1. 功能说明
本实验要实现的功能是:将黑、白两种颜色的工件分别放置在传感器上时,机械臂会根据检测到的颜色,将工件搬运至写有相应颜色字样区域。
2. 使用样机
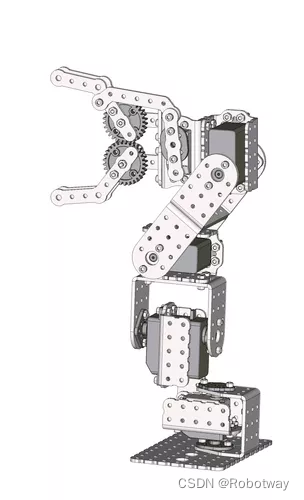
本实验使用的样机为4自由度串联机械臂。
3. 运动功能实现
3.1 电子硬件
在这个示例中,我们采用了以下硬件,请大家参考:
| 主控板 | Basra(兼容Arduino Uno) |
| 扩展板 | Bigfish2.1 |
| 传感器 | TCS3200颜色识别 |
| 电池 | 7.4V锂电池 |
在4自由度串联机械臂底座上安装一个 TCS3200颜色识别传感器 ,用于检测工件的RGB值。
3.2 编写程序
编程环境:Arduino 1.8.19
可以事先利用TCS3200颜色识别传感器检测一下两个工件的的颜色数据,根据颜色数据的特征来确定判断语句的写法,尽量利用R、G、B数值中差别最大的那个作为区分颜色的主要依据。TCS3200颜色识别传感器的检测方法可以参考 TCS3200颜色识别传感器 。
编写并烧录以下程序(Color_test.ino),该程序将实现演示视频中的动作。
/*------------------------------------------------------------------------------------
版权说明:Copyright 2023 Robottime(Beijing) Technology Co., Ltd. All Rights Reserved.
Distributed under MIT license.See file LICENSE for detail or copy at
https://opensource.org/licenses/MIT
by 机器谱 2023-02-03 https://www.robotway.com/
------------------------------
实验接线:舵机接口依次D4、D7、D11、D3、D8; 颜色传感器接在A0、A2、A3口上
------------------------------------------------------------------------------------*/
/*I will sorting black and white things according to the color_test Code.
Put the black things in the left.Put the white thing int the right*/
#include <MsTimer2.h>
//把TCS3200颜色传感器各控制引脚连到Arduino数字端口
#define S0 A0 //物体表面的反射光越强,TCS3002D的内置振荡器产生的方波频率越高,
#define S1 A1 //S0和S1的组合决定输出信号频率比率因子,,比例因子为2%
//比率因子为TCS3200传感器OUT引脚输出信号频率与其内置振荡器频率之比
#define S2 A2 //S2和S3的组合决定让红、绿、蓝,哪种光线通过滤波器
#define S3 0
#define OUT 2 //TCS3200颜色传感器输出信号输入到Arduino中断0引脚,并引发脉冲信号中断
//在中断函数中记录TCS3200输出信号的脉冲个数
#define LED A3 //控制TCS3200颜色传感器是否点亮
int g_count = 0; // 计算与反射光强相对应TCS3200颜色传感器输出信号的脉冲数
// 数组存储在1s内TCS3200输出信号的脉冲数,它乘以RGB比例因子就是RGB标准值
int g_array[3];
int g_flag = 0; //滤波器模式选择顺序标志
float g_SF[3]; // 存储从TCS3200输出信号的脉冲数转换为RGB标准值的RGB比例因子
int color=0;
// 初始化TSC3200各控制引脚的输入输出模式
//设置TCS3002D的内置振荡器方波频率与其输出信号频率的比例因子为2%
int a=0,b=0,c=0,d=0,e=0,f=0;
#include <Servo.h>
Servo servo_pin_4;
Servo servo_pin_7;
Servo servo_pin_11;
Servo servo_pin_3;
Servo servo_pin_8;
void TSC_Init()
{
pinMode(S0, OUTPUT);
pinMode(S1, OUTPUT);
pinMode(S2, OUTPUT);
pinMode(S3, OUTPUT);
pinMode(OUT, INPUT);
pinMode(LED, OUTPUT);
digitalWrite(S0, LOW);
digitalWrite(S1, HIGH);
}
//选择滤波器模式,决定让红、绿、蓝,哪种光线通过滤波器
