文章目录
- openpnp - configure - 主次基准点矫正
- 概述
- 备注
- END
openpnp - configure - 主次基准点矫正
概述
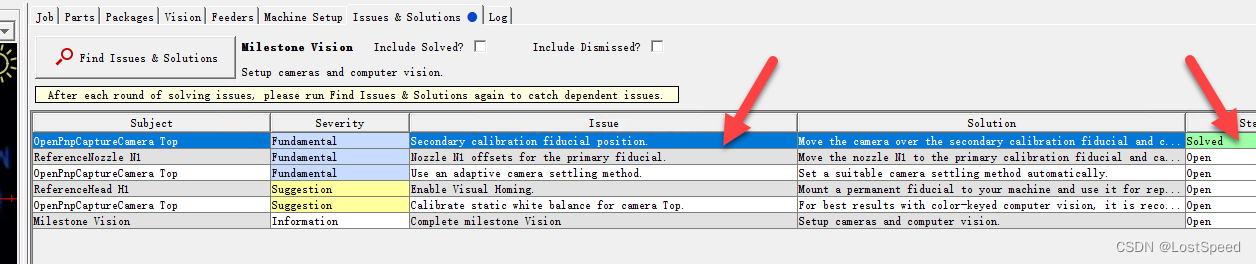
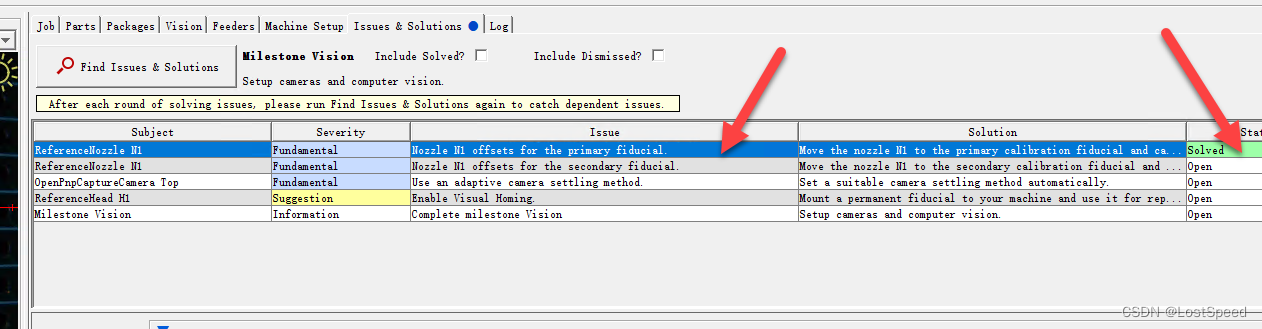
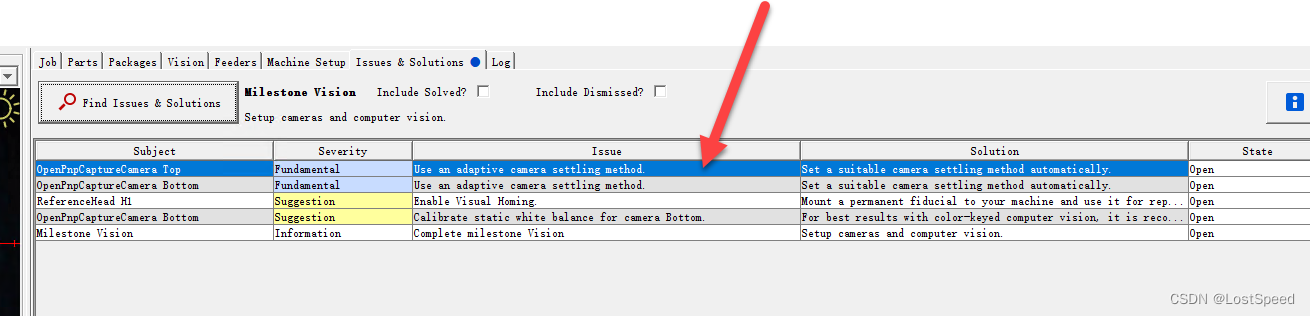
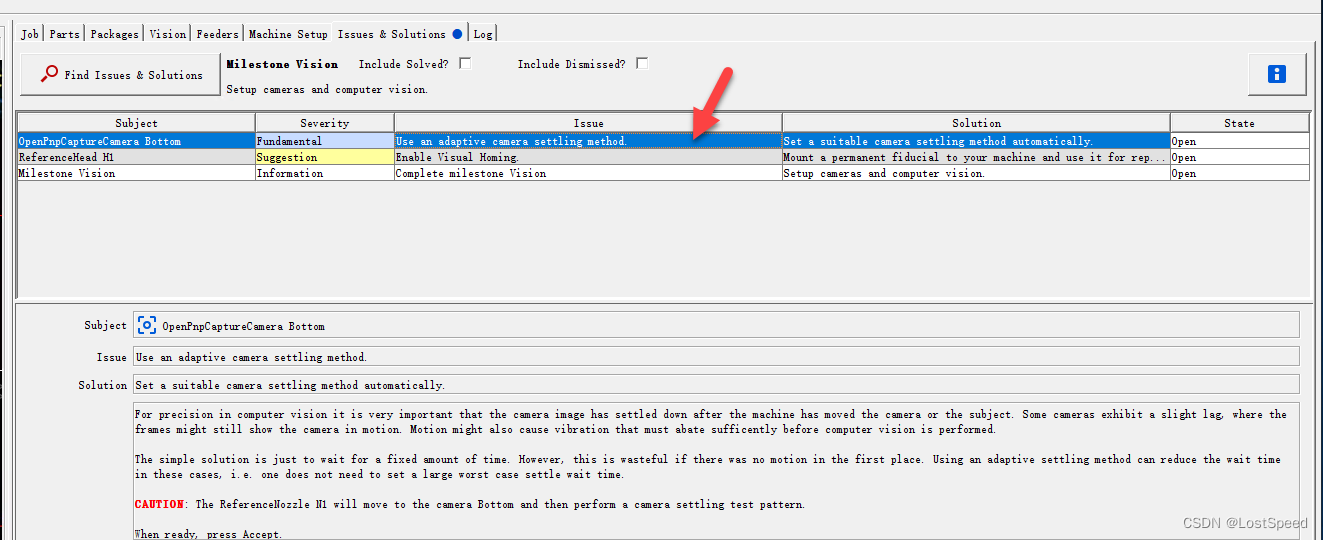
查找问题, 视觉里程碑只剩下4个问题了.

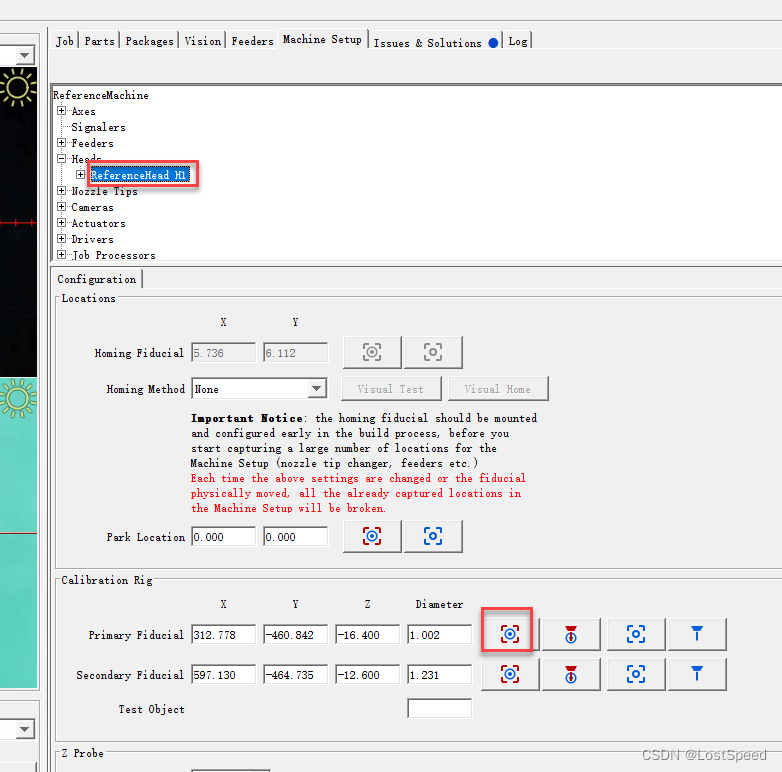
先看下设备上的主校准点, 我设备上的主校准点在设备前部的一个铝合金块上, 一块只带一个mark点的小PCB, 两边用螺丝拧住了.比PCB平面高了大约2mm不到.
校准的时候, 将速度降到50%, 要不手工移动吸头时太揪心.
