串口通信
串行接口简称串口,也称串行通信接口或串行通讯接口(通常指COM接口),是采用串行通信方 式的扩展接口。串行接口(Serial Interface)是指数据一位一位地顺序传送。其特点是通信线路简 单,只要一对传输线就可以实现双向通信(可以直接利用电话线作为传输线),从而大大降低了成本,特别适用于远距离通信,但传送速度较慢。
设备之间的一种通信的方式(数据交互)
数据只能一位一位的进行传输
全双工通信
数据传输速度较慢
全双工通信(打电话)
通信允许数据在两个方向上同时传输,它在能力上相当于两个单工通信方式的结合。全双工指可以同时(瞬时)进行信号的双向传输(A→B且B→A)。指A→B的同时B→A,是瞬时同步的。通信允许数据在两个方向上同时传输,它在能力上相当于两个单工通信方式的结合。全双工指可以同时(瞬时)进行信号的双向传输(A→B且B→A)。指A→B的同时B→A,是瞬时同步的。
TTL电平
TTL是Transistor-Transistor Logic,即晶体管-晶体管逻辑的简称,它是计算机处理器控制的设备 内部各部分之间通信的标准技术。TTL电平信号应用广泛,是因为其数据表示采用二进制规定, +5V等价于逻辑”1”,0V等价于逻辑”0”。
字符帧
字符帧也叫数据帧,一帧数据由起始位、数据位、奇偶校验位和停止位组成,对于异步通信,要能够进行数据的正确传送,通信双方必须先约定好传送数据的速率和传送数据的组织格式,即波特率和字符帧的格式。
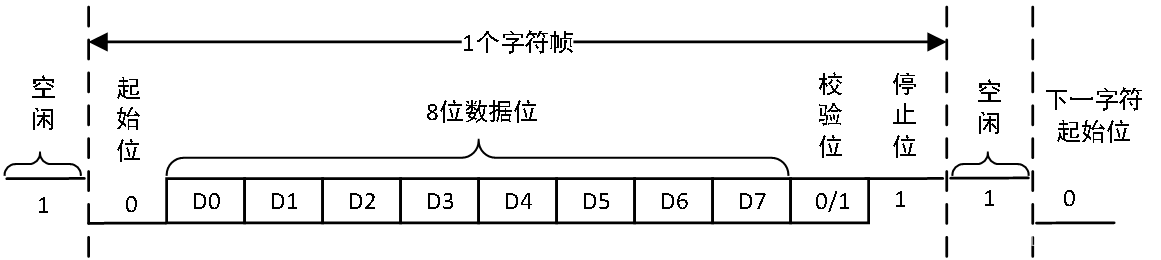
起始位:每开始一次通信时发送方先发出一个逻辑”0”的信号(低电平),表示传输字符的开始。
数据位:数据位可以是5、6、7、8,9位等,构成一个字符(一般都是8位)。如ASCII码(7位),扩展BCD码(8位)。先发送最低位,最后发送最高位,使用低电平表示‘0’高电平表示‘1’完成数据位的传输。
奇偶校验位:计算数据位中“1”的位数应为偶数(偶校验)或奇数(奇校验),以此来校验数据传送的正确性,校验方式:
无校验 (no parity)。
奇校验 (odd parity): 如果数据位中“1”的数目是偶数,则校验位为“1”,如果“1的数目是奇数,校验位为“0”。
偶校验 (even parity): 如果数据为中“1”的数目是偶数,则校验位为“0”,如果为奇数,校验位为“1”。
mark parity: 校验位始终为1 (不常用)。
parity: 校验位始终为0 (不常用)。
停止位:一个字符数据的结束标志。可以是1位、1.5位、2位的高电平。
