目录
前言
“快照”在 MVCC 里是怎么工作的?
更新逻辑
-
前言
- 讲事务隔离级别的时候提到过,如果是可重复读隔离级别,事务 T 启动的时候会创建一个视图 read-view
- 之后事务 T 执行期间,即使有其他事务修改了数据,事务 T 看到的仍然跟在启动时看到的一样
- 也就是说,一个在可重复读隔离级别下执行的事务,好像与世无争,不受外界影响
- 但是在上一篇文章中,和你分享行锁的时候又提到,一个事务要更新一行,如果刚好有另外一个事务拥有这一行的行锁,它又不能这么超然了,会被锁住,进入等待状态
- 问题是,既然进入了等待状态,那么等到这个事务自己获取到行锁要更新数据的时候,它读到的值又是什么呢?
- 举一个例子,下面是一个只有两行的表的初始化语句


- 这里需要注意的是事务的启动时机
- begin/start transaction 命令并不是一个事务的起点,在执行到它们之后的第一个操作 InnoDB 表的语句,事务才真正启动
- 如果你想要马上启动一个事务,可以使用 start transaction with consistent snapshot 这个命令
- 第一种启动方式,一致性视图是在执行第一个快照读语句时创建的;
- 第二种启动方式,一致性视图是在执行 start transaction with consistent snapshot 时创建的
- 还需要注意的是,例子中如果没有特别说明,都是默认autocommit=1
- 在这个例子中,事务 C 没有显式地使用 begin/commit,表示这个 update 语句本身就是一个事务,语句完成的时候会自动提交
- 事务 B 在更新了行之后查询 ; 事务 A 在一个只读事务中查询,并且时间顺序上是在事务 B 的查询之后
- 这时如果我告诉你事务 B 查到的 k 的值是 3,而事务 A 查到的 k 的值是 1,你是不是感觉有点晕呢?
- 在 MySQL 里,有两个“视图”的概念:
- 一个是 view
- 它是一个用查询语句定义的虚拟表,在调用的时候执行查询语句并生成结果
- 创建视图的语法是 create view … ,而它的查询方法与表一样
- 另一个是 InnoDB 在实现 MVCC 时用到的一致性读视图,即 consistent read view,用于支持 RC(Read Committed,读提交)和 RR(Repeatable Read,可重复读)隔离级别的实现
- 它没有物理结构,作用是事务执行期间用来定义“我能看到什么数据”
-
“快照”在 MVCC 里是怎么工作的?
- 在可重复读隔离级别下,事务在启动的时候就“拍了个快照”
- 注意,这个快照是基于整库的
- 这时,你会说这看上去不太现实啊
- 如果一个库有 100G,那么我启动一个事务,MySQL 就要拷贝 100G 的数据出来,这个过程得多慢啊
- 可是平时的事务执行起来很快啊
- 实际上并不需要拷贝出这 100G 的数据
- 先来看看这个快照是怎么实现的
- InnoDB 里面每个事务有一个唯一的事务 ID,叫作 transaction id
- 它是在事务开始的时候向 InnoDB 的事务系统申请的,是按申请顺序严格递增的
- 而每行数据也都是有多个版本的
- 每次事务更新数据的时候,都会生成一个新的数据版本,并且把 transaction id 赋值给这个数据版本的事务 ID,记为 row trx_id
- 同时,旧的数据版本要保留,并且在新的数据版本中,能够有信息可以直接拿到它
- 也就是说,数据表中的一行记录,其实可能有多个版本 (row),每个版本有自己的 row trx_id
- 如图 2 所示,就是一个记录被多个事务连续更新后的状态

- 图中虚线框里是同一行数据的 4 个版本
- 当前最新版本是 V4,k 的值是 22,它是被transaction id 为 25 的事务更新的,因此它的 row trx_id 也是 25
- 你可能会问,前面的文章不是说,语句更新会生成 undo log(回滚日志)吗?那么,undo log 在哪呢?
- 实际上,图 2 中的三个虚线箭头,就是 undo log
- 而 V1、V2、V3 并不是物理上真实存在的,而是每次需要的时候根据当前版本和 undo log 计算出来的
- 比如,需要 V2 的时候,就是通过 V4 依次执行 U3、U2 算出来
- 明白了多版本和 row trx_id 的概念后,再来想一下,InnoDB 是怎么定义那个“100G”的快照的
- 按照可重复读的定义,一个事务启动的时候,能够看到所有已经提交的事务结果
- 但是之后,这个事务执行期间,其他事务的更新对它不可见
- 因此,一个事务只需要在启动的时候声明说,“以我启动的时刻为准,如果一个数据版本是在我启动之前生成的,就认
- 如果是我启动以后才生成的,我就不认,我必须要找到它的上一个版本”
- 当然,如果“上一个版本”也不可见,那就得继续往前找
- 还有,如果是这个事务自己更新的数据,它自己还是要认的
- 在实现上, InnoDB 为每个事务构造了一个数组,用来保存这个事务启动瞬间,当前正在“活跃”的所有事务 ID
- “活跃”指的就是,启动了但还没提交
- 数组里面事务 ID 的最小值记为低水位,当前系统里面已经创建过的事务 ID 的最大值加 1 记为高水位
- 这个视图数组和高水位,就组成了当前事务的一致性视图(read-view)
- 而数据版本的可见性规则,就是基于数据的 row trx_id 和这个一致性视图的对比结果得到的
- 这个视图数组把所有的 row trx_id 分成了几种不同的情况