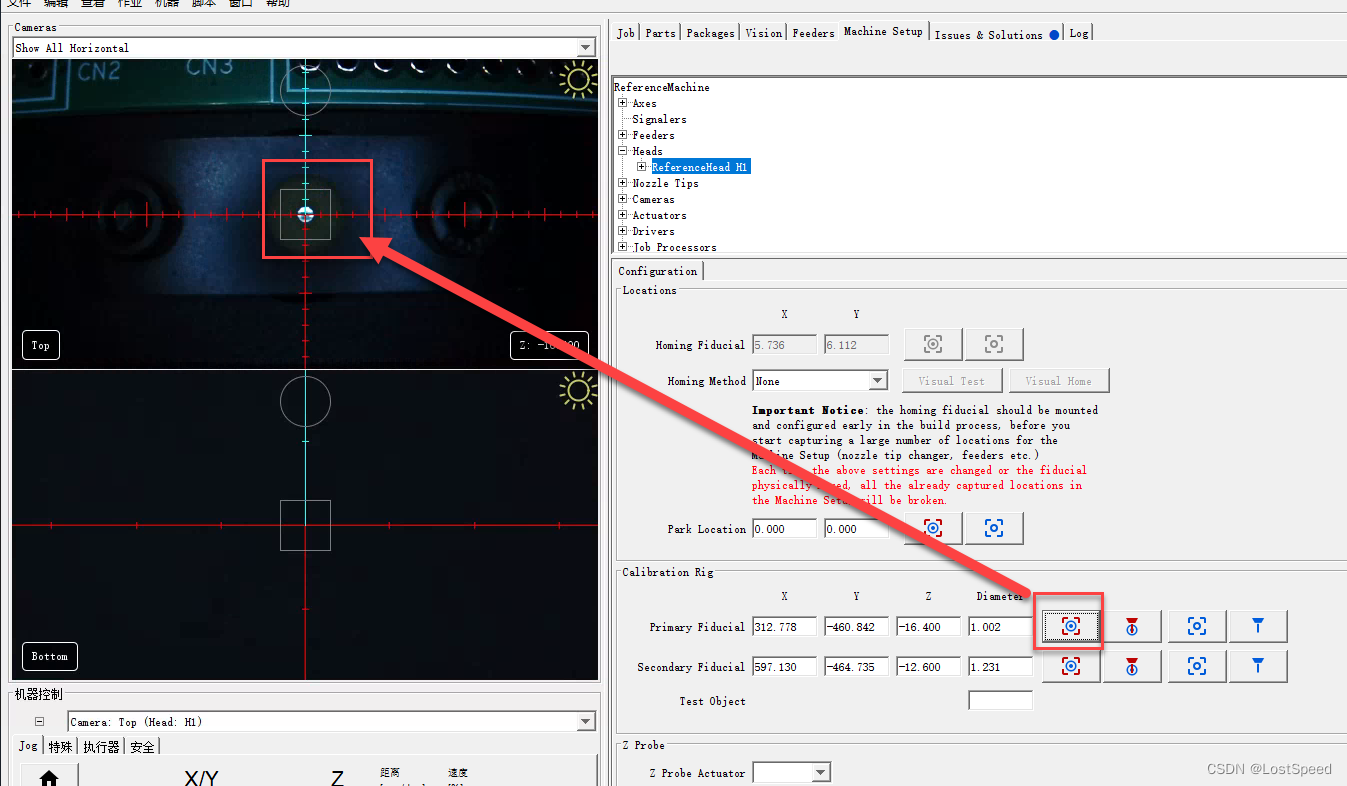
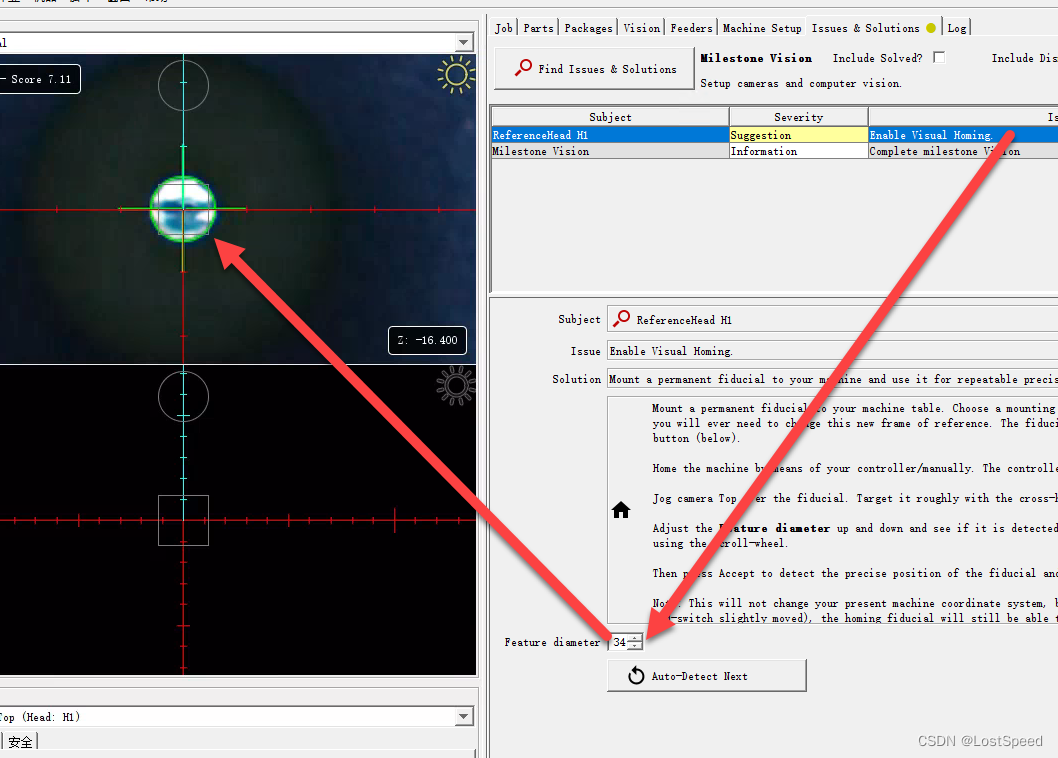
根据提示, 用JOG面板, 将顶部相机移动到主校准点中心. 将顶部相机灯光打开.
调整绿圈尺寸, 套住主校准点
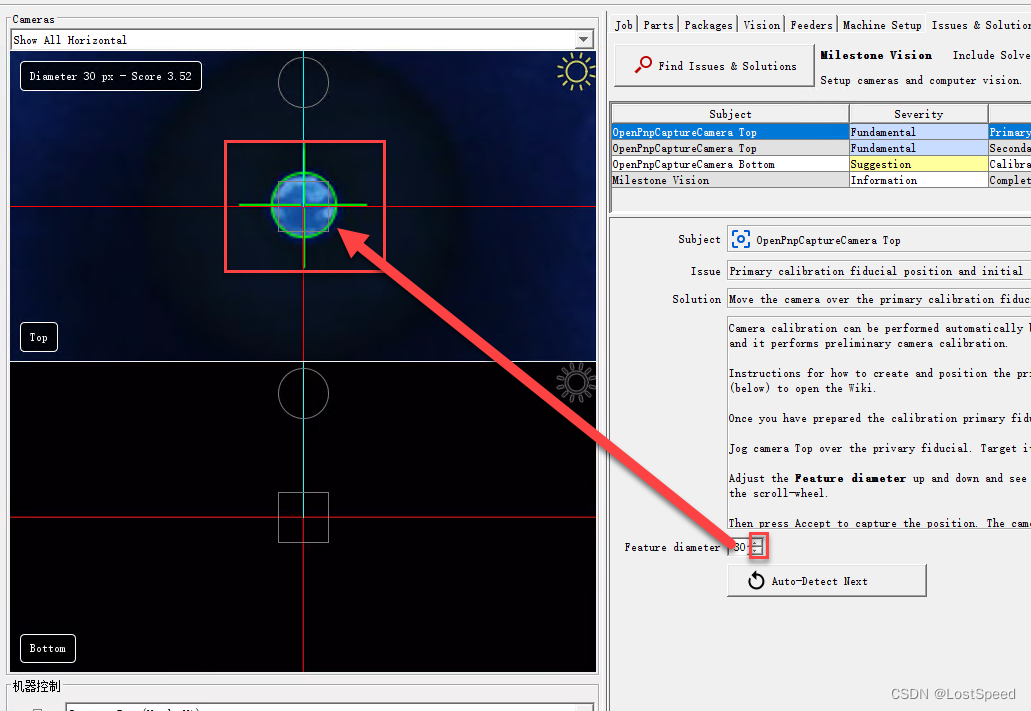
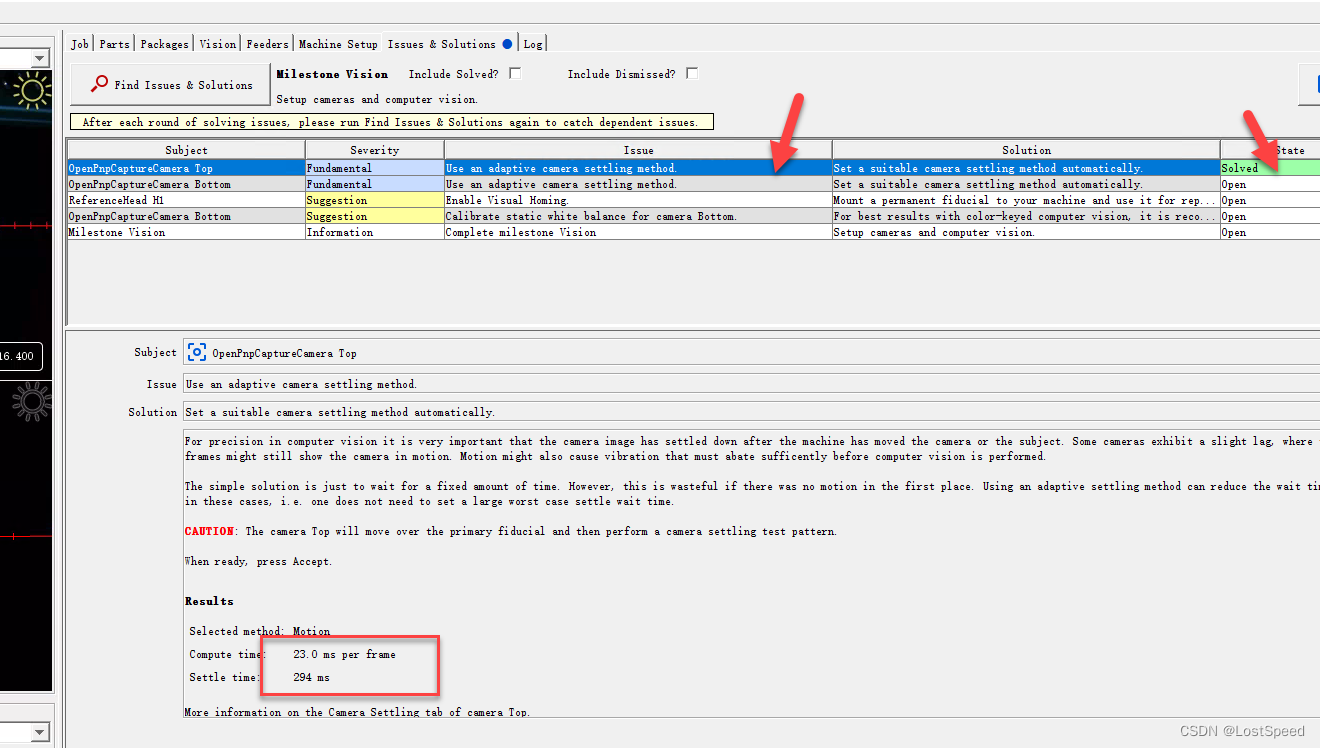
点击接受, 吸头开始围绕主校准点转圈, 直到问题解决, 大概几秒钟.