总之,使用UART串口协议传输数据时,需要规定双方的传输速率(波特率)一致,数据格式(起始位,数据位,奇偶校验为、停止位)也要保持一致。例如传递字符a时,字符a的一帧信息由起始位、数据位(字符a)、奇偶校验位(可选)、停止位组成。
串口之非中断法
STM32的hal库关于串口的函数
HAL_UART_Transmit()
以阻塞的方式向串口发送数据,设定指定时间,超过指定时间后不再发送此次数据,不产生中断
原型:HAL_StatusTypeDef HAL_UART_Transmit(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size, uint32_t Timeout)
参数:
UART_HandleTypeDef *huart:串口句柄
uint8_t *pData:向串口发送的数据的地址
uint16_t Size:向串口发送的数据的大小
uint32_t Timeout:此次数据发送的时间
实例:HAL_UART_Transmit(&huart1,(uint8_t *)"jiangxiaoya\n",strlen("jiangxiaoya\n"),100);
HAL_UART_Receive()
以阻塞的方式从串口接收数据,设定指定时间,超过指定时间后不再接收此次数据,不产生中断
原型:HAL_StatusTypeDef HAL_UART_Receive(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size, uint32_t Timeout)
参数:
UART_HandleTypeDef *huart:串口句柄
uint8_t *pData:从串口接收的数据的存放地址
uint16_t Size:从串口接收的数据的大小(留一个字符存放 '\0' )
uint32_t Timeout:此次数据接收的时间
实例:HAL_UART_Receive(&huart1,myData,sizeof(myData) - 1,100);
使用STM32CubeMX创建工程
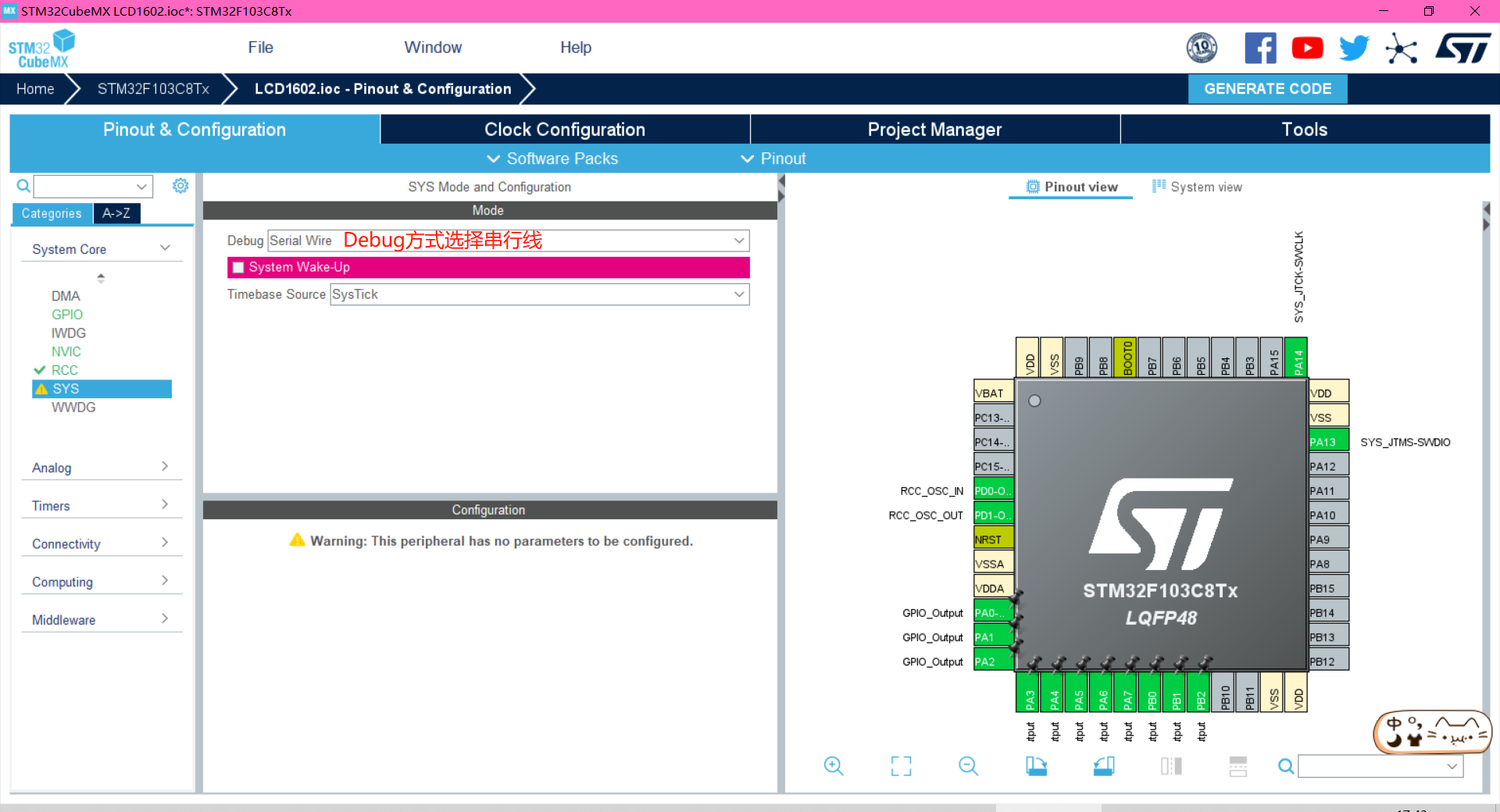
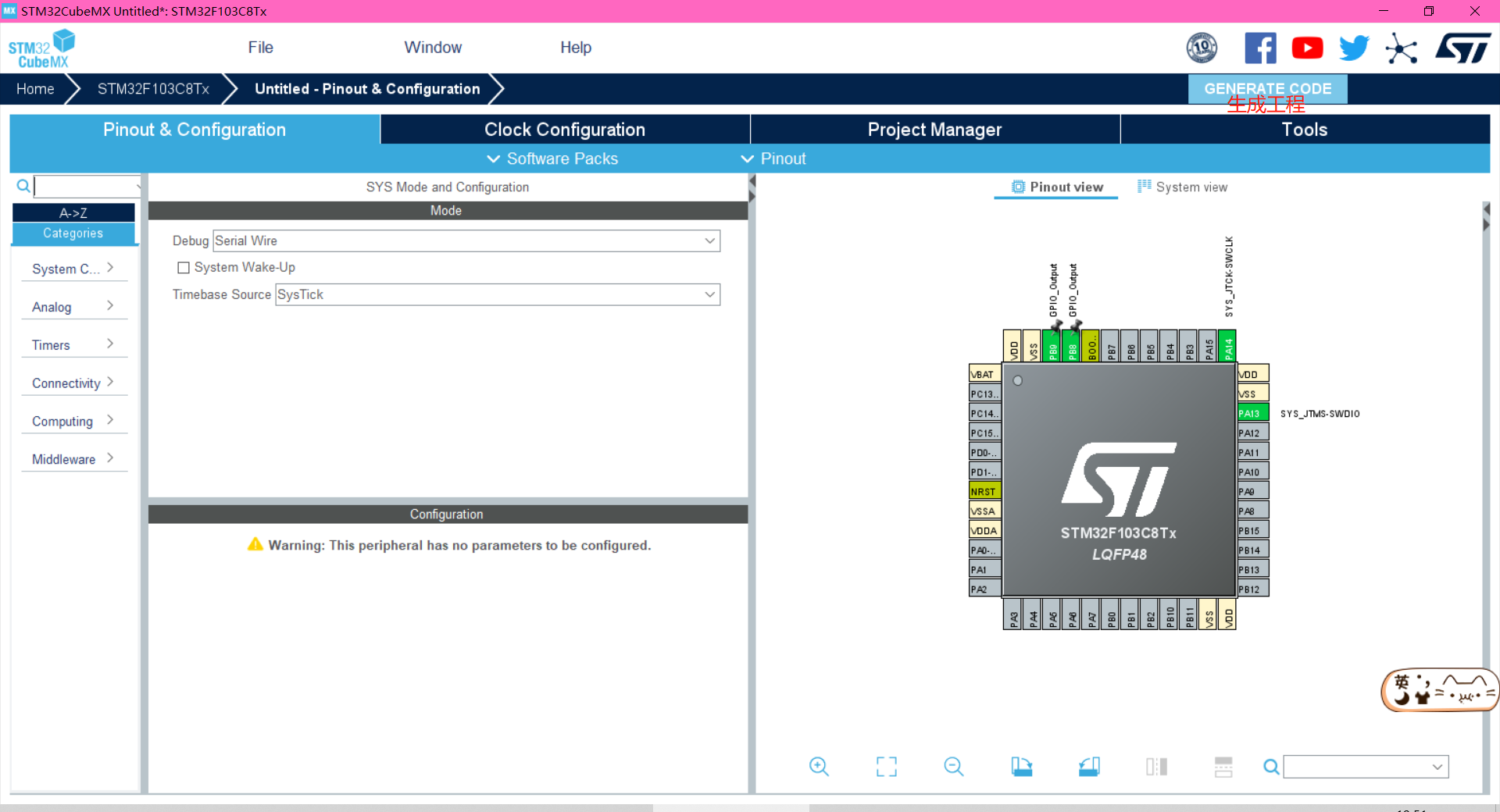
配置SYS
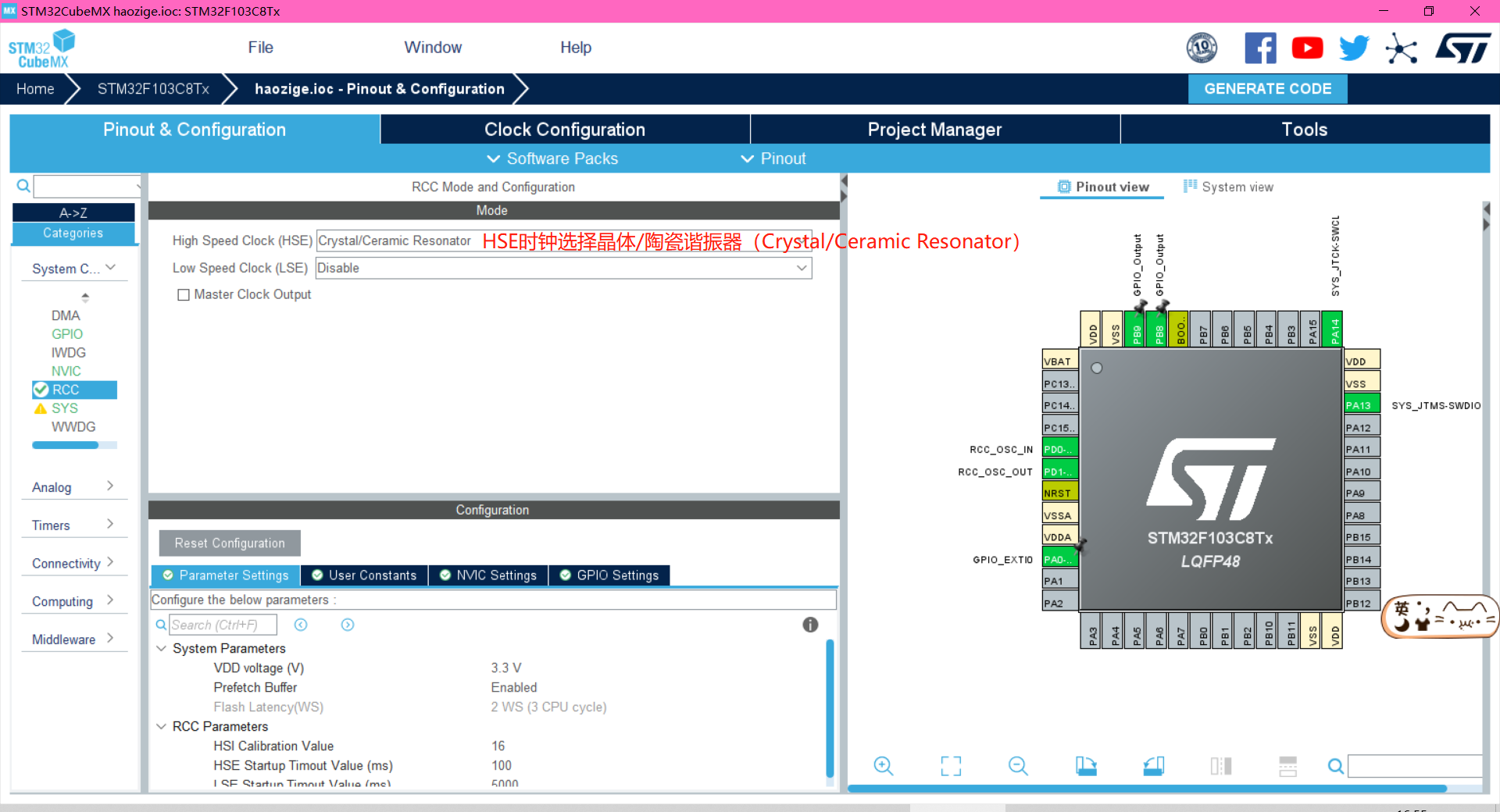
配置RCC
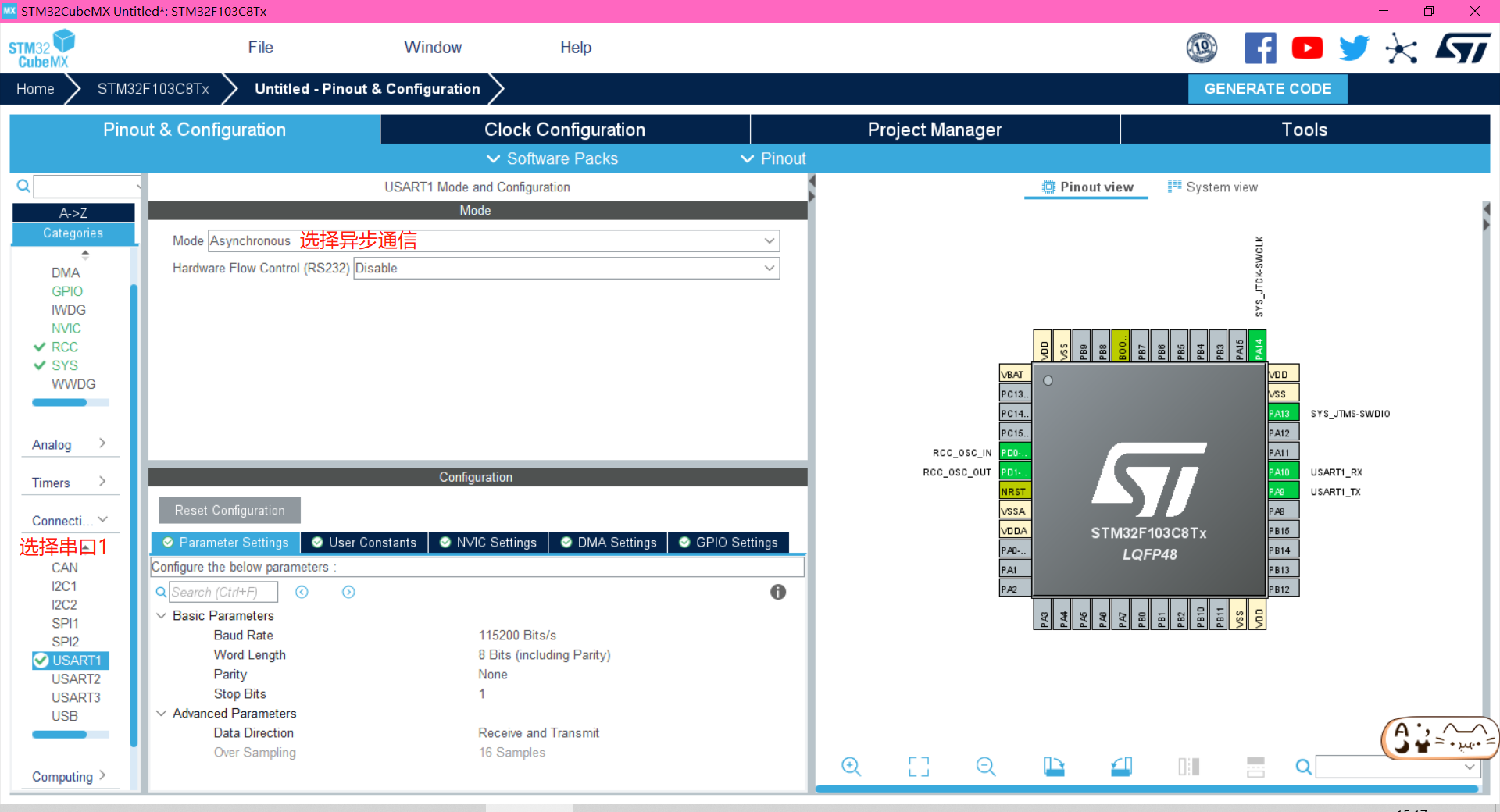
配置串口信息
配置工程名称、工程路径
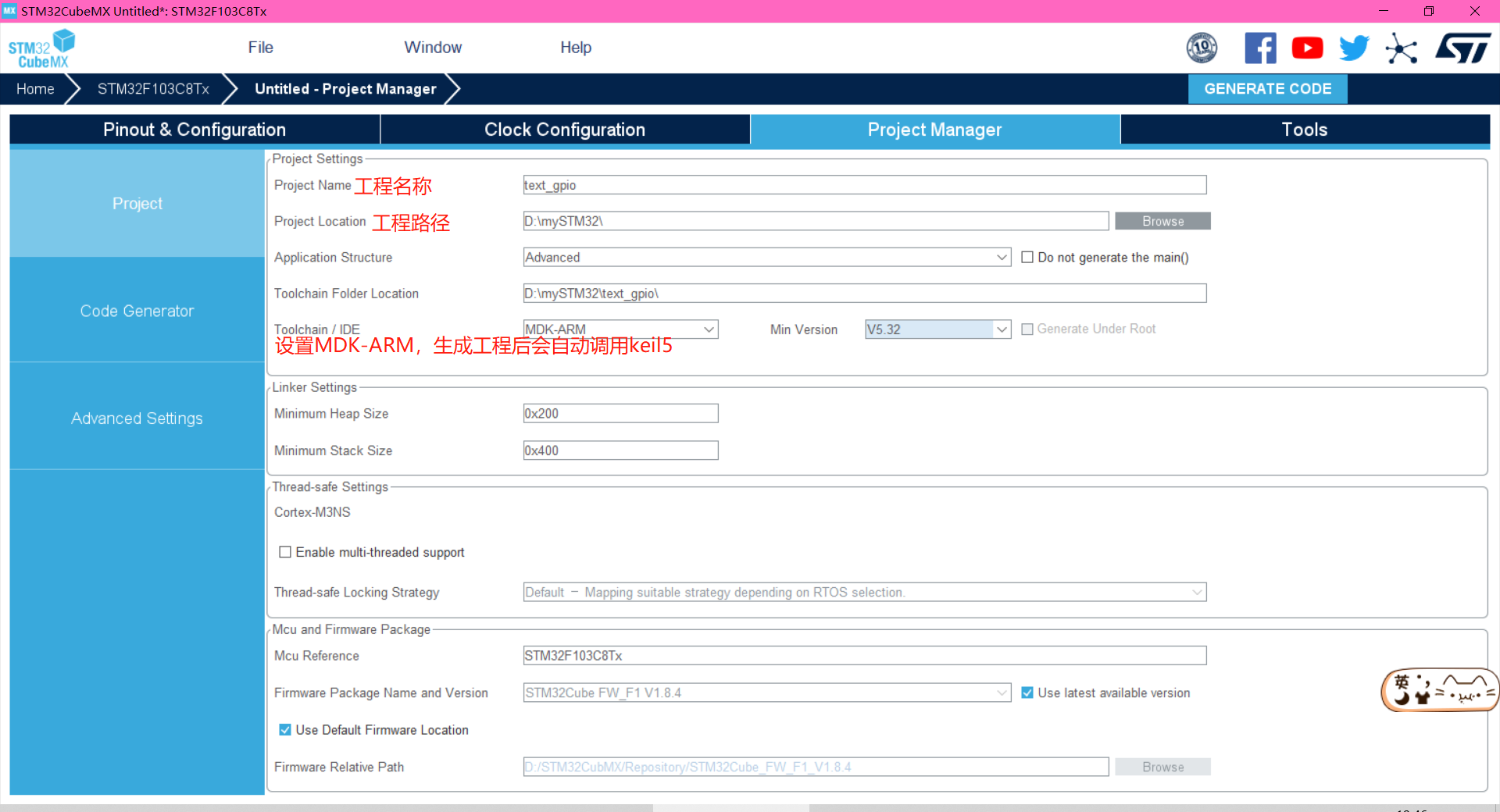
选择固件库