- 这样,对于当前事务的启动瞬间来说,一个数据版本的 row trx_id,有以下几种可能:
- 1.如果落在绿色部分,表示这个版本是已提交的事务或者是当前事务自己生成的,这个数据是可见的
- 2.如果落在红色部分,表示这个版本是由将来启动的事务生成的,是肯定不可见的
- 3.如果落在黄色部分,那就包括两种情况
- a.若 row trx_id 在数组中,表示这个版本是由还没提交的事务生成的,不可见
- b.若 row trx_id 不在数组中,表示这个版本是已经提交了的事务生成的,可见
- 比如,对于图 2 中的数据来说,如果有一个事务,它的低水位是 18,那么当它访问这一行数据时,就会从 V4 通过 U3 计算出 V3,所以在它看来,这一行的值是 11
- 有了这个声明后,系统里面随后发生的更新,是不是就跟这个事务看到的内容无关了呢?
- 因为之后的更新,生成的版本一定属于上面所述的情况,而对它来说,这些新的数据版本是不存在的,所以这个事务的快照,就是“静态”的了
- 所以你现在知道了,InnoDB 利用了“所有数据都有多个版本”的这个特性,实现了“秒级创建快照”的能力
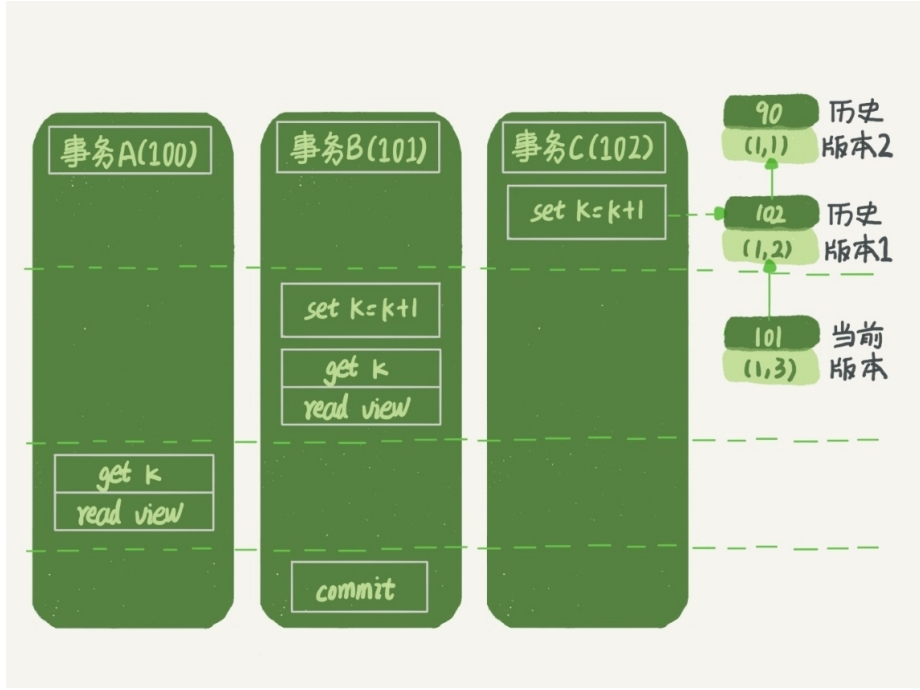
- 接下来,继续看一下前言中的三个事务,分析下事务 A 的语句返回的结果,为什么是k=1
- 这里不妨做如下假设:
- 1.事务 A 开始前,系统里面只有一个活跃事务 ID 是 99
- 2.事务 A、B、C 的版本号分别是 100、101、102,且当前系统里只有这四个事务
- 3.三个事务开始前,(1,1)这一行数据的 row trx_id 是 90
- 这样,事务 A 的视图数组就是[99,100], 事务 B 的视图数组是[99,100,101], 事务 C 的视图数组是[99,100,101,102]
- 为了简化分析,先把其他干扰语句去掉,只画出跟事务 A 查询逻辑有关的操作