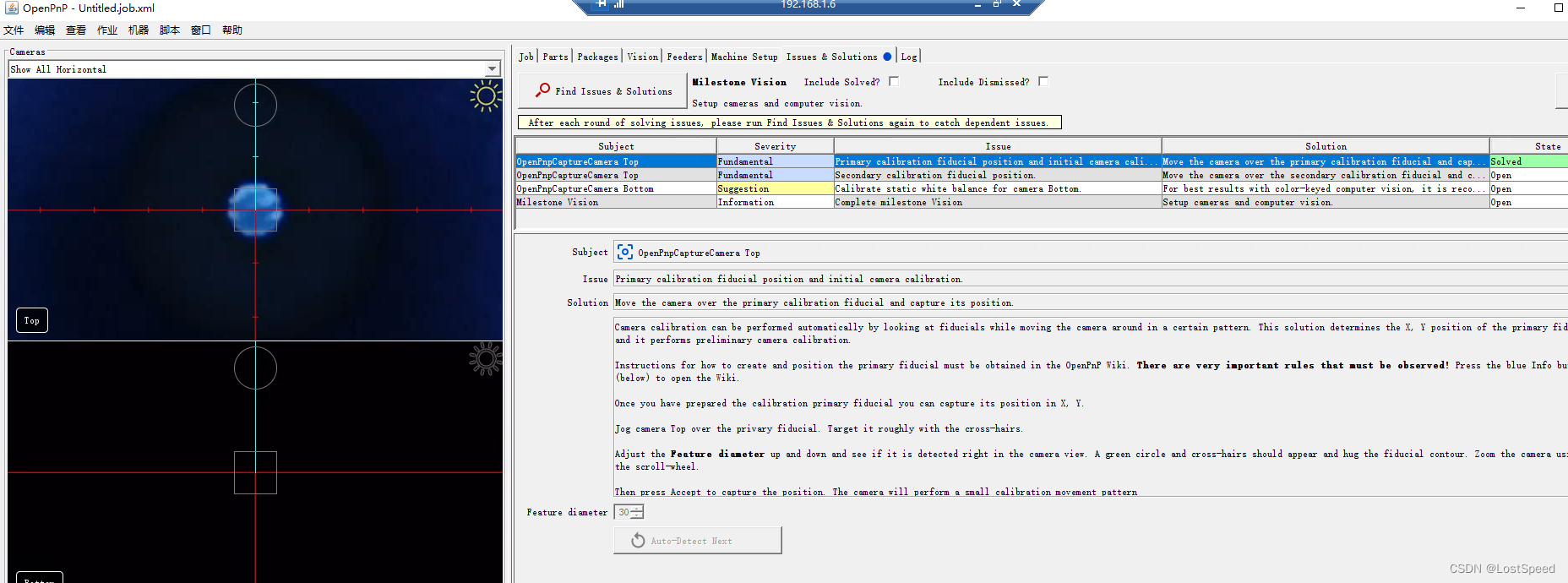
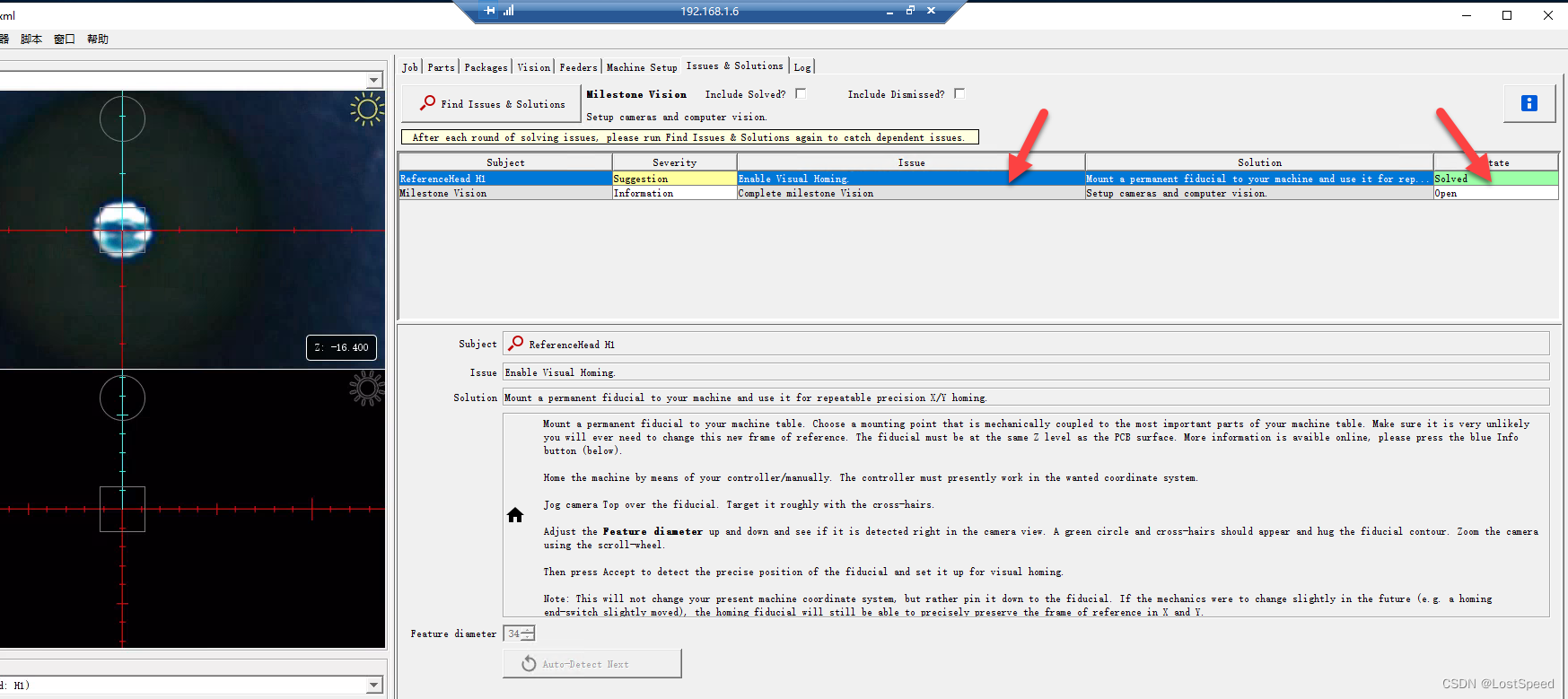
查找问题
现在该去矫正次校准点了.
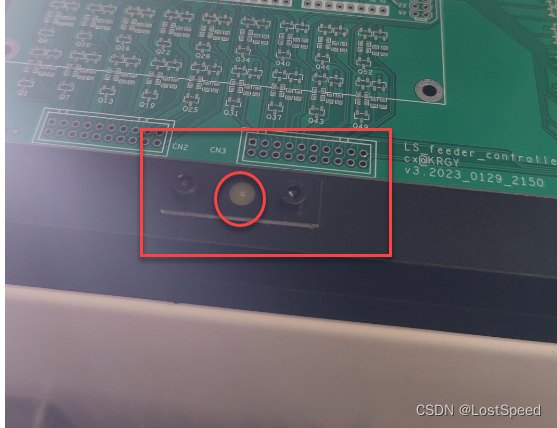
看下次校准点.

其实次校准点是不需要固定的. 但是我看到主,次校准点在配置中都是有记录的.
所以, 做了一块长条形的PCB, 上面有10个mark点, 随便用哪个mark点做次校准点都行. 然后将这个PCB拧到设备上.
如果以后设备搬运或颠簸后需要再次矫正, 就方便很多.
现在拿长条形PCB最左边的1mmMark点作为次校准点.
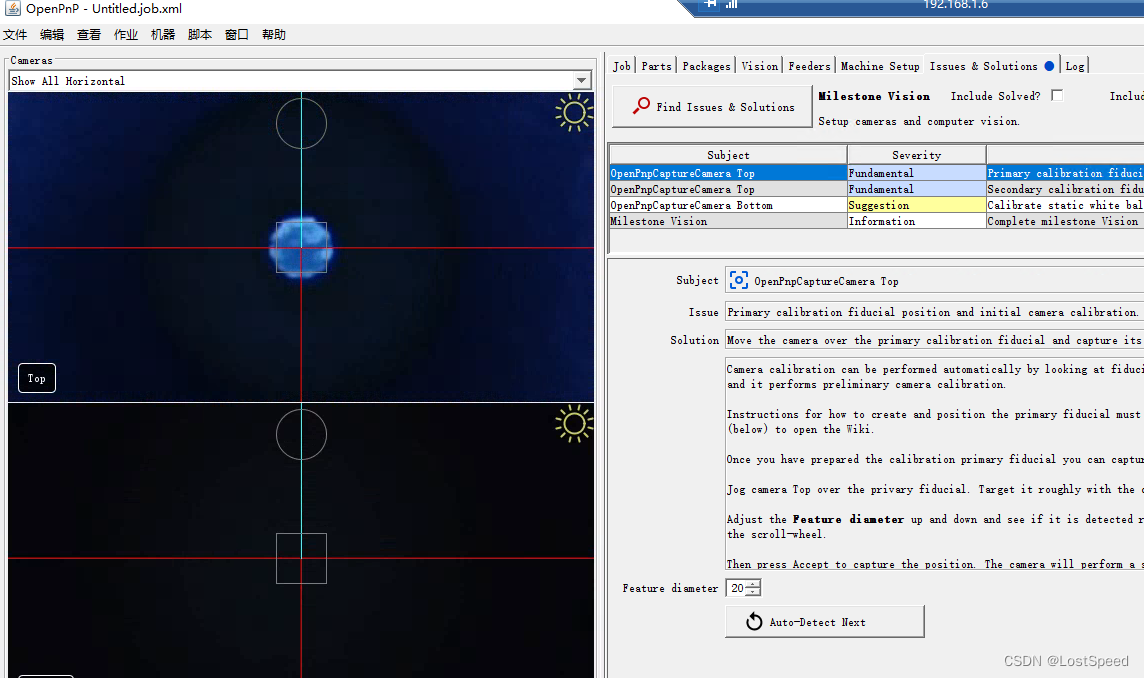
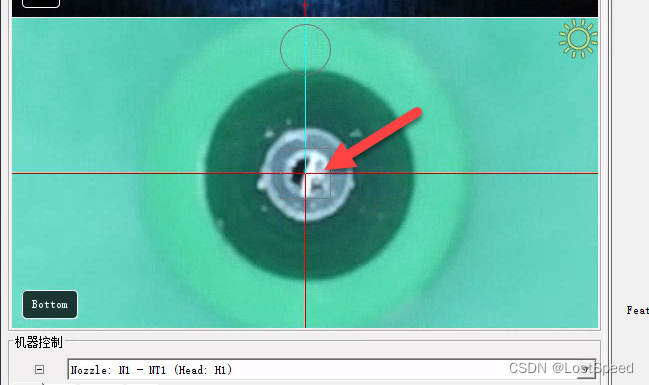
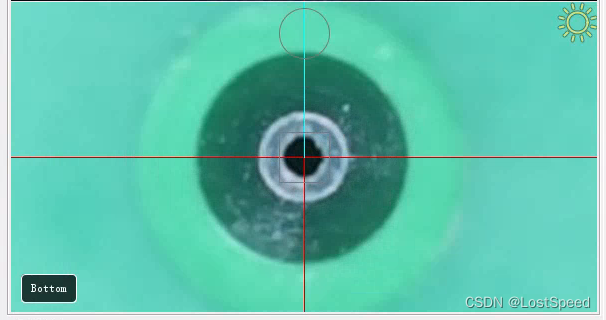
根据提示, 将顶部相机移动到此校准点中心.
