目录
前言
1. 悬架系统
2.ADRC流程图
3.仿真分析
3.1 性能指标和观测效果对比
3.2控制输入对比
3.3 性能指标均方根对比
4.总结
前言
之前通过4篇文章介绍了ADRC,并且在最后一篇文章中进行了总结和应用,本篇文章继续将其应用于悬架对象上,并且在相同的调节参数下,对比测试和PID的控制效果。
上几篇文章推荐阅读链接:
自抗扰控制ADRC之三种微分跟踪器TD仿真分析_Mr. 邹的博客-CSDN博客
自抗扰控制ADRC之扩张观测器_Mr. 邹的博客-CSDN博客
自抗扰控制ADRC之反馈控制律(NLSEF)_Mr. 邹的博客-CSDN博客
ADRC自抗扰控制总结_Mr. 邹的博客-CSDN博客
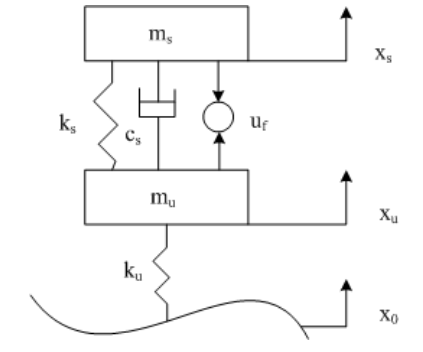
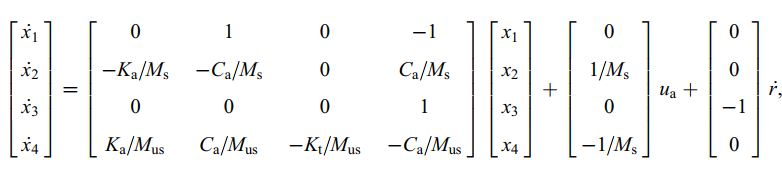
1. 悬架系统
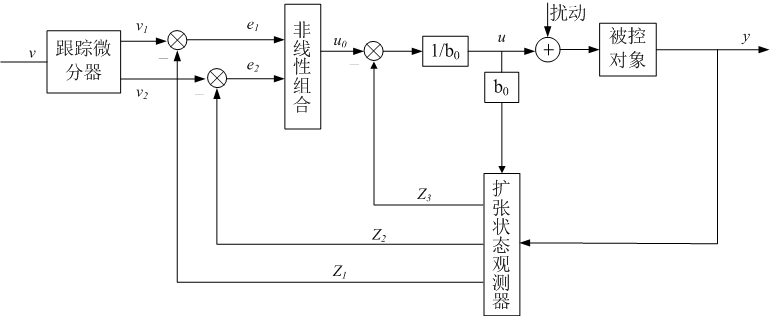
2.ADRC流程图
3.仿真分析
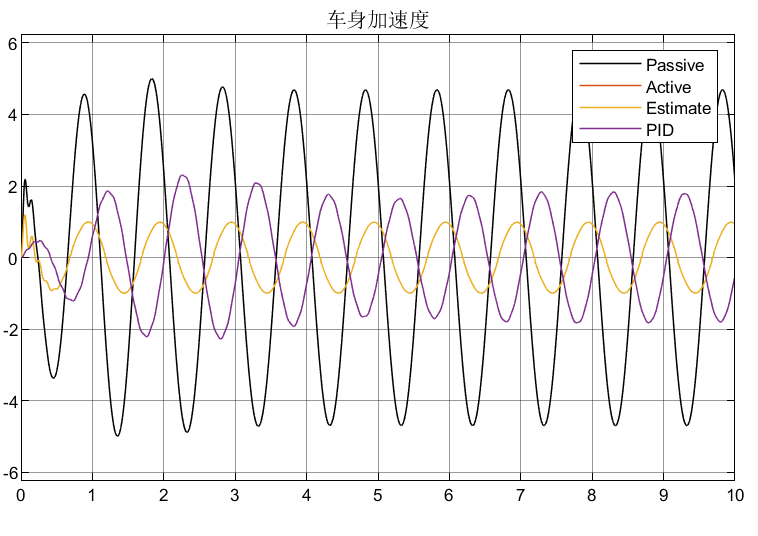