- 从图中可以看到,第一个有效更新是事务 C,把数据从 (1,1) 改成了 (1,2)
- 这时候,这个数据的最新版本的 row trx_id 是 102,而 90 这个版本已经成为了历史版本
- 第二个有效更新是事务 B,把数据从 (1,2) 改成了 (1,3)
- 这时候,这个数据的最新版本(即row trx_id)是 101,而 102 又成为了历史版本
- 你可能注意到了,在事务 A 查询的时候,其实事务 B 还没有提交,但是它生成的 (1,3) 这个版本已经变成当前版本了
- 但这个版本对事务 A 必须是不可见的,否则就变成脏读了
- 好,现在事务 A 要来读数据了,它的视图数组是[99,100]
- 当然了,读数据都是从当前版本读起的
- 所以,事务 A 查询语句的读数据流程是这样的:
- 找到 (1,3) 的时候,判断出 row trx_id=101,比高水位大,处于红色区域,不可见
- 接着,找到上一个历史版本,一看 row trx_id=102,比高水位大,处于红色区域,不可见
- 再往前找,终于找到了(1,1),它的 row trx_id=90,比低水位小,处于绿色区域,可见
- 现在用这个规则来判断图 4 中的查询结果,事务 A 的查询语句的视图数组是在事务 A 启动的时候生成的,这时候:
- (1,3) 还没提交,属于情况 1,不可见
- (1,2) 虽然提交了,但是是在视图数组创建之后提交的,属于情况 2,不可见
- (1,1) 是在视图数组创建之前提交的,可见
- 去掉数字对比后,只用时间先后顺序来判断,分析起来是不是轻松多了
- 所以,后面就都用这个规则来分析
-
更新逻辑
- 事务 B 的 update 语句,如果按照一致性读,好像结果不对哦?
- 看图 5 中,事务 B 的视图数组是先生成的,之后事务 C 才提交,不是应该看不见 (1,2)吗,怎么能算出 (1,3) 来?

- 是的,如果事务 B 在更新之前查询一次数据,这个查询返回的 k 的值确实是1
- 但是,当它要去更新数据的时候,就不能再在历史版本上更新了,否则事务 C 的更新就丢失了
- 因此,事务 B 此时的 set k=k+1 是在(1,2)的基础上进行的操作
- 所以这里就用到了这样一条规则:更新数据都是先读后写的,而这个读,只能读当前的值,称为“当前读”(current read)
- 因此,在更新的时候,当前读拿到的数据是 (1,2),更新后生成了新版本的数据 (1,3),这个新版本的 row trx_id 是 101
- 所以,在执行事务 B 查询语句的时候,一看自己的版本号是 101,最新数据的版本号也是101,是自己的更新,可以直接使用,所以查询得到的 k 的值是 3
- 这里提到了一个概念,叫作当前读
- 其实,除了 update 语句外,select 语句如果加锁,也是当前读
- 所以,如果把事务 A 的查询语句 select * from t where id=1 修改一下,加上 lock in share mode 或 for update,也都可以读到版本号是 101 的数据,返回的 k 的值是 3
- 下面这两个 select 语句,就是分别加了读锁(S 锁,共享锁)和写锁(X 锁,排他锁)

- 再往前一步,假设事务 C 不是马上提交的,而是变成了下面的事务 C’,会怎么样呢?

- 事务 C’的不同是,更新后并没有马上提交,在它提交前,事务 B 的更新语句先发起了
- 前面说过了,虽然事务 C’还没提交,但是 (1,2) 这个版本也已经生成了,并且是当前的最新版本
- 那么,事务 B 的更新语句会怎么处理呢?
- 这时候,在上一篇文章中提到的“两阶段锁协议”就要上场了
- 事务 C’没提交,也就是说 (1,2) 这个版本上的写锁还没释放
- 而事务 B 是当前读,必须要读最新版本,而且必须加锁,因此就被锁住了,必须等到事务 C’释放这个锁,才能继续它的当前读

- 到这里,把一致性读、当前读和行锁就串起来了
- 现在再回到文章开头的问题:事务的可重复读的能力是怎么实现的?
- 可重复读的核心就是一致性读(consistent read)
- 而事务更新数据的时候,只能用当前读
- 如果当前的记录的行锁被其他事务占用的话,就需要进入锁等待
- 而读提交的逻辑和可重复读的逻辑类似,它们最主要的区别是:
- 在可重复读隔离级别下,只需要在事务开始的时候创建一致性视图,之后事务里的其他查询都共用这个一致性视图
- 在读提交隔离级别下,每一个语句执行前都会重新算出一个新的视图
- 那么再看一下,在读提交隔离级别下,事务 A 和事务 B 的查询语句查到的 k,分别应该是多少呢?
- 这里需要说明一下,“start transaction with consistent snapshot; ”的意思是从这个语句开始,创建一个持续整个事务的一致性快照
- 所以,在读提交隔离级别下,这个用法就没意义了,等效于普通的 start transaction
- 下面是读提交时的状态图,可以看到这两个查询语句的创建视图数组的时机发生了变化,就是图中的 read view 框(注意:这里,用的还是事务 C 的逻辑直接提交,而不是事务C’)
- 这时,事务 A 的查询语句的视图数组是在执行这个语句的时候创建的
- 时序上 (1,2)、(1,3) 的生成时间都在创建这个视图数组的时刻之前
- 但是,在这个时刻:
- (1,3) 还没提交,属于情况 1,不可见
- (1,2) 提交了,属于情况 3,可见
- 所以这时候事务 A 查询语句返回的是 k=2
- 显然地,事务 B 查询结果 k=3