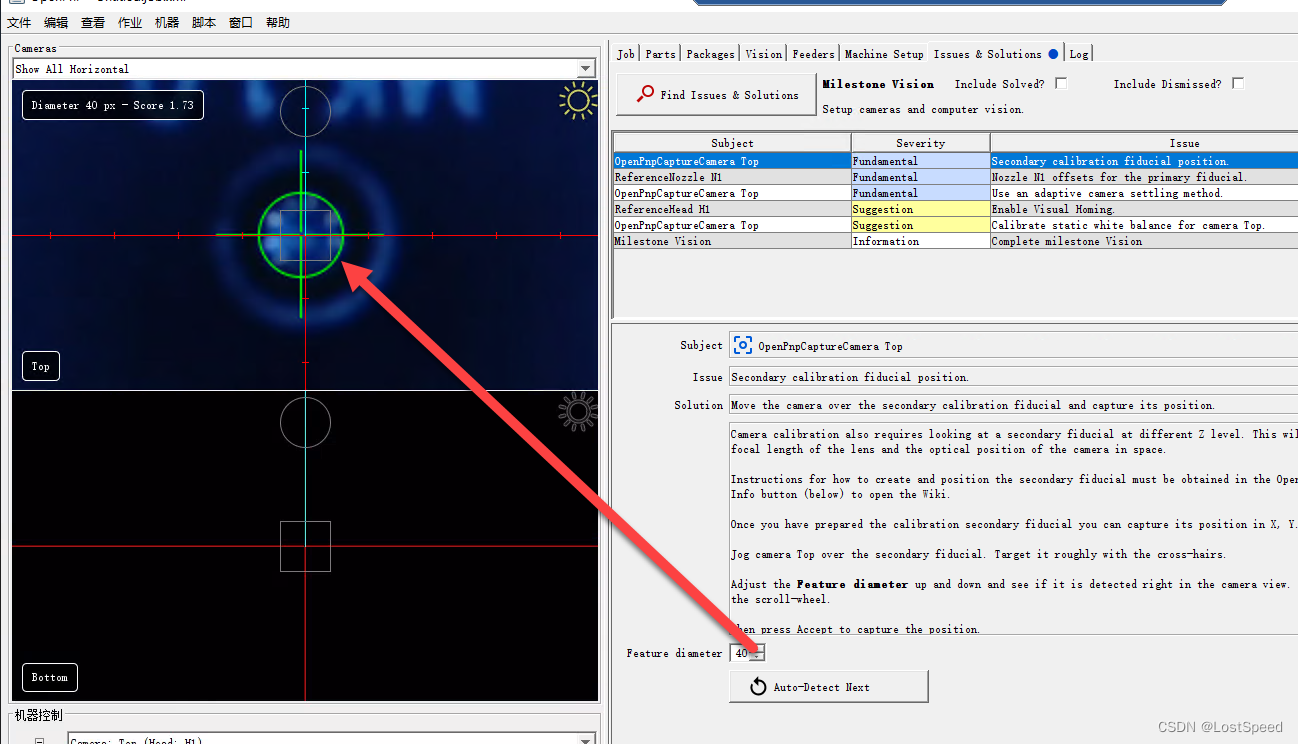
我做的这个PCB上的mark点, 在相机中有点模糊. 可能是相机没做白平衡矫正的原因.
先试试, 点击接受.
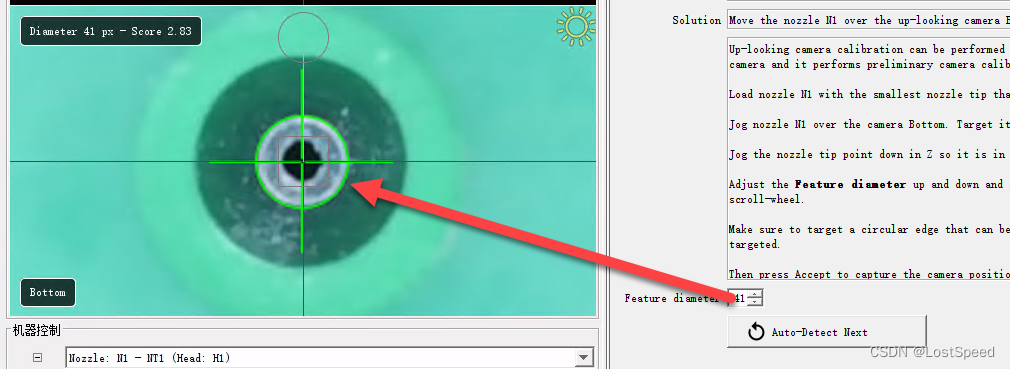
手工选择的这个绿框为40, 矫正失败.
然后用自动侦测, 发现绿圈选为了48, 再校正就成功了.
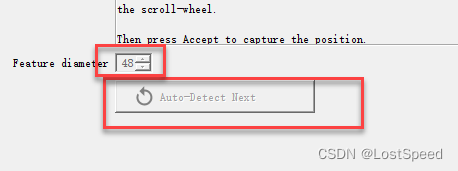
看来, 如果自己手工框的不好使, 就用自动侦测试试. 不过, 有时自动不好使, 找到的绿圈很大.
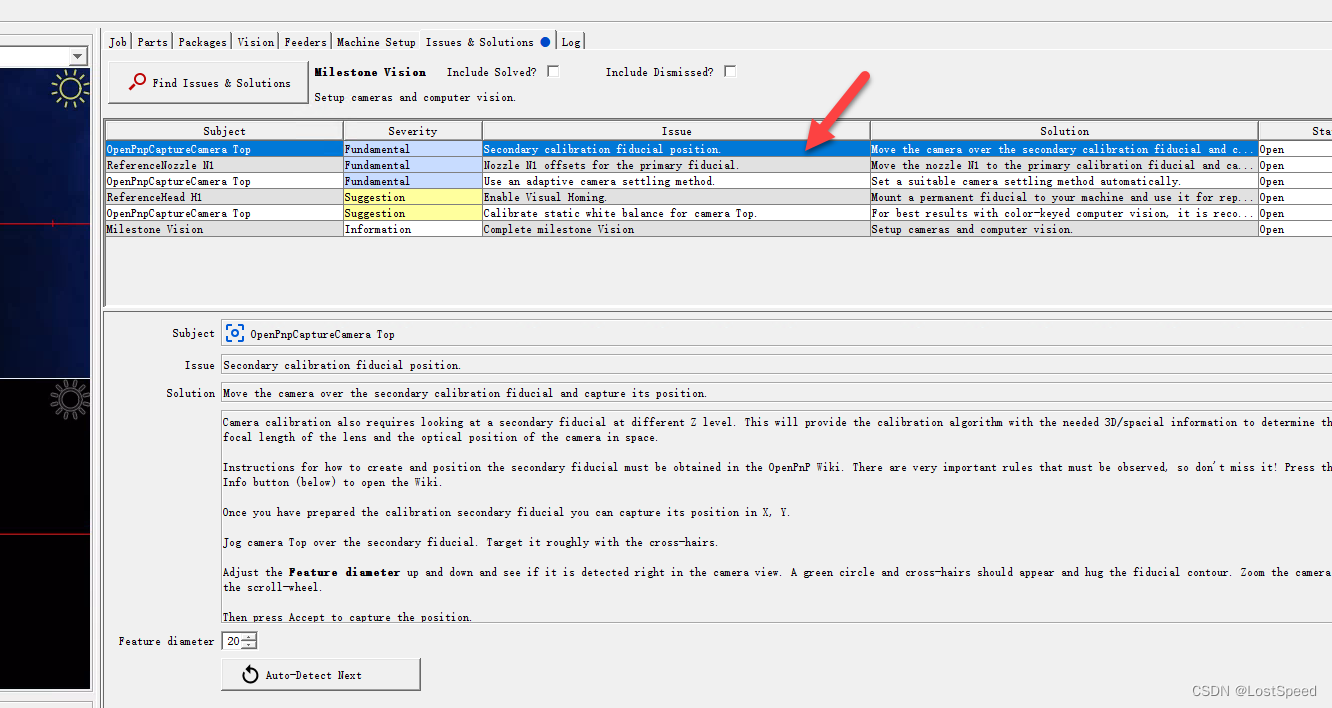
查找问题
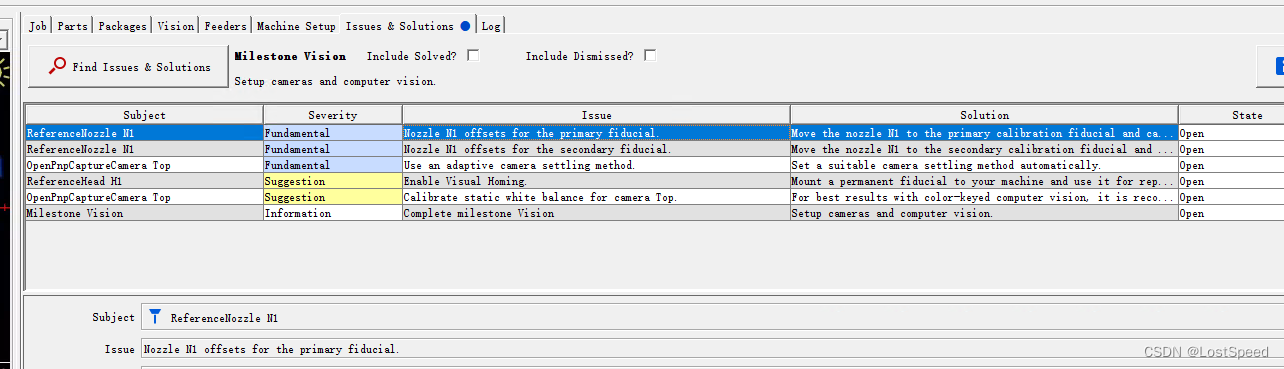
现在第一个基础问题:设置N1离主校准点的位置.
不过刚才已经看到此校准点在相机中看的不叫模糊, 现在建议级别中有顶部相机的白平衡, 先将这个做了.
现在相机正好就在此校准点中心, 正好看看矫正了白平衡, 对于相机效果是否有提高.
