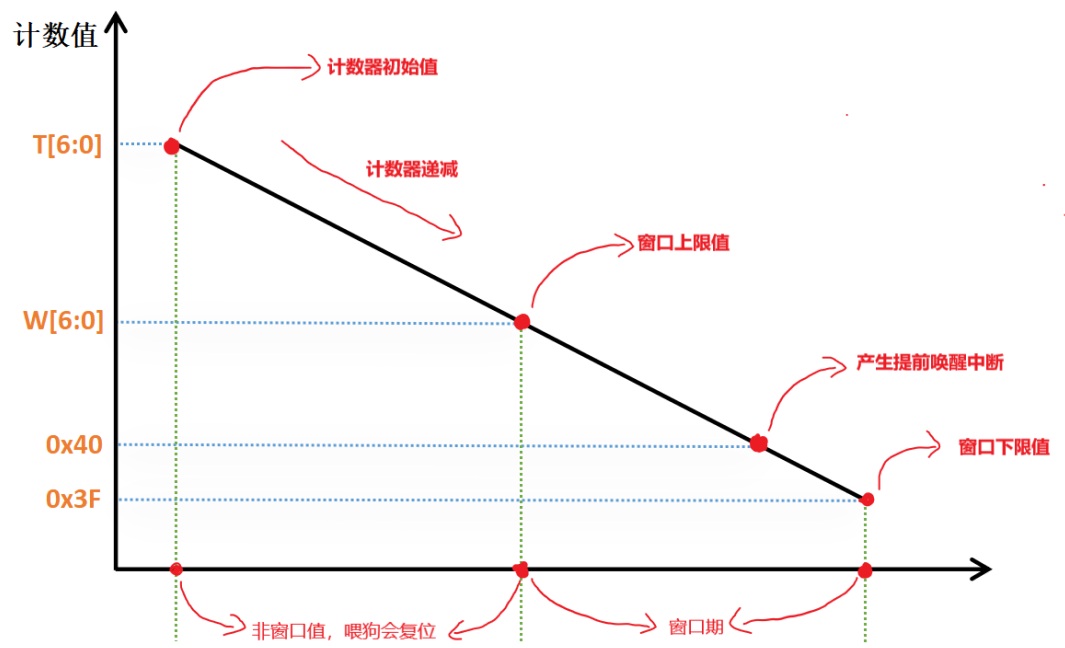
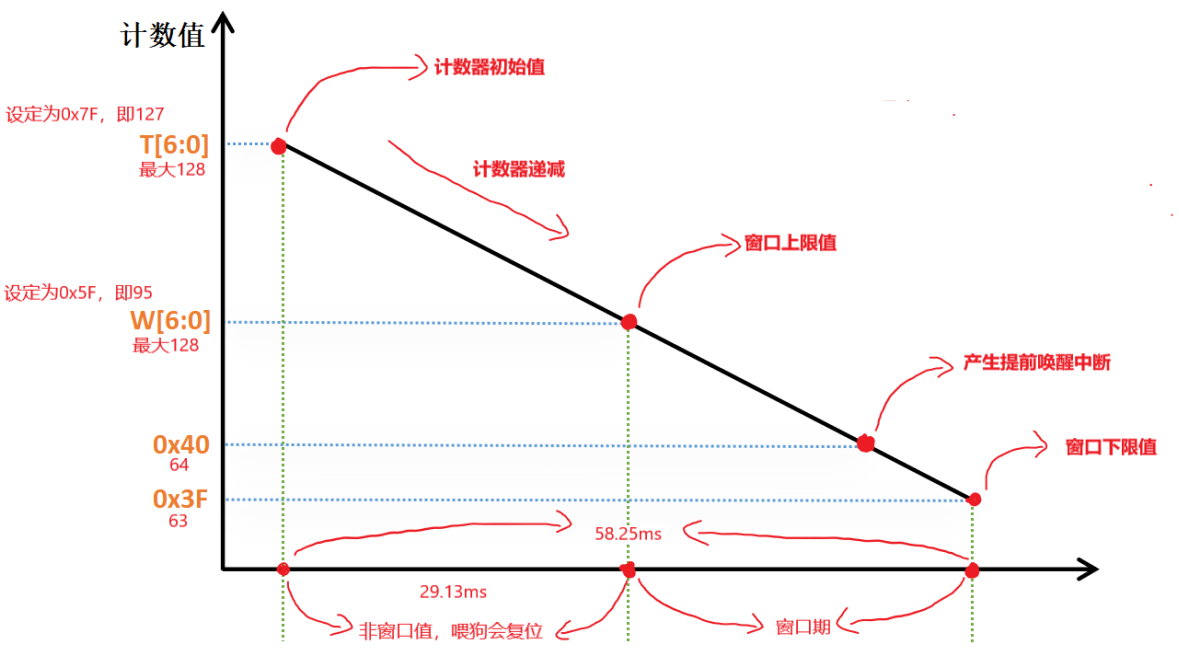
是一个能产生系统复位信号和提前唤醒中断的6位计数器。
产生复位条件:
当递减计数器值递减减到0x3F时复位(即T6位跳变到0)
窗口值在0x3F~W[6:0](0x7F)之间,不在窗口值内喂狗就会复位
产生中断条件:
当计数器递减到0x40时可以产生提前唤醒中断(EWI)。
在窗口期内重装载计数器的值,防止复位,也就是所谓的喂狗。
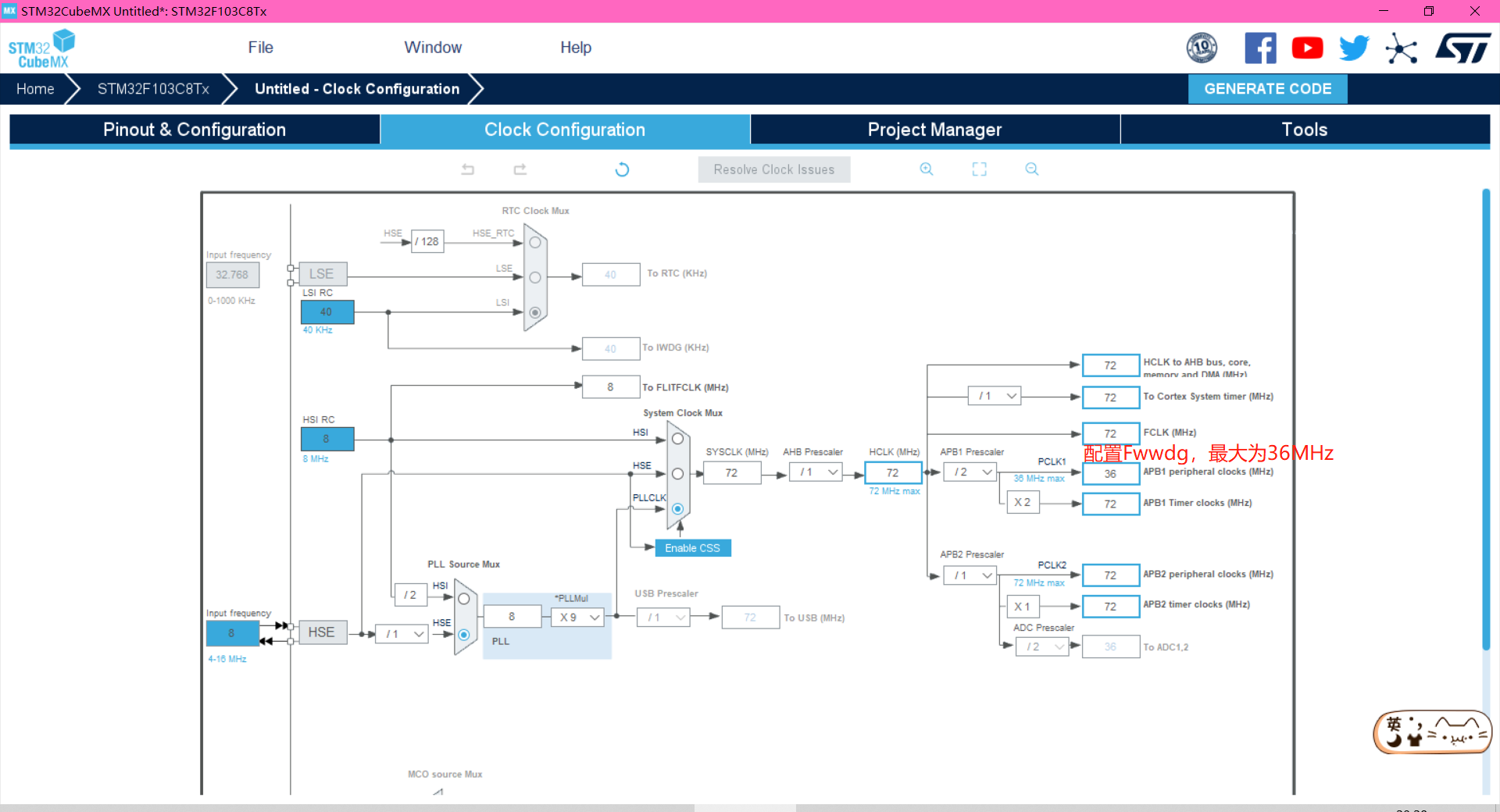
窗口看门狗的时钟