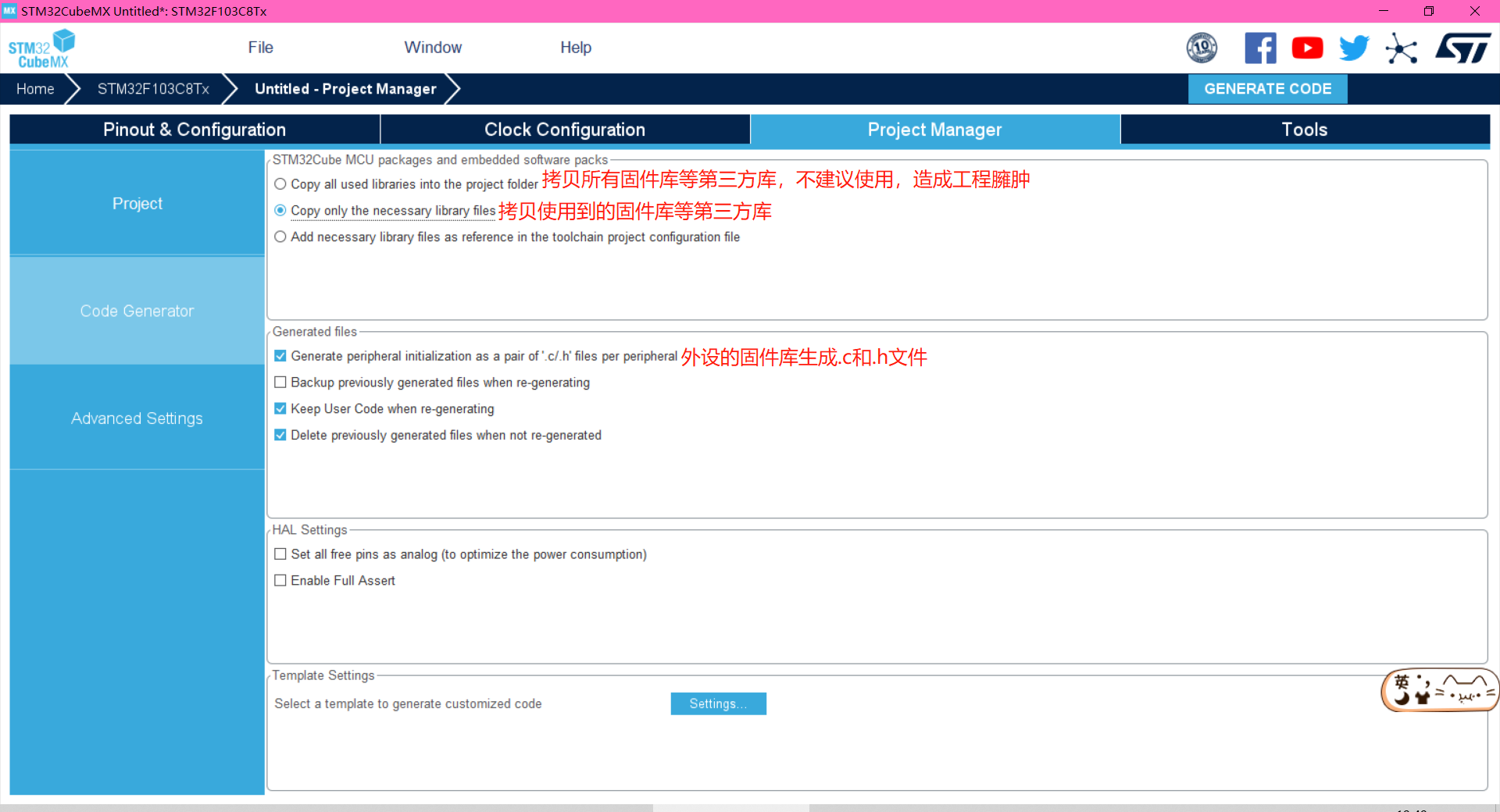
生成工程
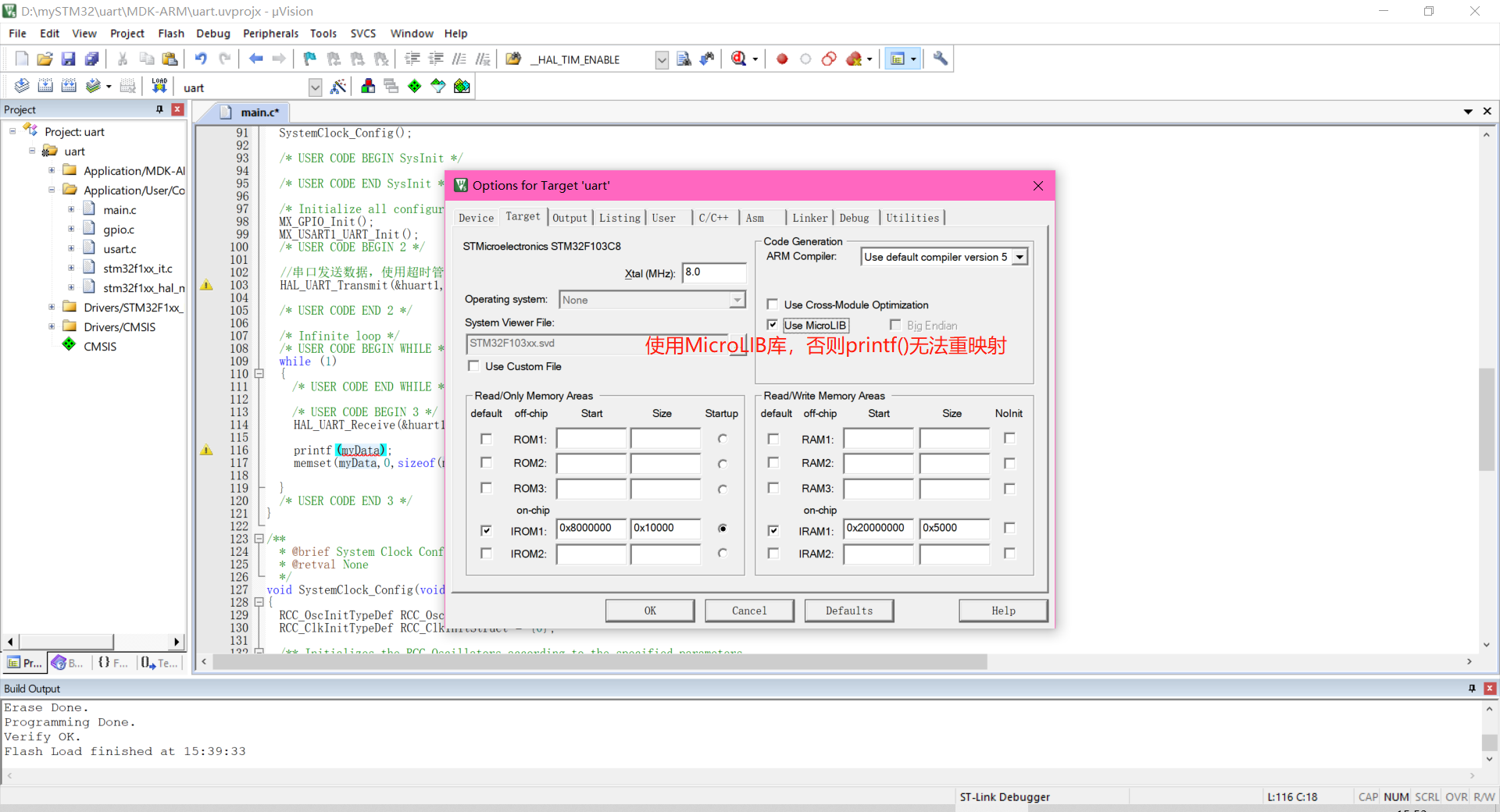
使用MicroLIB库
main函数编写
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2023 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "usart.h"
#include "gpio.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include <string.h>
#include <stdio.h>
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
//重写stdio.c文件中的prinft()里的fputc()函数
int fputc(int my_data,FILE *p)
{
unsigned char temp = my_data;
//改写后,使用printf()函数会将数据通过串口1发送出去
HAL_UART_Transmit(&huart1,&temp,1,0xffff); //0xfffff为最大超时时间
return my_data;
}
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
uint8_t myData[20] = {0};
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_USART1_UART_Init();
/* USER CODE BEGIN 2 */
//串口以阻塞的方式发送数据,超过时间后不再发送此次数据
HAL_UART_Transmit(&huart1,(uint8_t *)"jiangxiaoya\n",strlen("jiangxiaoya\n"),100); //单片机复位后,会发送一个数据
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
//串口以阻塞的方式接收数据,超过时间后不再接收此次数据
HAL_UART_Receive(&huart1,myData,sizeof(myData) - 1,100);
printf("%s\r\n",myData); //向串口发送数据
memset(myData,0,sizeof(myData));
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