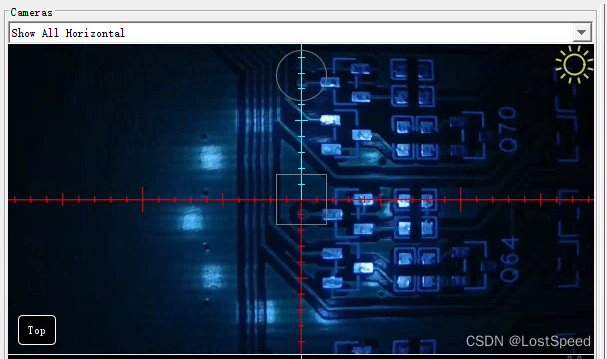
未作白平衡之前的顶部相机照射此校准点的效果如下:
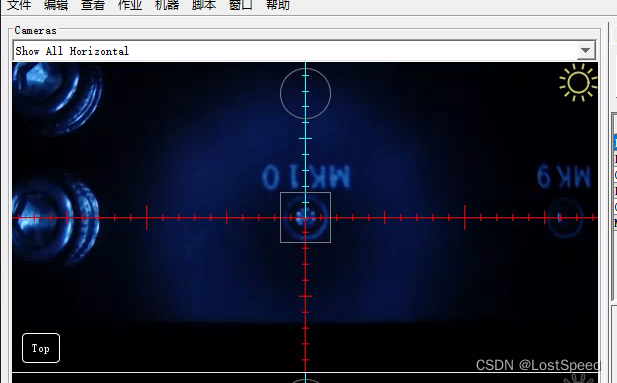
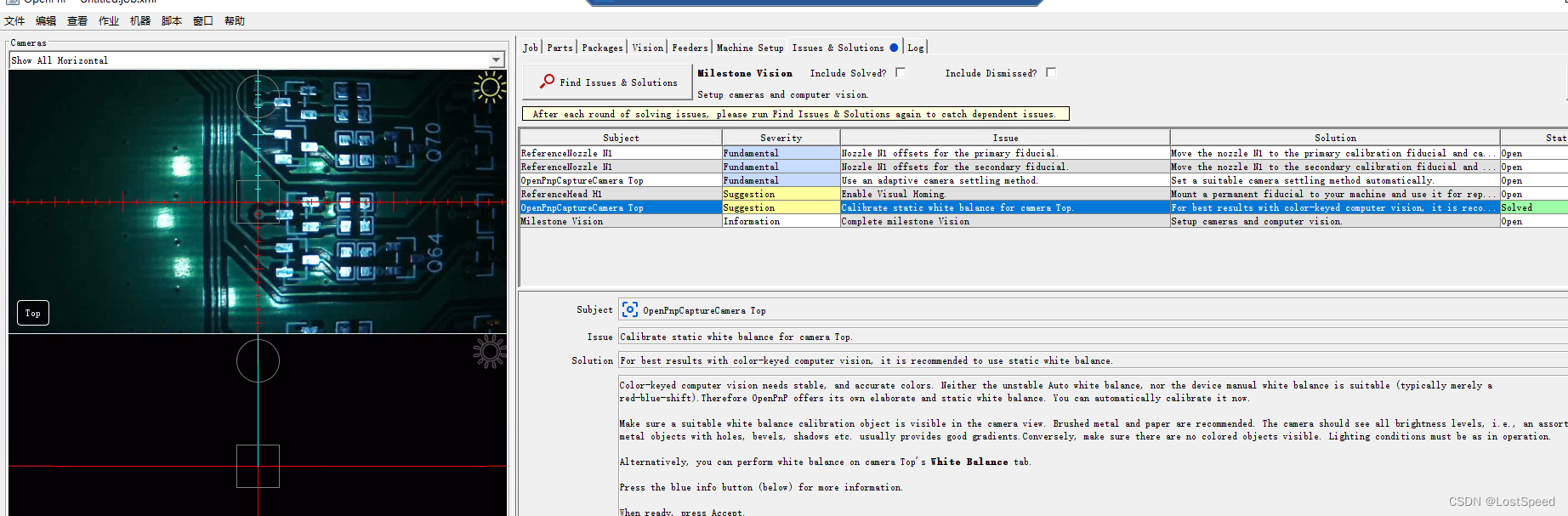
根据提示, 要将相机移动到PCB上方, 从相机中能看到所有元素(焊盘, PCB颜色, PCB走线, 过孔等等), 然后点击接受,就可以开始自动进行白平衡矫正.也可以去机器设置中的相机处, 自己做白平衡, 我们先用用自动矫正.
先移动到PCB上, 焊盘, 线, PCB颜色都看到了, 如下
在问题-白平衡矫正上点击接受
自动白平衡矫正后的效果如下, 效果还不错.
查找问题
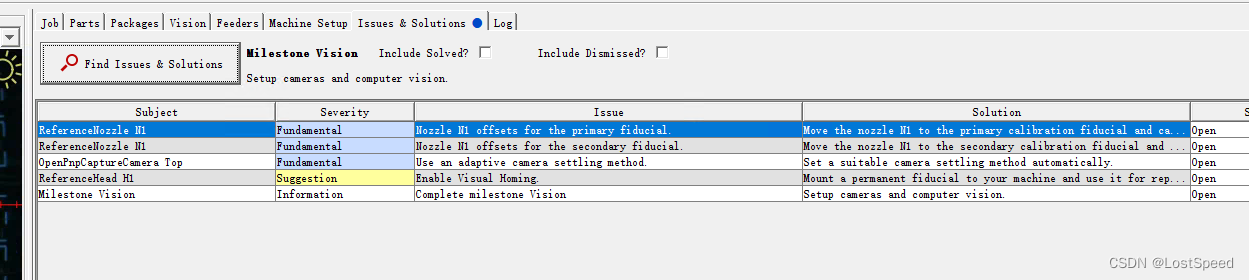
现在可以进行N1到主校准点距离的矫正了.
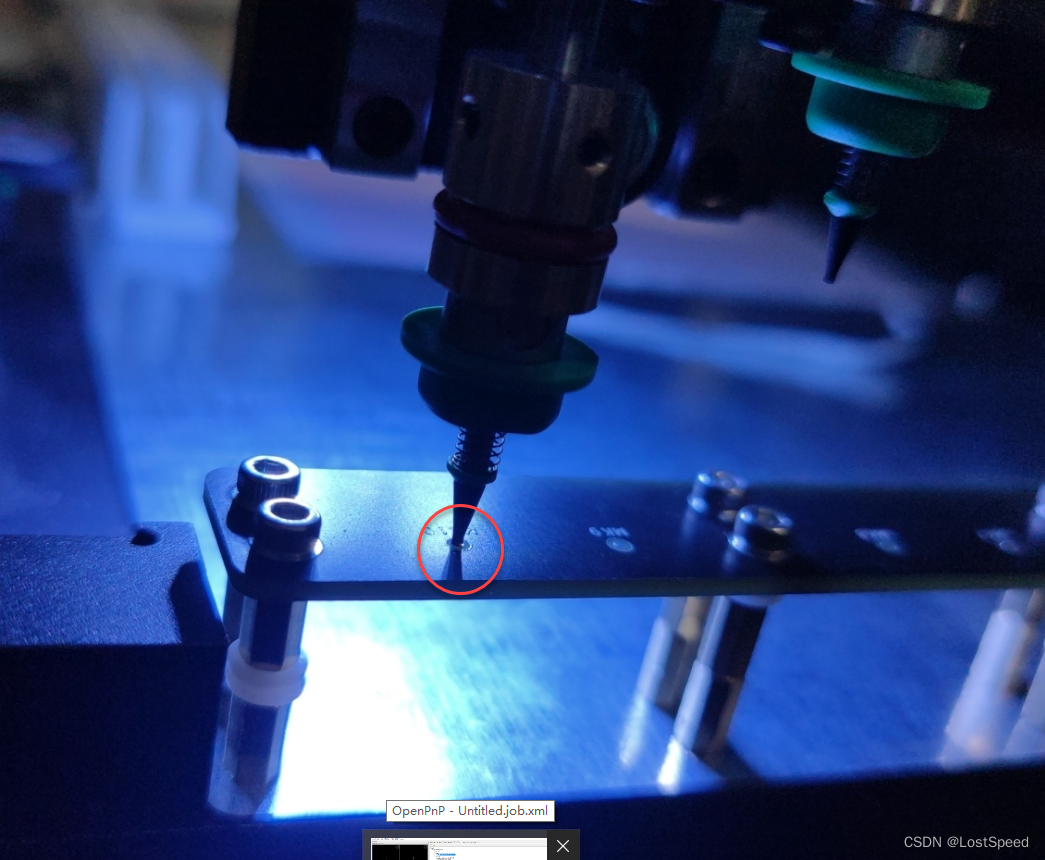
根据提示, 将N1上的吸嘴降到主校准点上(还是垫上小纸条, 来确定是否N1吸嘴接触到了主校准点), 如下:
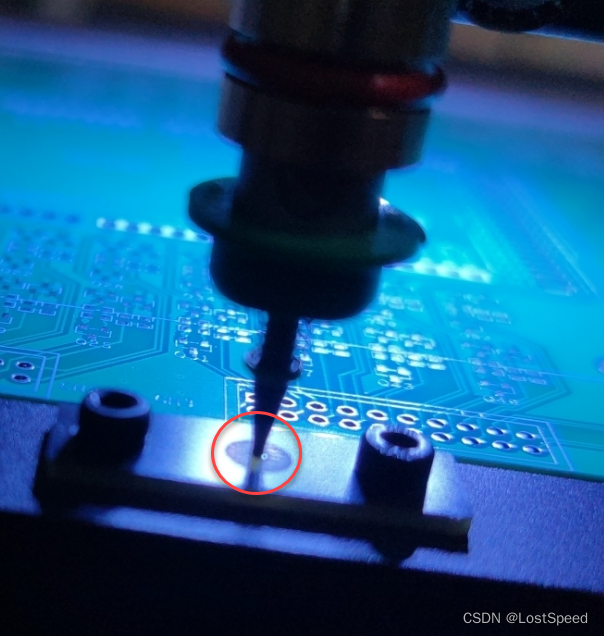
点击问题-测量N1和主校准点的偏移, 点击接受.
将Z回到安全高度.
移动N1吸嘴到次校准点上方, 降低N1吸嘴, 刚好和此校准点接触时停住, 如下:
次校准点高度是有要求的.
openpnp要求次校准点和主校准点至少要有2mm的高度差, 到底哪个比哪个高, 没有明确要求.
我的设备PCB是最低平面, 主校准点安装位置比PCB高出了2mm不到, 那我的次校准点, 就没法比PCB还低, 只能是比主校准点高.
手头没有合适的螺柱, 暂时从设备工作平面用螺柱垫起来(2个9mm高螺柱 + 3个1mm塑料垫片), 最终次基准点的PCB平面, 比主基准点高5mm不到. 等过几个月, 都用顺了, 再做个CNC的零件装上, 再像主基准点那样, 将次基准点的小PCB柠到CNC的零件上. 现在先这样.
如上图, 已经将N1吸嘴正好顶到了次基准点的mark点上, 现在问题N1到次基准点偏移上选择接受.
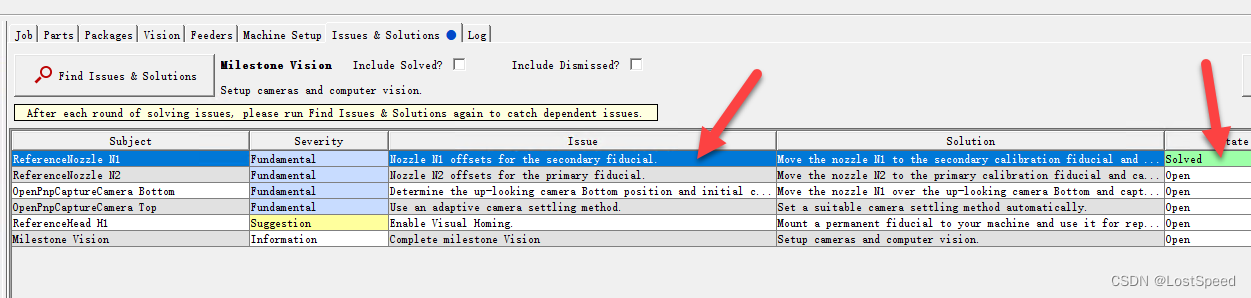
问题解决, 继续查找问题.