窗口看门狗使用了RCC的时钟PCLK1,最高为36MHz
窗口看门狗框图
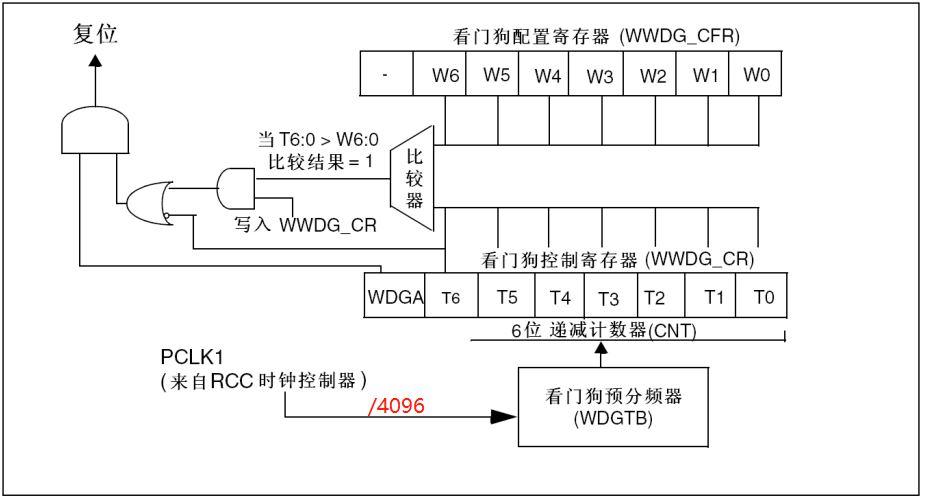
控制寄存器(WWDG_CR)
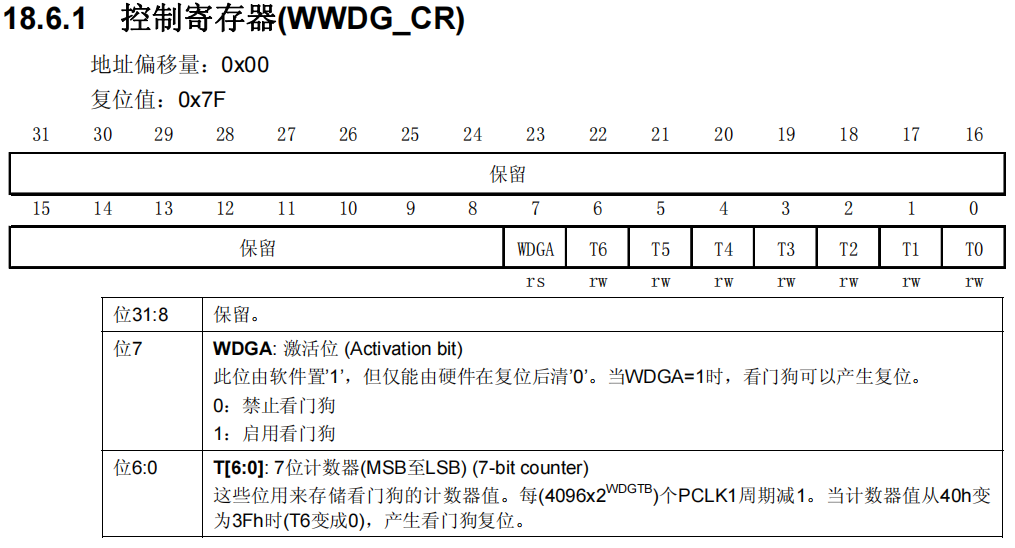
控制窗口关门狗是否开启和配置窗口关门狗计数器初始值。
当计数器值从40h变为3Fh时(T6变成0),产生看门狗复位。
配置寄存器(WWDG_CFR)
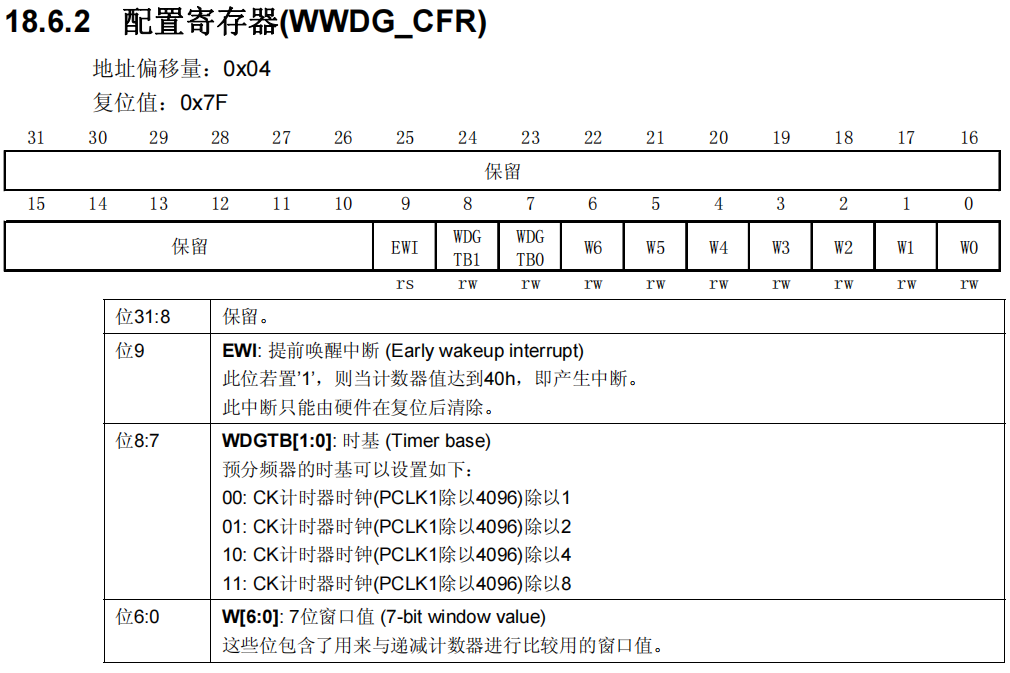
配置窗口关门狗的窗口上限值和配置预分频器系数值
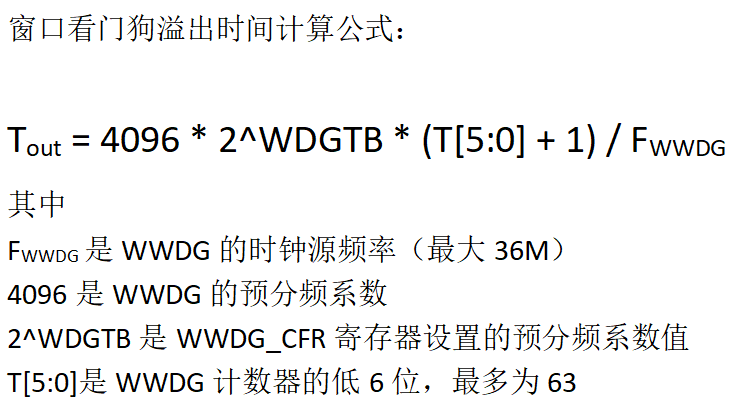