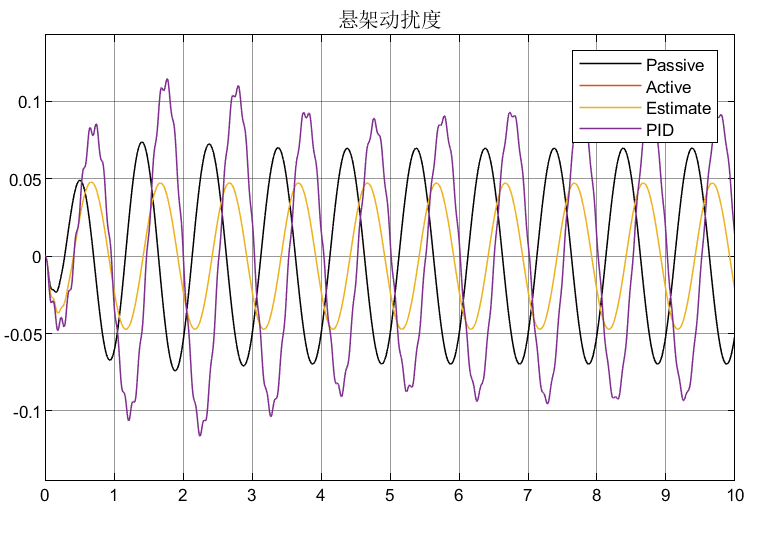
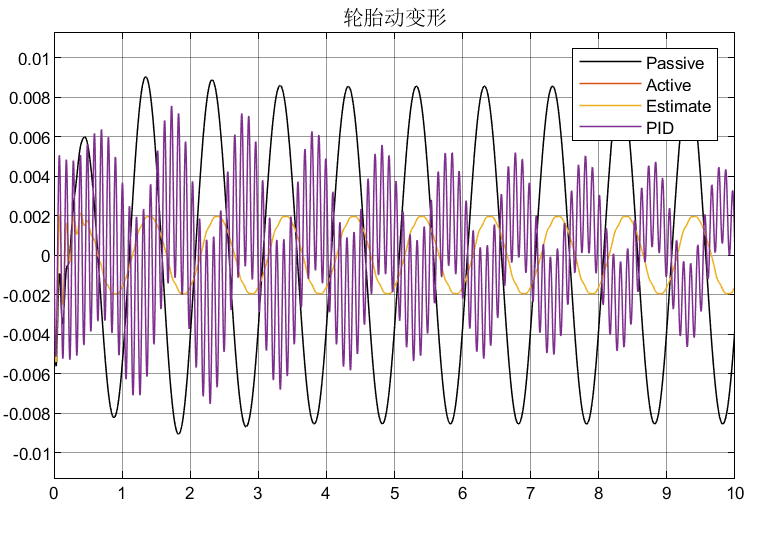
为了方便清晰对比仿真结果,这里以正弦路面作为激励,仿真结果如下:
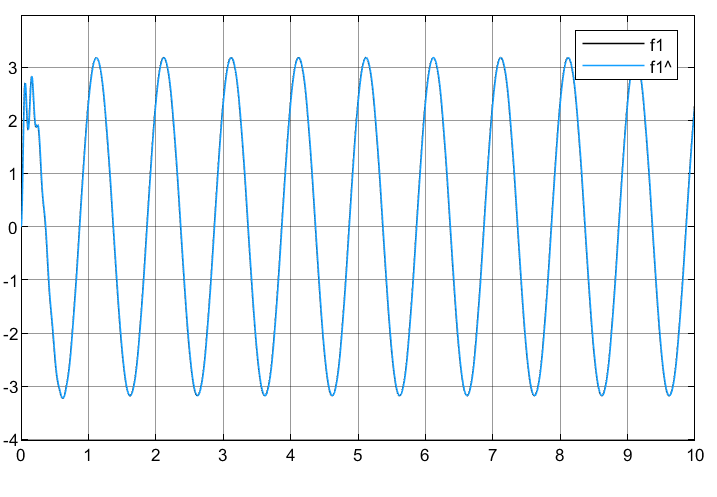
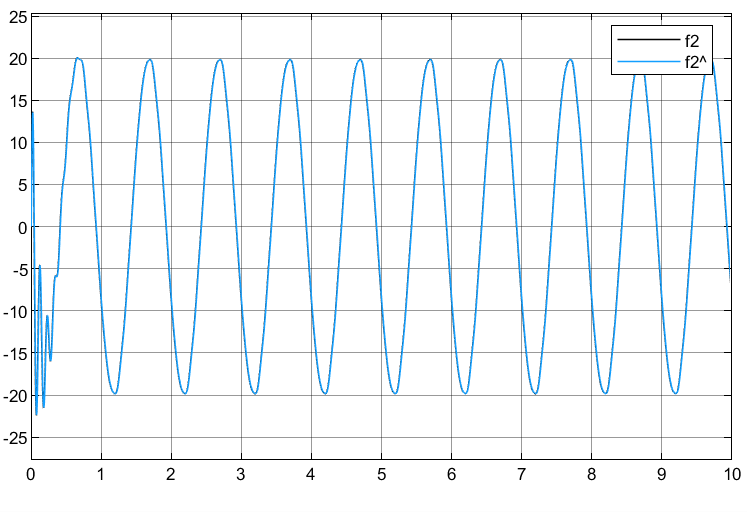
3.1 性能指标和观测效果对比