疑难点分析
改写stdio.c中的fputc()函数,以便能使用printf()向串口发送数据
//重写stdio.c文件中的prinft()里的fputc()函数
int fputc(int my_data,FILE *p)
{
unsigned char temp = my_data;
//改写后,使用printf()函数会将数据通过串口一发送出去
HAL_UART_Transmit(&huart1,&temp,1,0xffff); //0xfffff为最大超时时间
return my_data;
}串口之中断法
串口数据接收的状态标记变量
该变量可以自行命名,是一个uint16_t 类型的变量如uint16_t UART1_RX_STA = 0。串口每接收到一个数据时,该变量就自增1,当串口接收到回车(0x0d和0x0a),即串口的缓存数据全部接收完成,让该变量的bit16置1,表示数据全部接收完成。
uint16_t UART1_RX_STA | ||
bit 15 | bit 14 | bit 13~0 |
接收数据完成标志 | 接收0x0d标志 | 接收到有效数据个数标志 |
串口接收缓存和接收缓冲
接收缓存:存放串口每次接收的数据(uint8_t buf=0;)
接收缓冲:存放接收缓存(uint8_t UART1_RX_Buffer[USART_REC_LEN] = {'\0'}; )
串口每接收一个字节就会调用一次串口接收数据完成回调函数(HAL_UART_RxCpltCallback()),因此,需要在串口接收数据完成回调函数中对串口每一次接收的数据进行处理,即把数据存放到接收缓冲中。
STM32的hal库关于串口中断的函数
HAL_UART_Transmit_IT()
原型:HAL_StatusTypeDef HAL_UART_Transmit_IT(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size)
参数:
UART_HandleTypeDef *huart:串口句柄
uint8_t *pData:向串口发送的数据的地址
uint16_t Size:向串口发送的数据的大小
HAL_UART_Receive_IT()
原型:HAL_StatusTypeDef HAL_UART_Receive_IT(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size)
参数:
UART_HandleTypeDef *huart:串口句柄