窗口看门狗的溢出时间
状态寄存器(WWDG_SR)
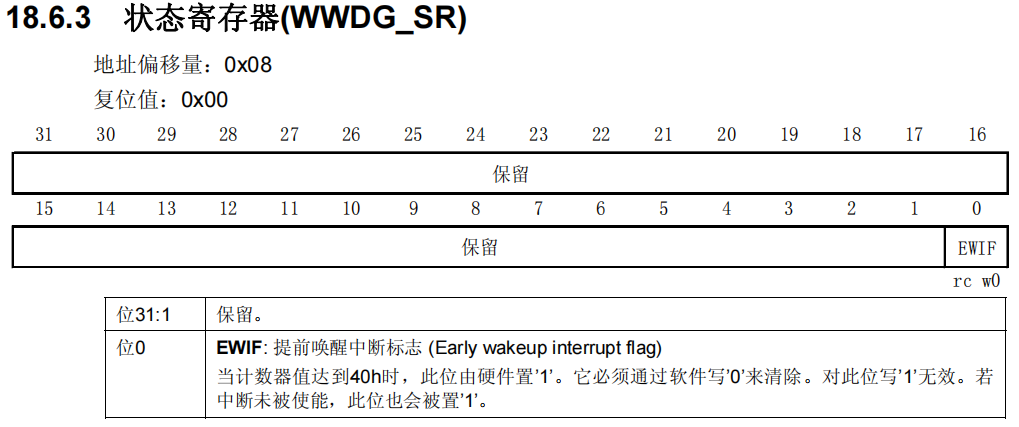
配置窗口看门狗的提前唤醒中断。
窗口看门狗实验
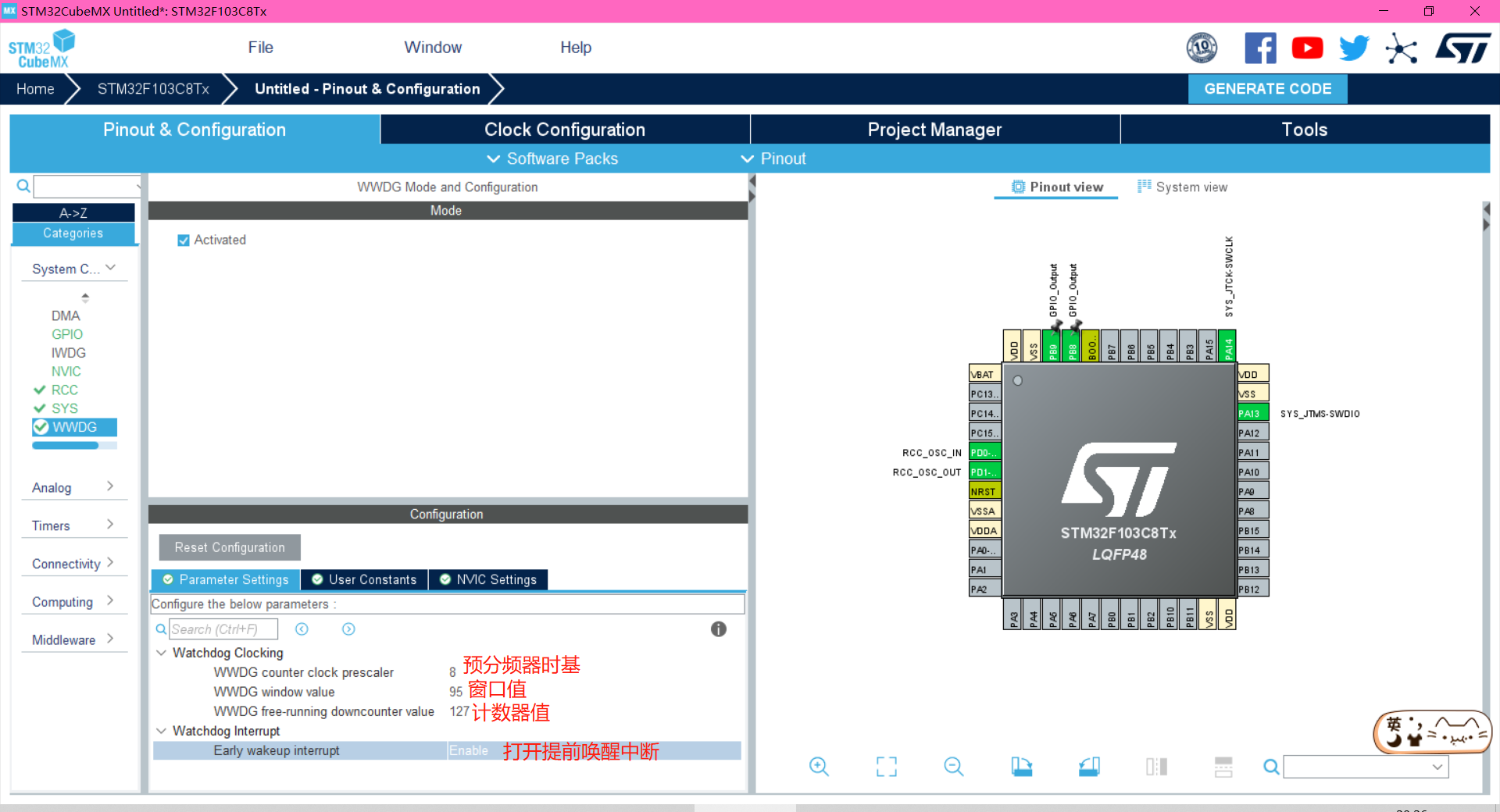
开启窗门看门狗,计数器值设置为0x7F(127),窗口值设置为0x5F(95),预分频器的时基为8,。不喂狗时反复执行main函数,导致LED1闪烁,喂狗时只执行一次main函数,LED1常亮。在提前唤醒中断服务函数进行喂狗,防止程序复位,LED1常亮,同时翻转LED2的状态。