现在要矫正N2吸嘴到主校准点的偏移.
将Z回到安全距离, 在点击N2/主基准偏移问题时, 控制目标已经变到了N2.
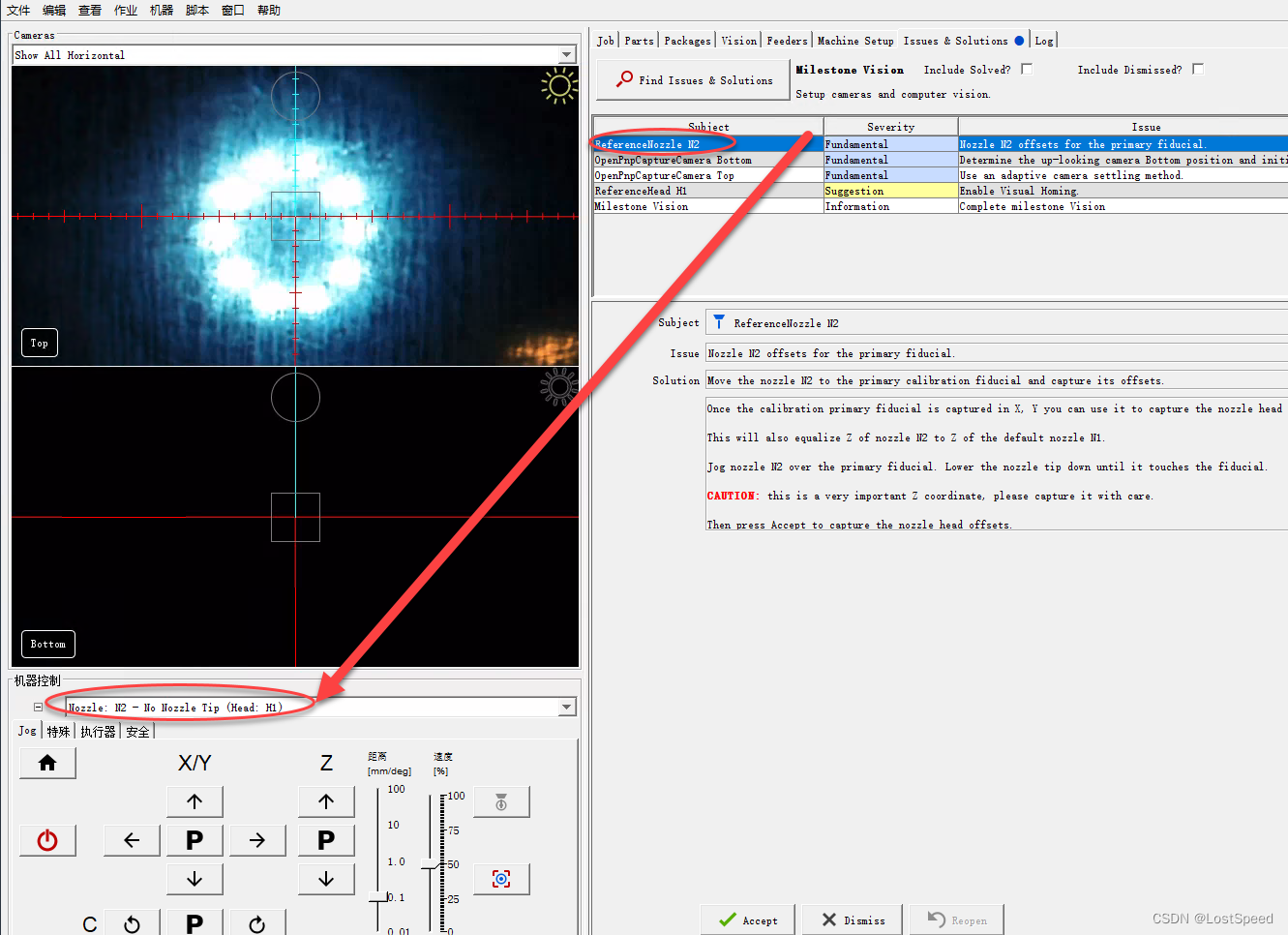
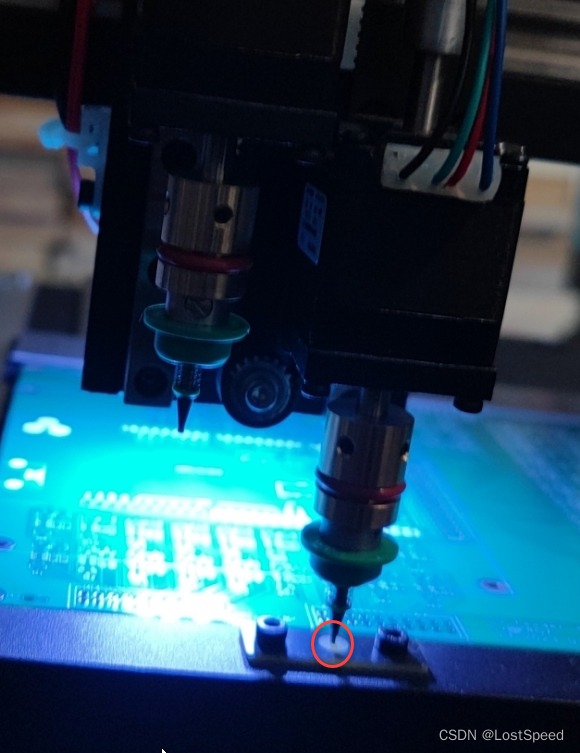
移动N2吸嘴, 到主校准点上方, 降下去, 正好压住主校准点, 如下:
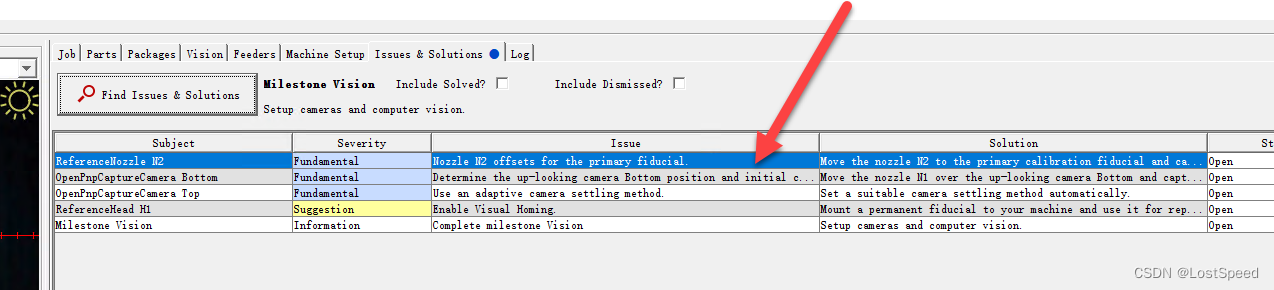
点击问题页面的接受按钮.问题解决, 将Z升到安全高度.
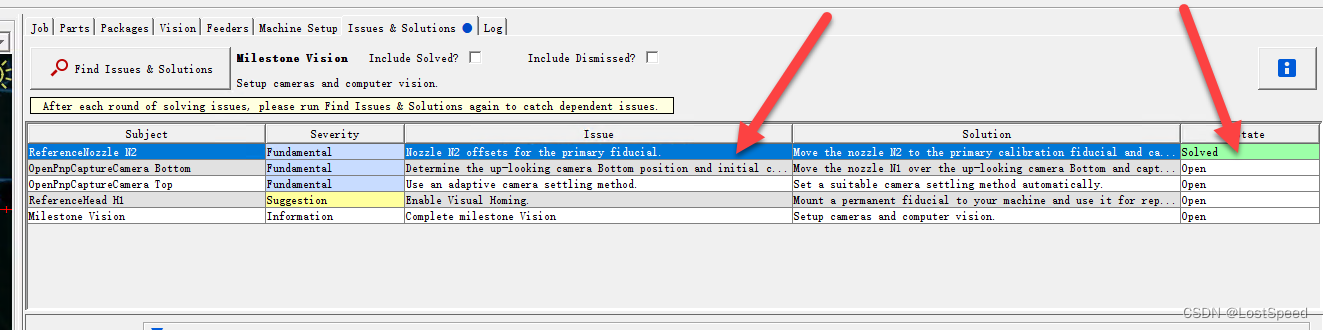
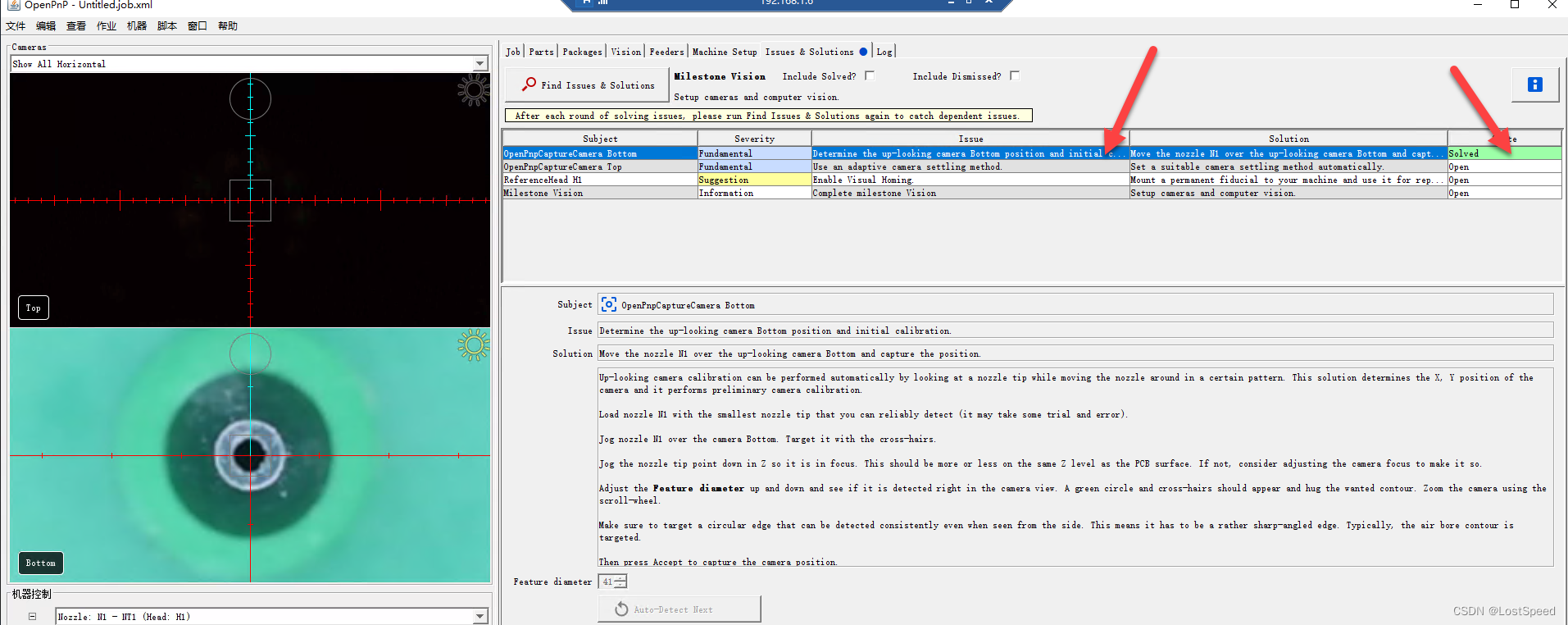
查找问题