uint8_t *pData:从串口接收的数据的存放地址
uint16_t Size:从串口接收的数据的大小(留一个字符存放 '\0' )
HAL_UART_TxCpltCallback()
串口发送数据完成回调函数,也就是串口发送一个字节数据会产生执行该函数,该函数是一个虚函数,我们可以在main.c文件中完成它的函数体
原型:__weak void HAL_UART_TxCpltCallback(UART_HandleTypeDef *huart)
参数:
UART_HandleTypeDef *huart:串口句柄
HAL_UART_RxCpltCallback()
串口接收数据完成回调函数,也就是串口接收一个字节数据都会产生中断执行该函数,该函数是一个虚函数,我们可以在main.c文件中完成它的函数体
原型:__weak void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
参数:
UART_HandleTypeDef *huart:串口句柄
使用STM32CubeMX创建工程
配置SYS
配置RCC
配置串口信息
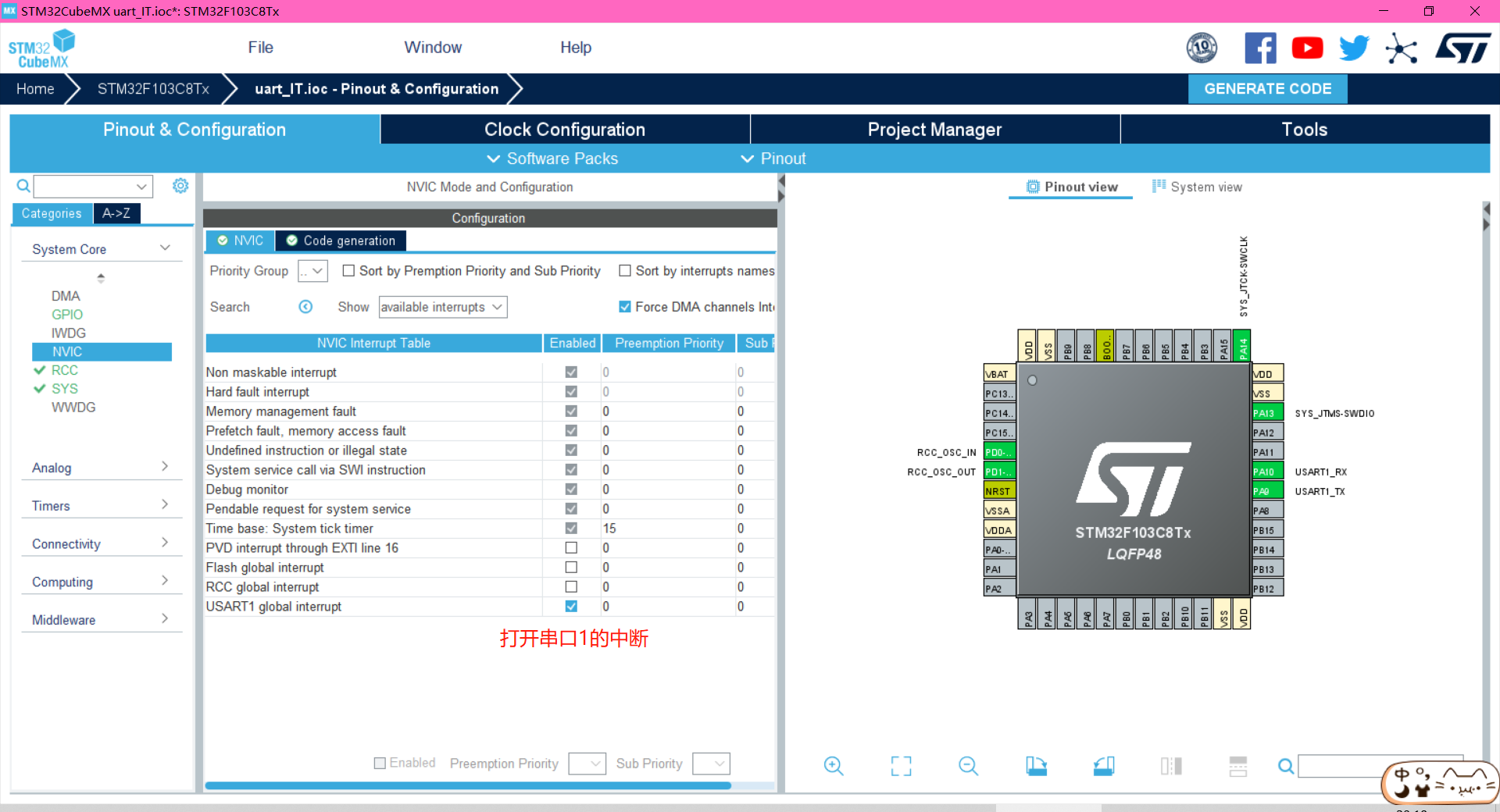
配置NVIC
配置工程名称、工程路径
选择固件库
生成工程
main函数编写
/* USER CODE BEGIN Header */
/**
******************************************************************************
* @file : main.c
* @brief : Main program body
******************************************************************************
* @attention
*
* Copyright (c) 2023 STMicroelectronics.
* All rights reserved.
*
* This software is licensed under terms that can be found in the LICENSE file
* in the root directory of this software component.
* If no LICENSE file comes with this software, it is provided AS-IS.
*