窗口看门狗喂狗函数HAL_StatusTypeDef HAL_WWDG_Refresh()
原型:HAL_StatusTypeDef HAL_WWDG_Refresh(WWDG_HandleTypeDef *hwwdg)
参数:
WWDG_HandleTypeDef *hwwdg:窗门看门狗句柄
实例:HAL_WWDG_Refresh(hwwdg);
使用STM32CubeMX创建工程
配置SYS
配置RCC
配置GPIO
PB9、PB8都配置为输出高电平
配置NVIC
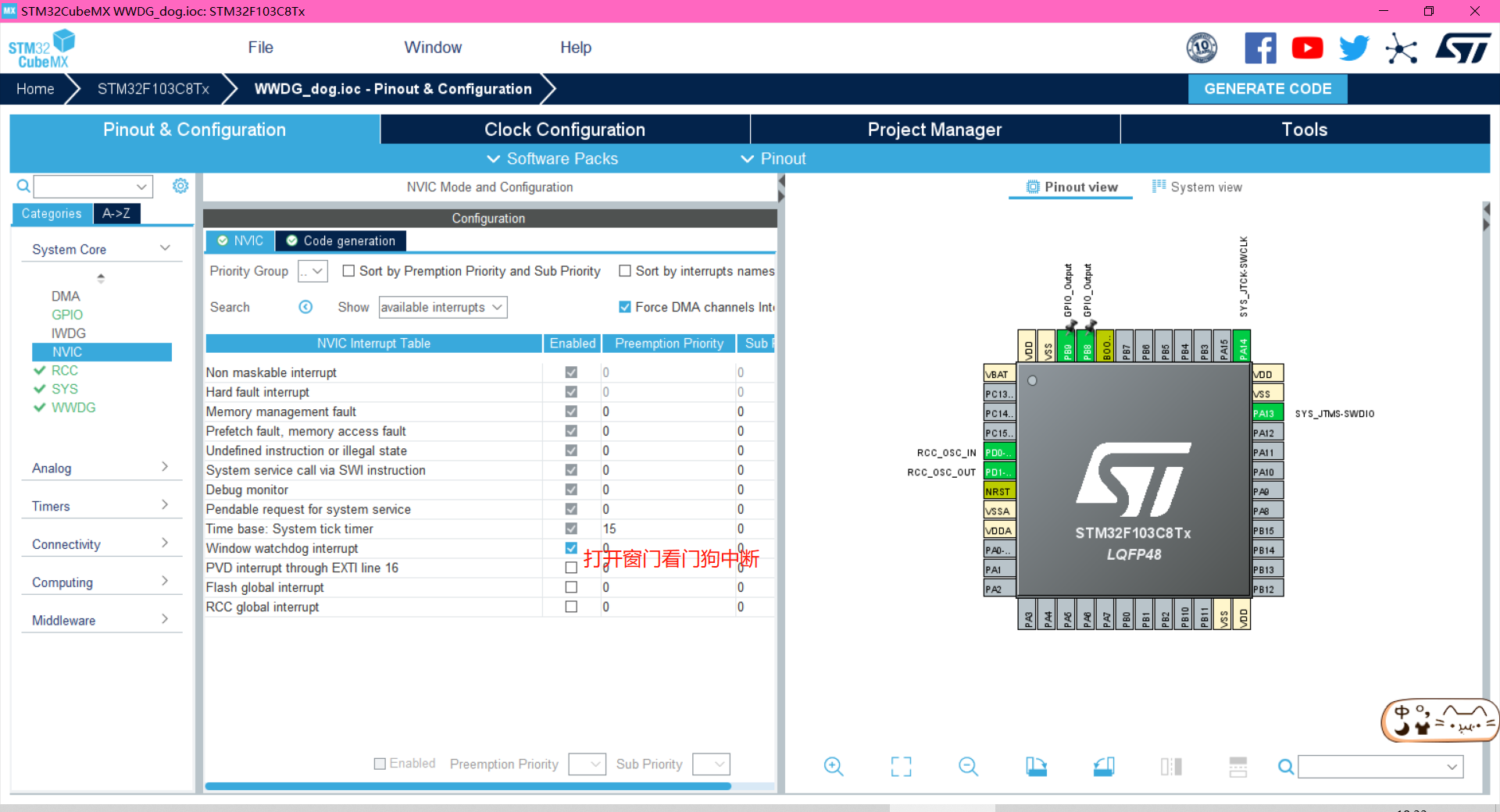
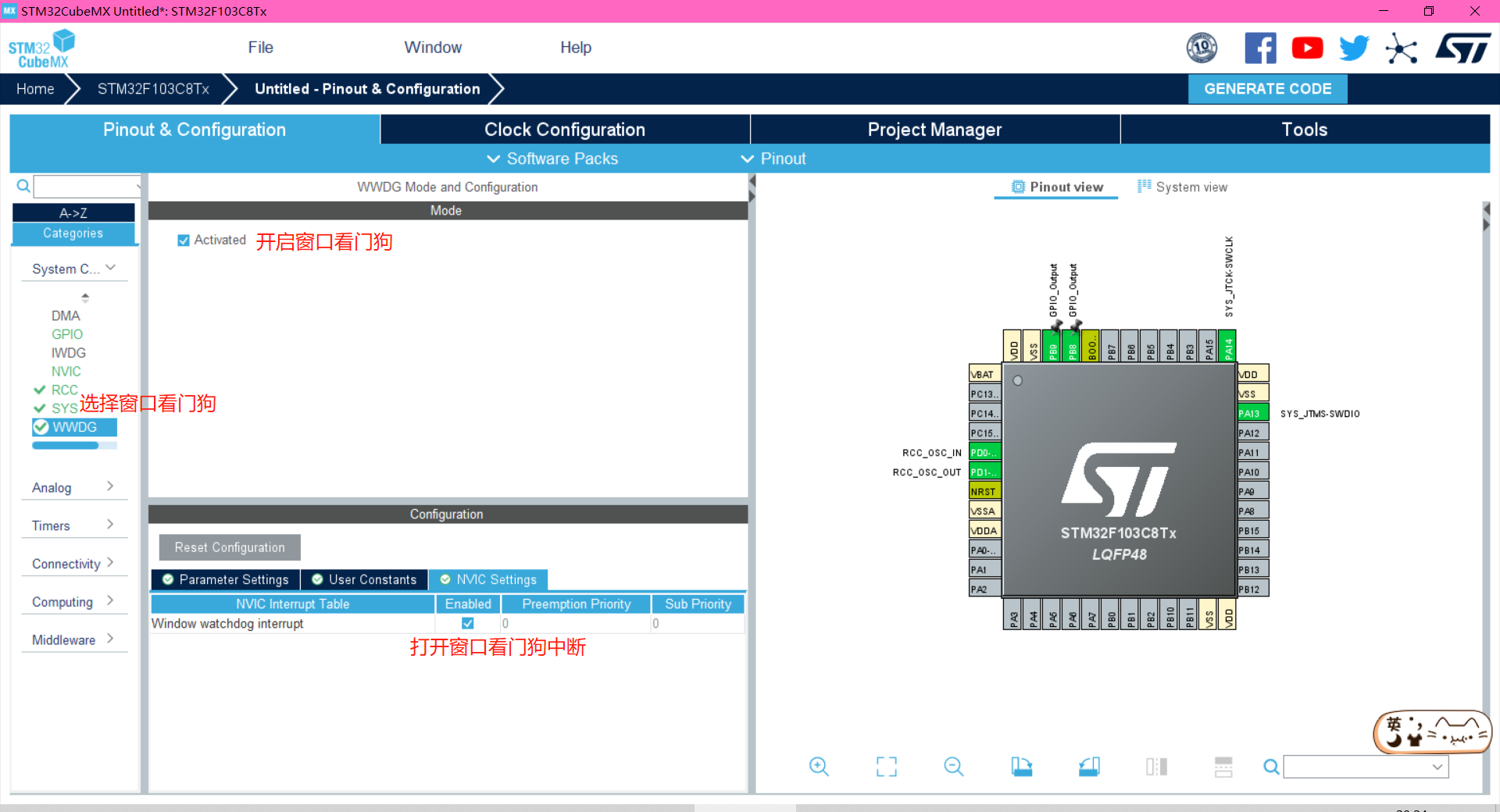