void TSC_FilterColor(int Level01, int Level02)
{
if(Level01 != 0)
Level01 = HIGH;
if(Level02 != 0)
Level02 = HIGH;
digitalWrite(S2, Level01);
digitalWrite(S3, Level02);
}
//中断函数,计算TCS3200输出信号的脉冲数
void TSC_Count()
{
g_count ++ ;
}
//定时器中断函数,每1s中断后,把该时间内的红、绿、蓝三种光线通过滤波器时,
//TCS3200输出信号脉冲个数分别存储到数组g_array[3]的相应元素变量中
void TSC_Callback()
{
switch(g_flag)
{
case 0:
Serial.println("->WB Start");
TSC_WB(LOW, LOW); //选择让红色光线通过滤波器的模式
break;
case 1:
Serial.print("->Frequency R=");
Serial.println(g_count); //打印1s内的红光通过滤波器时,TCS3200输出的脉冲个数
g_array[0] = g_count; //存储1s内的红光通过滤波器时,TCS3200输出的脉冲个数
TSC_WB(HIGH, HIGH); //选择让绿色光线通过滤波器的模式
break;
case 2:
Serial.print("->Frequency G=");
Serial.println(g_count); //打印1s内的绿光通过滤波器时,TCS3200输出的脉冲个数
g_array[1] = g_count; //存储1s内的绿光通过滤波器时,TCS3200输出的脉冲个数
TSC_WB(LOW, HIGH); //选择让蓝色光线通过滤波器的模式
break;
case 3:
Serial.print("->Frequency B=");
Serial.println(g_count); //打印1s内的蓝光通过滤波器时,TCS3200输出的脉冲个数
Serial.println("->WB End");
g_array[2] = g_count; //存储1s内的蓝光通过滤波器时,TCS3200输出的脉冲个数
TSC_WB(HIGH, LOW); //选择无滤波器的模式
break;
default:
g_count = 0; //计数值清零
break;
}
}
//设置反射光中红、绿、蓝三色光分别通过滤波器时如何处理数据的标志
//该函数被TSC_Callback( )调用
void TSC_WB(int Level0, int Level1)
{
g_count = 0; //计数值清零
g_flag ++; //输出信号计数标志
TSC_FilterColor(Level0, Level1); //滤波器模式
// Timer2.setPeriod(100000); //设置输出信号脉冲计数时长1s
}
//初始化
void grab_put_left()
{ for(e=70;e>=50;e-=1)
{servo_pin_8.write(e);delay(30);}
for(d=158;d>=36;d-=3)
{servo_pin_3.write(d);delay(30);}
for(c=68;c<142;c+=3)
{servo_pin_11.write(c);delay(30);}
for(e=50;e<=70;e+=1)
{servo_pin_8.write(e);delay(30);}
for(c=142;c>=103;c-=3)
{servo_pin_11.write(c);delay(30);}
for(a=76;a<=120;a+=3)
{servo_pin_4.write(a); delay(30);}
for(e=70;e>=50;e-=1)
{servo_pin_8.write(e);delay(30);}
for(a=120;a>=76;a-=3)
{servo_pin_4.write(a); delay(30);}
for(c=103;c>=68;c-=3)
{servo_pin_11.write(c);delay(30);}
for(d=36;d<=157;d+=3)
{servo_pin_3.write(d);delay(30);}
for(e=50;e<=70;e+=1)
{servo_pin_8.write(e);delay(30);}
delay(1000);
}
void grab_put_right()
{ for(e=70;e>=50;e-=1)
{servo_pin_8.write(e);delay(30);}
for(d=158;d>=36;d-=3)
{servo_pin_3.write(d);delay(30);}
for(c=68;c<142;c+=3)
{servo_pin_11.write(c);delay(30);}
for(e=50;e<=70;e+=1)