******************************************************************************
*/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"
#include "usart.h"
#include "gpio.h"
/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include <stdio.h>
#define USART_REC_LEN 200 //定义串口最大接收字符
/* USER CODE END Includes */
/* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
//串口接收缓存(1字节)
uint8_t buf = 0;
uint8_t UART1_RX_Buffer[USART_REC_LEN] = {'\0'}; //接收缓冲,串口接收的数据存放地点
//串口接收状态,16位
uint16_t UART1_RX_STA = 0;
//bit15: 如果是1表示接收完成
//bit14: 如果是1表示接收到回车(0x0d)
//bit13~bit0: 接收到的有效字节数目
/* USER CODE END PTD */
/* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
/* USER CODE END PD */
/* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
/* USER CODE END PM */
/* Private variables ---------------------------------------------------------*/
/* USER CODE BEGIN PV */
/* USER CODE END PV */
/* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
/* USER CODE BEGIN PFP */
/* USER CODE END PFP */
/* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
//串口接收回调函数,串口每接收到一个字节数据就会调用一次
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
static int cnt = 0;
//判断中断是否串口1触发的
if(huart->Instance == USART1){
//判断串口的缓存数据是否全部接收完成,即判断UART1_RX_STA的bit15是否为1
if(!(UART1_RX_STA & 0x8000)){ //如果没接收完成
//判断是否接收到回车:0x0d + 0x0a
if(UART1_RX_STA & 0x4000){ //如果接收到0x0d
//判断是否接收到0x0a
if(buf == 0x0a){ //如果接收到0x0a,即此时接收到回车
UART1_RX_STA |= 0x8000; //串口的缓存数据全部接收完成
}else{ //如果接收到0x0d没有接收到换行0x0a
cnt++;
UART1_RX_STA = 0;//则认为此次接收错误,串口重新开始接收下一字节数据
if(cnt == USART_REC_LEN){
UART1_RX_STA |= 0xbfff; //如果收到0x0d后接收的100个字符内没有0x0a,就把UART1_RX_STA的bit14拉低,表示没有接收到0x0d
}
}
}else{ //如果没有接收到回车0x0d
//则判断收到的这个字符是否是回车0x0d
if(buf == 0x0d){ //如果该字符是0x0d
UART1_RX_STA |= 0x4000; //则将bit14拉高,表示接收到0x0d
}else{ //如果不是0x0d
//则将这个字符存放到缓存数组中
UART1_RX_Buffer[UART1_RX_STA & 0x3ffff] = buf;
UART1_RX_STA++;
//如果接收的数据大于UART1_REC_LEN(200字节),则重新开始接收
if(UART1_RX_STA > USART_REC_LEN - 1){
UART1_RX_STA = 0;
}
}
}
}
cnt = 0;
HAL_UART_Receive_IT(&huart1, &buf, 1); //串口重新开启接收下一字节数据
}
}
//重写stdio.h文件中的prinft()里的fputc()函数
int fputc(int my_data,FILE *p)
{
unsigned char temp = my_data;
//改写后,使用printf()函数会将数据通过串口一发送出去
HAL_UART_Transmit(&huart1,&temp,1,0xffff); //0xfffff为最大超时时间
return my_data;
}
/* USER CODE END 0 */
/**
* @brief The application entry point.