配置WWDG
配置工程名称、工程路径
选择固件库
生成工程
main函数编写
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2023 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "wwdg.h"
#include "gpio.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
//窗口看门狗的提前唤醒中断的中断处理函数
void HAL_WWDG_EarlyWakeupCallback(WWDG_HandleTypeDef *hwwdg)
{
HAL_WWDG_Refresh(hwwdg); //及时喂狗防止程序复位
HAL_GPIO_TogglePin(GPIOB,GPIO_PIN_9);
}
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_WWDG_Init();
/* USER CODE BEGIN 2 */
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_8,GPIO_PIN_RESET);
HAL_Delay(500);
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_8,GPIO_PIN_SET);
HAL_Delay(500);
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
//如果没喂狗的话,就不会执行该循环,即LED1不会常亮
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_8,GPIO_PIN_RESET);
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
独立看门狗和窗口看门狗的异同点
IWDG最适合应用于那些需要看门狗作为一个在主程序之外,能够完全独立工作,并且对时间精度要求较低的场合。
WWDG最适合那些要求看门狗在精确计时窗口起作用的应用程序。
对比点 | 独立看门狗 | 窗口看门狗 |
时钟源 | 独立时钟,LSI(40KHz),不精确 | PCLK1或PCLK3,精确 |
复位条件 | 递减计数到0 | 窗口期外喂狗或减到0x3F |
中断 | 没有中断 | 计数值减到0x40可产生中断 |
递减计数 器位数 | 12位(最大计数范围:4096~0) | 7位(最大计数范围:127~63) |
应用场合 | 防止程序跑飞,死循环,死机 | 检测程序时效,防止软件异常 |