{servo_pin_8.write(e);delay(30);}
for(c=142;c>=103;c-=3)
{servo_pin_11.write(c);delay(30);}
for(a=76;a>=32;a-=3)
{servo_pin_4.write(a); delay(30);}
for(e=70;e>=50;e-=1)
{servo_pin_8.write(e);delay(30);}
for(a=32;a<=76;a+=3)
{servo_pin_4.write(a); delay(30);}
for(c=103;c>=68;c-=3)
{servo_pin_11.write(c);delay(30);}
for(d=36;d<=157;d+=3)
{servo_pin_3.write(d);delay(30);}
for(e=50;e<=70;e+=1)
{servo_pin_8.write(e);delay(30);}
delay(1000);
}
void setup()
{servo_pin_4.attach(4);
servo_pin_4.write( 76);
servo_pin_7.attach(7);
servo_pin_7.write( 110);
servo_pin_11.attach(11);
servo_pin_11.write(68);
servo_pin_3.attach(3);
servo_pin_3.write(157);
servo_pin_8.attach(8);
servo_pin_8.write(71);
delay(3000);//set up the initial posotion.Each servo is different,
// so u must use Software of Processing to monitor your initial positions of servo.
TSC_Init();
Serial.begin(9600); //启动串行通信
MsTimer2::set(2000,TSC_Callback); // 500ms period
MsTimer2::start();
// Timer1.initialize(); // defaulte is 1s
// Timer1.attachInterrupt(TSC_Callback); //设置定时器1的中断,中断调用函数为TSC_Callback()
//设置TCS3200输出信号的上跳沿触发中断,中断调用函数为TSC_Count()
attachInterrupt(0, TSC_Count,CHANGE);
digitalWrite(LED, HIGH);//点亮LED灯
delay(2000); //延时4s,以等待被测物体红、绿、蓝三色在1s内的TCS3200输出信号脉冲计数
//通过白平衡测试,计算得到白色物体RGB值255与1s内三色光脉冲数的RGB比例因子
g_SF[0] =0.04800;//255.0/ g_array[0]; //红色光比例因子
g_SF[1] =0.05065;// 255.0/ g_array[1] ; //绿色光比例因子
g_SF[2] =0.04104;// 255.0/ g_array[2] ; //蓝色光比例因子
//打印白平衡后的红、绿、蓝三色的RGB比例因子
Serial.println(g_SF[0],5);
Serial.println(g_SF[1],5);
Serial.println(g_SF[2],5);
//红、绿、蓝三色光对应的1s内TCS3200输出脉冲数乘以相应的比例因子就是RGB标准值
//打印被测物体的RGB值
for(int i=0; i<3; i++)
Serial.println(int(g_array[i] * g_SF[i]));
// int color=g_array[2] * g_SF[2];
}
//主程序
void loop()
{ int a=76;b=110;c=68;d=157;e=81;
servo_pin_4.write(a);
servo_pin_7.write(b);
servo_pin_11.write(c);
servo_pin_3.write(d);
servo_pin_8.write(e);
g_flag = 0;
//每获得一次被测物体RGB颜色值需时4s
// delay(4000);
//打印出被测物体RGB颜色值
for(int i=0; i<3; i++)
Serial.println(int(g_array[i] * g_SF[i]));
int color=g_array[2] * g_SF[2];
Serial.println(color);
if(color>100)
grab_put_right();
if(color<=100)
grab_put_left();
//delay(5000);
}4自由度串联机械臂按颜色分拣物品的详细资料请参考 4自由度串联机械臂