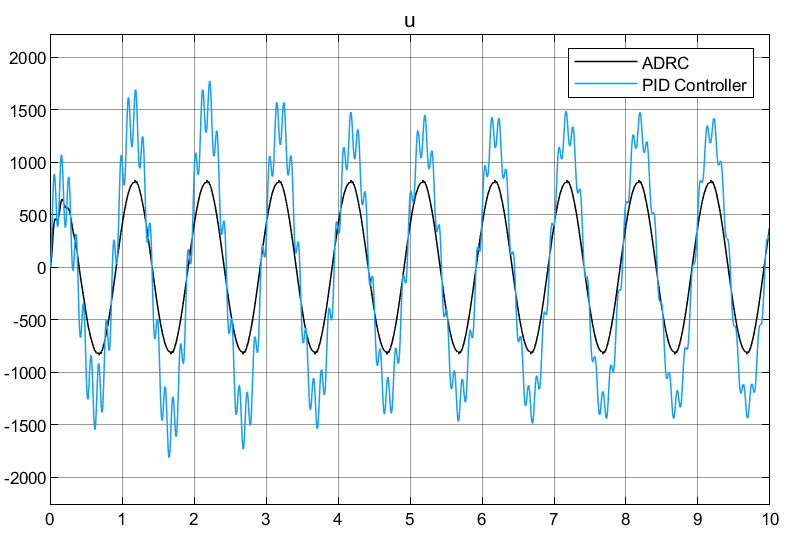
3.2控制输入对比
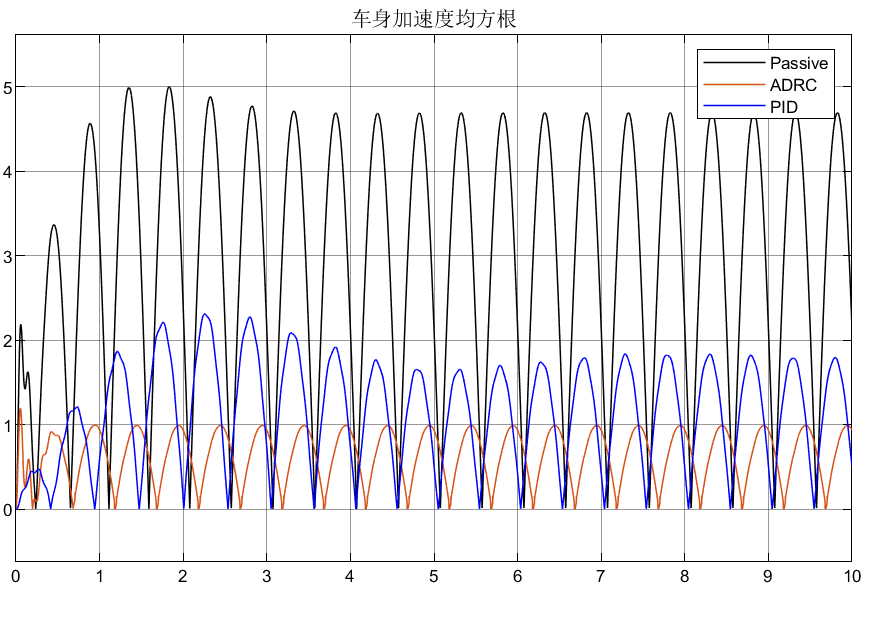
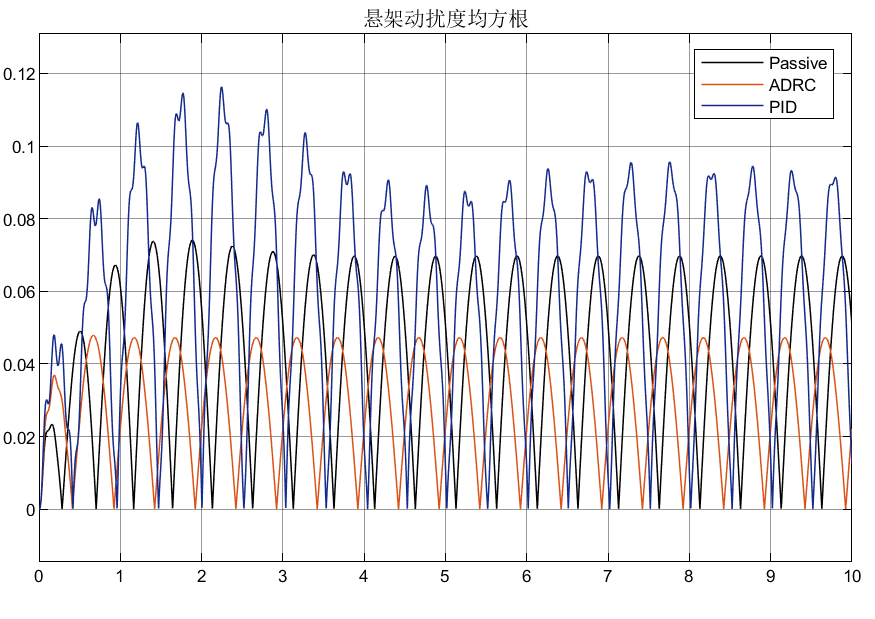
3.3 性能指标均方根对比
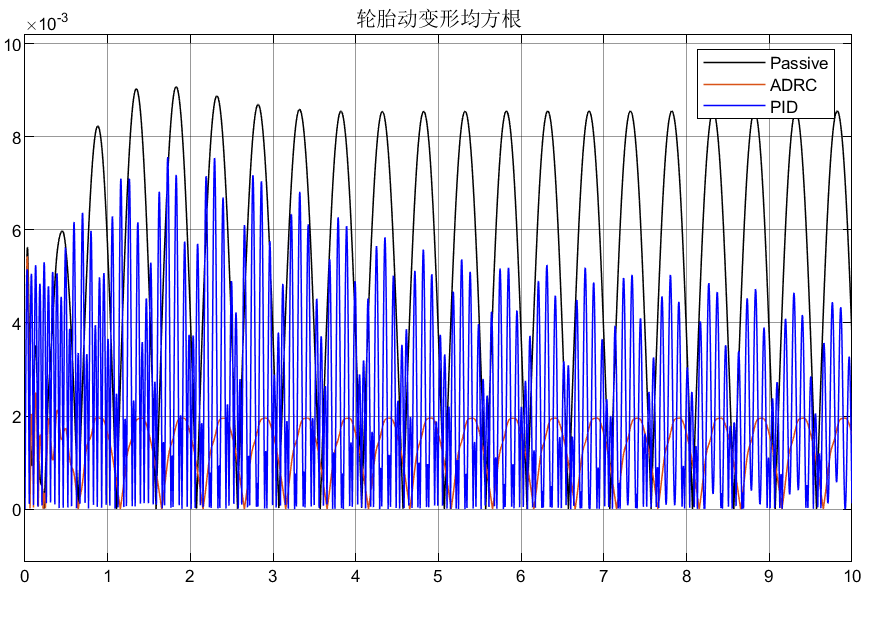
4.总结
可以看到,在相同调节参数下ADRC的控制效果要好于传统的PID控制,并且可以很好的改善微分后的抖动,以及比例过大的超调现象。