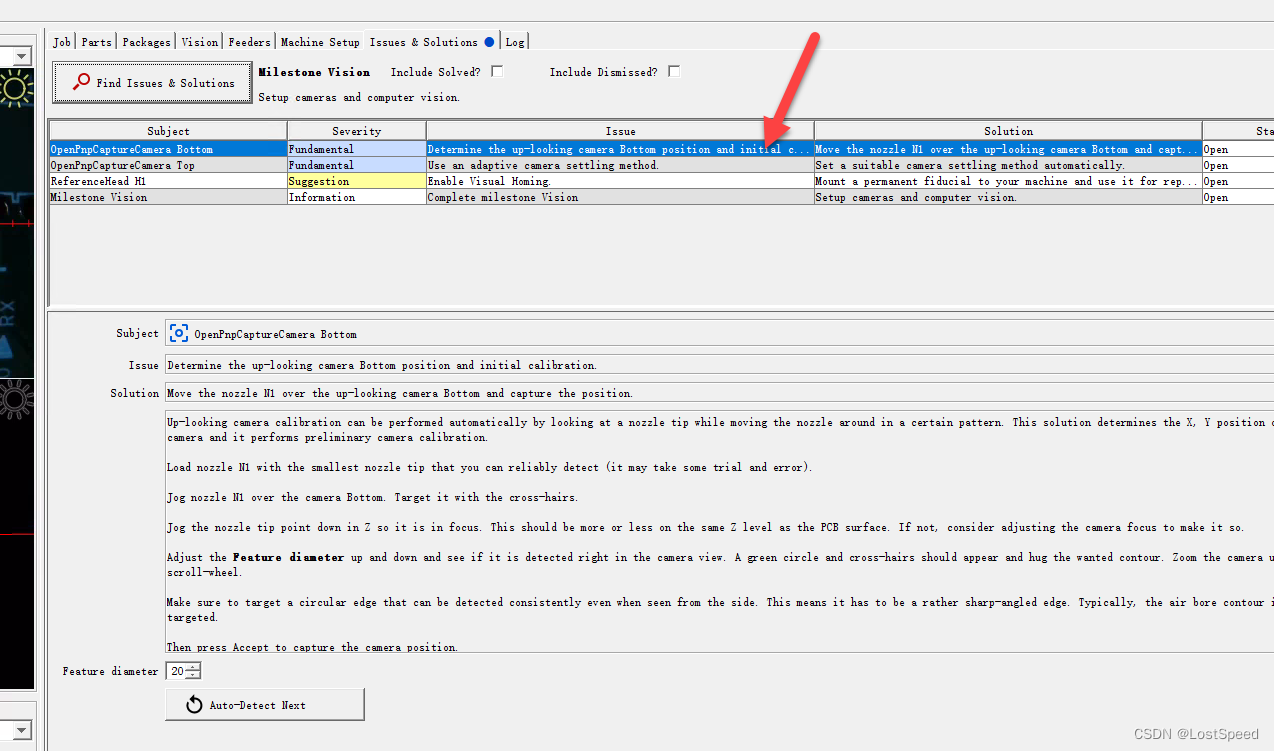
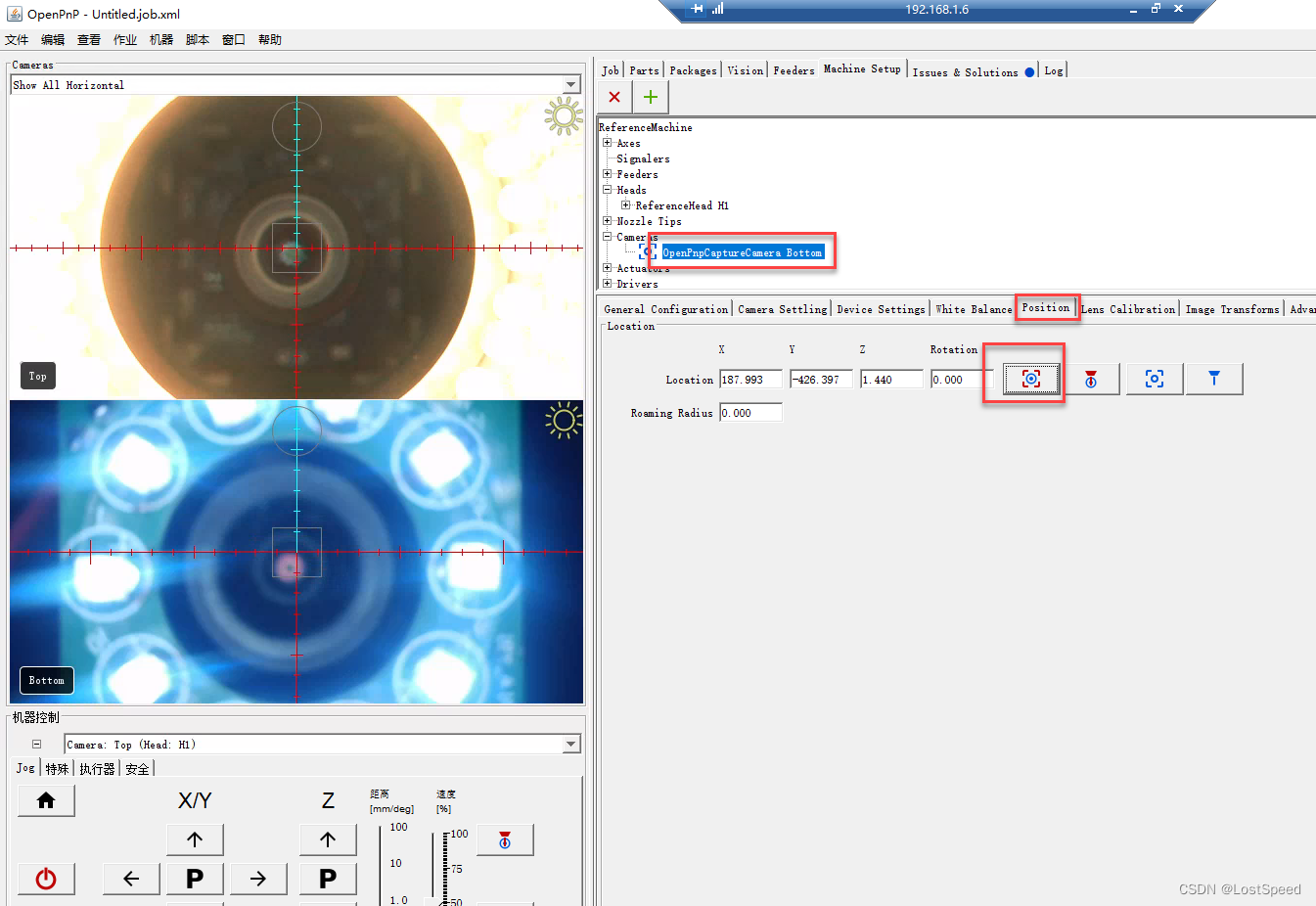
现在第一个基础问题是校验底部相机位置
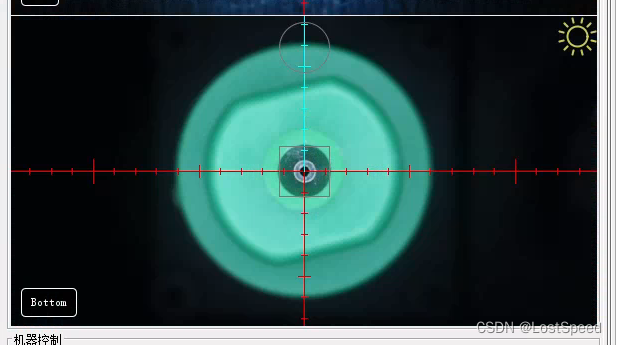
将N1吸嘴座移动到底部相机上, 将底部相机的十字线对准N1上的吸嘴.
现在能看到N1吸嘴上有点脏东西, 将吸嘴的内控挡住了. 找块镜头纸, 将N1吸嘴擦一下, 让吸嘴的内孔能看清才行.
拿镜头纸擦不好使, 好像内孔中有镜头纸的小碎碎.
最后拿AWG22的线弄散, 来通孔, 这才将白色的小碎碎弄掉.
但是看内控并不是园的, 那我们用绿圈框住吸嘴的外径好了.
在问题页面, 当前问题条目下, 点击接受.
看到底部相机在做矫正, 稍等一下, 直到矫正完成.