* @retval int
*/
int main(void)
{
/* USER CODE BEGIN 1 */
/* USER CODE END 1 */
/* MCU Configuration--------------------------------------------------------*/
/* Reset of all peripherals, Initializes the Flash interface and the Systick. */
HAL_Init();
/* USER CODE BEGIN Init */
/* USER CODE END Init */
/* Configure the system clock */
SystemClock_Config();
/* USER CODE BEGIN SysInit */
/* USER CODE END SysInit */
/* Initialize all configured peripherals */
MX_GPIO_Init();
MX_USART1_UART_Init();
/* USER CODE BEGIN 2 */
//开启接收中断
HAL_UART_Receive_IT(&huart1,&buf,1); //开始接收串口的第一个字节,当接收到一个字节后就会产生中断进入接收回调函数
/* USER CODE END 2 */
/* Infinite loop */
/* USER CODE BEGIN WHILE */
while (1)
{
/* USER CODE END WHILE */
/* USER CODE BEGIN 3 */
//判断判断串口是否接收完成
if(UART1_RX_STA & 0x8000){
printf("接收完成\r\n");
//将接收到的数据发送到串口
HAL_UART_Transmit(&huart1,UART1_RX_Buffer,UART1_RX_STA & 0x3fff,0xffff);
//等待发送完成
while(huart1.gState != HAL_UART_STATE_READY);
//换行,重新开始下一次接收
printf("\r\n");
UART1_RX_STA = 0;
}
//心跳包
printf("haozigegie1\r\n");
HAL_Delay(1000);
}
/* USER CODE END 3 */
}
/**
* @brief System Clock Configuration
* @retval None
*/
void SystemClock_Config(void)
{
RCC_OscInitTypeDef RCC_OscInitStruct = {0};
RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
/** Initializes the RCC Oscillators according to the specified parameters
* in the RCC_OscInitTypeDef structure.
*/
RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
RCC_OscInitStruct.HSEState = RCC_HSE_ON;
RCC_OscInitStruct.HSEPredivValue = RCC_HSE_PREDIV_DIV1;
RCC_OscInitStruct.HSIState = RCC_HSI_ON;
RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
RCC_OscInitStruct.PLL.PLLMUL = RCC_PLL_MUL9;
if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
{
Error_Handler();
}
/** Initializes the CPU, AHB and APB buses clocks
*/
RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
|RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV2;
RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1;
if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK)
{
Error_Handler();
}
}
/* USER CODE BEGIN 4 */
/* USER CODE END 4 */
/**
* @brief This function is executed in case of error occurrence.
* @retval None
*/
void Error_Handler(void)
{
/* USER CODE BEGIN Error_Handler_Debug */
/* User can add his own implementation to report the HAL error return state */
__disable_irq();
while (1)
{
}
/* USER CODE END Error_Handler_Debug */
}
#ifdef USE_FULL_ASSERT
/**
* @brief Reports the name of the source file and the source line number
* where the assert_param error has occurred.
* @param file: pointer to the source file name
* @param line: assert_param error line source number
* @retval None
*/
void assert_failed(uint8_t *file, uint32_t line)
{
/* USER CODE BEGIN 6 */
/* User can add his own implementation to report the file name and line number,
ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
/* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */
疑难点分析
fputc()函数分析
改写stdio.c中的fputc()函数,以便能使用printf()向串口发送数据
//重写stdio.c文件中的prinft()里的fputc()函数
int fputc(int my_data,FILE *p)
{
unsigned char temp = my_data;
//改写后,使用printf()函数会将数据通过串口一发送出去
HAL_UART_Transmit(&huart1,&temp,1,0xffff); //0xfffff为最大超时时间
return my_data;
}串口接收回调函数分析
当在main.c串口初始化后调用HAL_UART_Receive_IT()开始串口接收第一个字节数据,当接收到一个字节(即接收到接收缓存buf中)后就会产生中断进入接收回调函数对接收的数据进行处理
如果该字节不是0x0d或0x0a则存到接收缓冲中
如果该字节是0x0d,则串口数据接收的状态标记变量不再增加,等待接收到0x0a。
如果没有接收到0x0a则认为此次接收失败,则重新开始下一次接收。如果在接下来的100个字符内一直接收不到0x0a,则将UART1_RX_STA的bit14置0,表示没有接收到0x0d。
如果接收到了0x0a,则UART1_RX_STA的bit15置1表示数据全部接收完成,并等待该位被其他程序清除,重新开始下一次的串口接收。
如果迟迟没有接收到0x0d,那么在接收字节超过USART_REC_LEN时,摈弃前面的数据,重新开始接收数据。
//串口接收回调函数,串口每接收到一个字节数据就会调用一次
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
static int cnt = 0;
//判断中断是否串口1触发的
if(huart->Instance == USART1){
//判断串口的缓存数据是否全部接收完成,即判断UART1_RX_STA的bit15是否为1
if(!(UART1_RX_STA & 0x8000)){ //如果没接收完成
//判断是否接收到回车:0x0d + 0x0a
if(UART1_RX_STA & 0x4000){ //如果接收到0x0d
//判断是否接收到0x0a
if(buf == 0x0a){ //如果接收到0x0a,即此时接收到回车
UART1_RX_STA |= 0x8000; //串口的缓存数据全部接收完成
}else{ //如果接收到0x0d没有接收到换行0x0a
cnt++;
UART1_RX_STA = 0;//则认为此次接收错误,串口重新开始接收下一字节数据
if(cnt == USART_REC_LEN){
UART1_RX_STA |= 0xbfff; //如果收到0x0d后接收的100个字符内没有0x0a,就把UART1_RX_STA的bit14拉低,表示没有接收到0x0d
}
}
}else{ //如果没有接收到回车0x0d
//则判断收到的这个字符是否是回车0x0d
if(buf == 0x0d){ //如果该字符是0x0d
UART1_RX_STA |= 0x4000; //则将bit14拉高,表示接收到0x0d
}else{ //如果不是0x0d
//则将这个字符存放到缓存数组中
UART1_RX_Buffer[UART1_RX_STA & 0x3ffff] = buf;
UART1_RX_STA++;
//如果接收的数据大于UART1_REC_LEN(200字节),则重新开始接收
if(UART1_RX_STA > USART_REC_LEN - 1){
UART1_RX_STA = 0;
}
}
}
}
cnt = 0;
HAL_UART_Receive_IT(&huart1, &buf, 1); //串口重新开启接收下一字节数据
}
}