查找问题
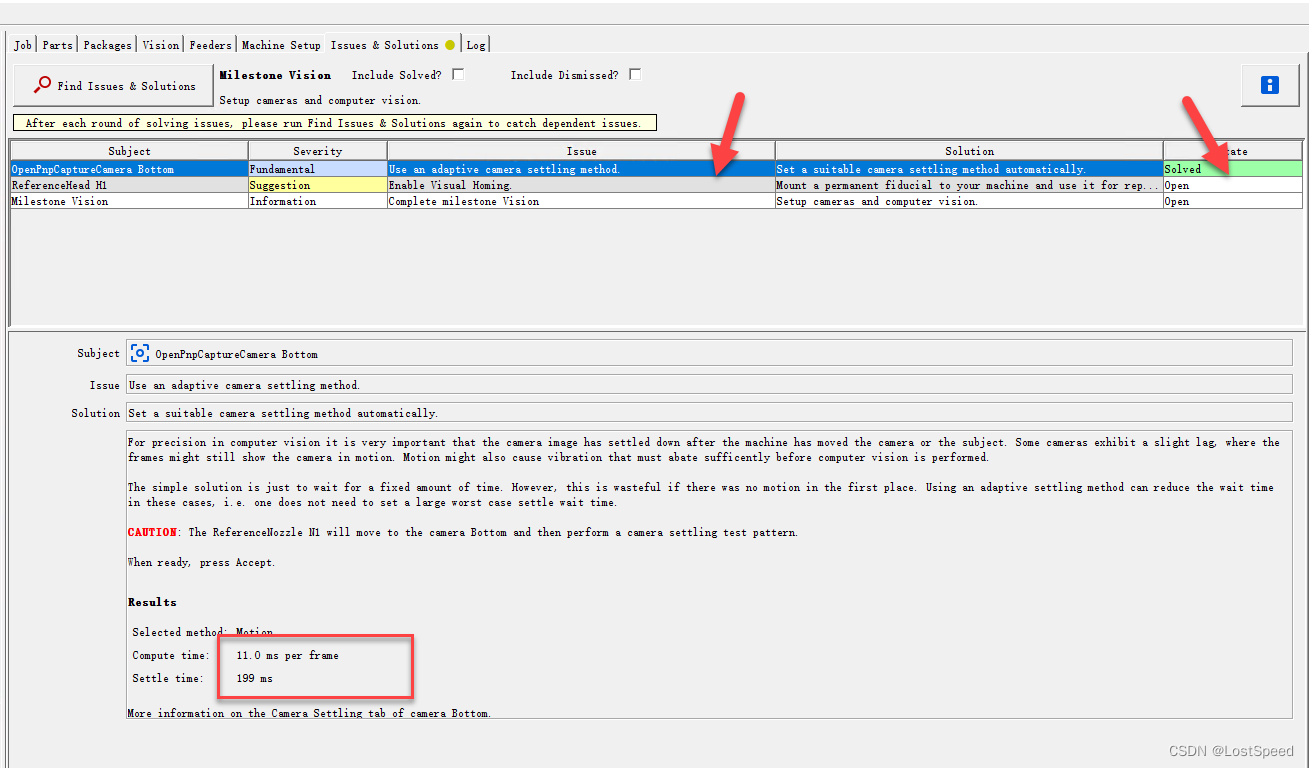
现在第一个问题是建立顶部相机的稳定时间.
根据提示, 将顶部相机移动到主校准点, 相机中心十字线框住主校准点中心.
因为现在主校准点已经校验完成, 配置文件中有主校准点的位置, 可以一步就过去.
将Z升到安全高度.
回问题页面, 再问题条目下的操作区, 点击接受.
问题解决, 继续查找问题.
现在要自动设置底部相机稳定时间.
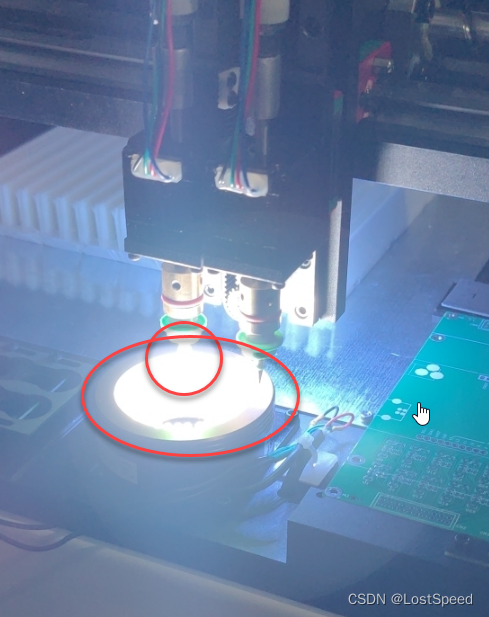
将N1吸嘴移动到底部相机中心线上.
先将N1大致移动到底部相机位置
然后再用JOG面板微调, 直到N1吸嘴落到底部相机中心.
在问题页面点击接受, 大概2秒钟, 校准完成.
查找问题
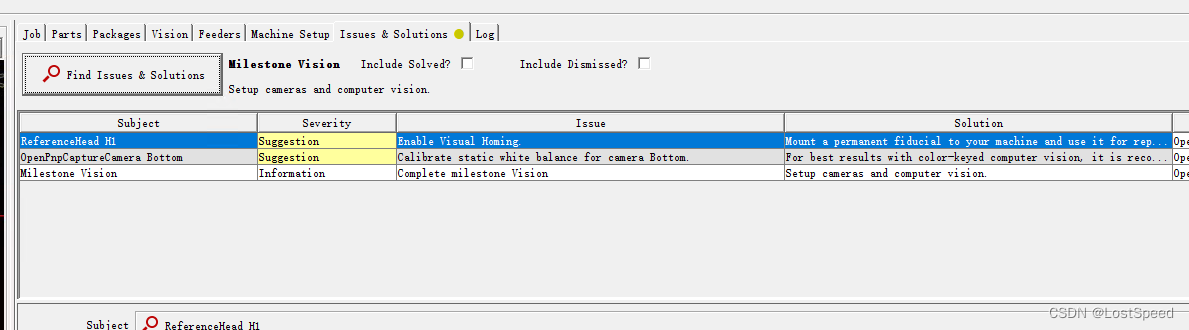
现在有2个建议级别问题.
第2行是进行底部相机白平衡矫正, 正好现在N1就在底部相机上面, 来, 先搞这个.
因为底部相机就是照吸嘴和元件的, 现在吸嘴上没元件, 其他场景都一样啊. 先试试.
选中底部相机白平衡问题条目, 然后点击接受.
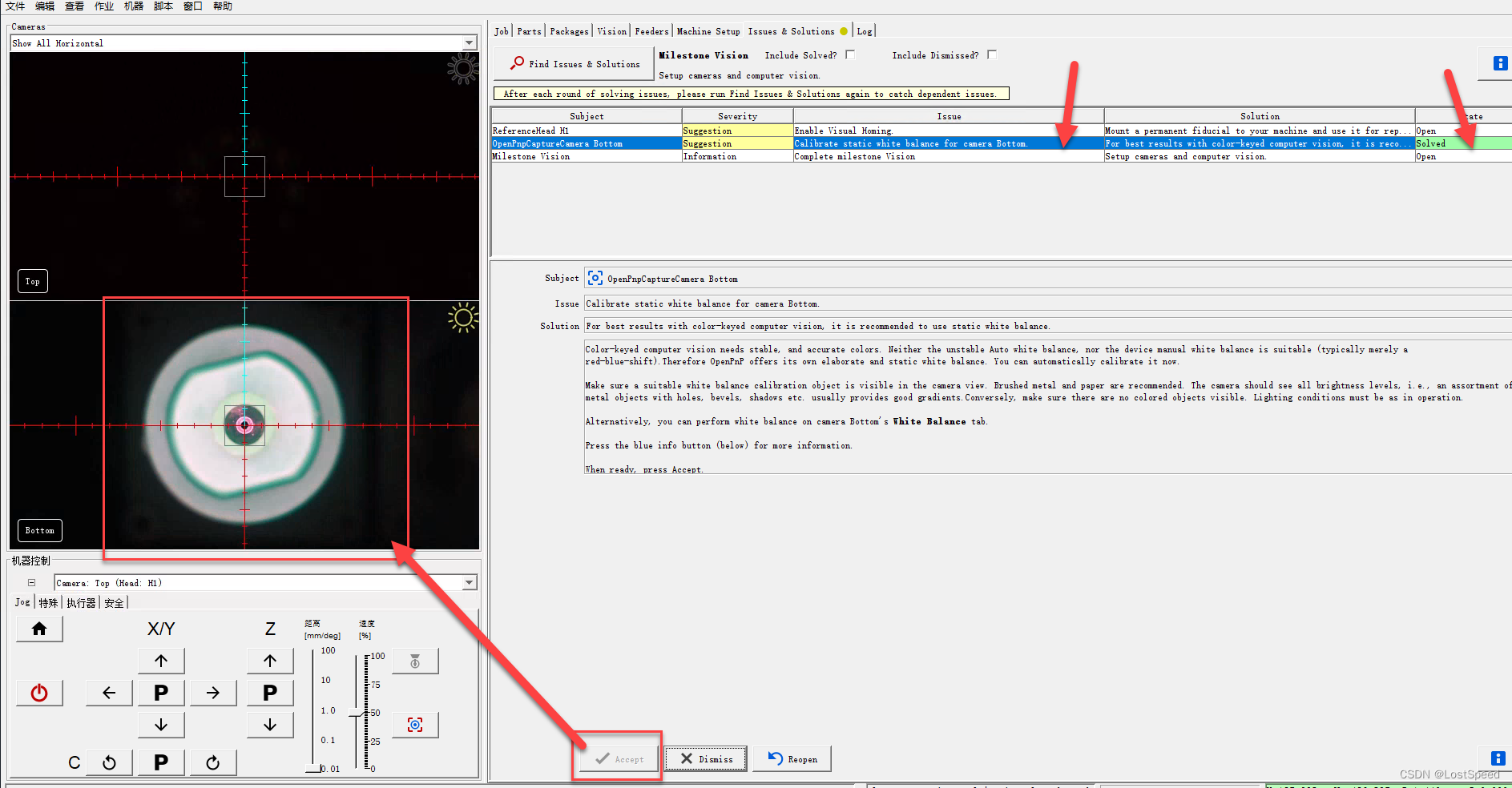
很顺利, 矫正完了. 底部相机照出来的绿吸嘴, 现在变白了, 好像吸嘴的外孔看的更清楚了, 不知道是不是心里作用.
查找问题.
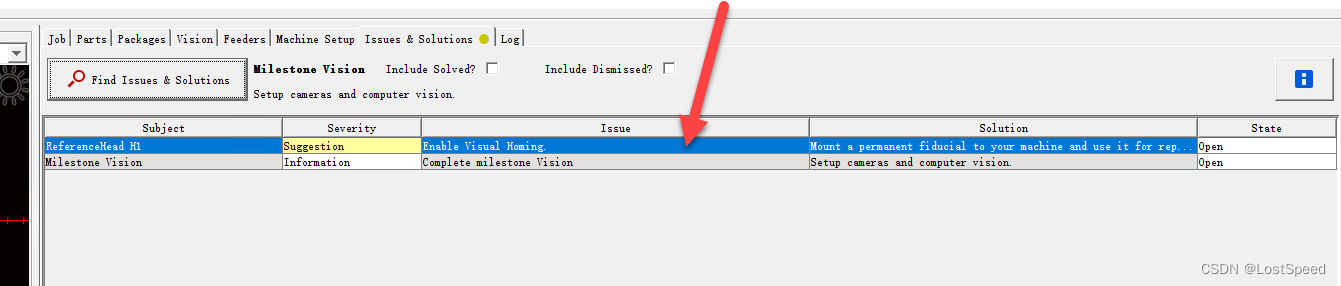
现在除了里程碑, 还有一个建议问题:是能视觉原点.
根据提示, 先将N1移动到主视觉原点上, 用H1那里保存的主基准点坐标就行, 一步就能过去.

回到问题页面, 点击问题条目, 在问题描述区, 用绿圈框住主基准点.
点击接受, 开始自动矫正.大概3秒钟矫正完成.
查找问题.
现在只剩下校验里程碑了, 点击接受, 进入矫正里程碑.
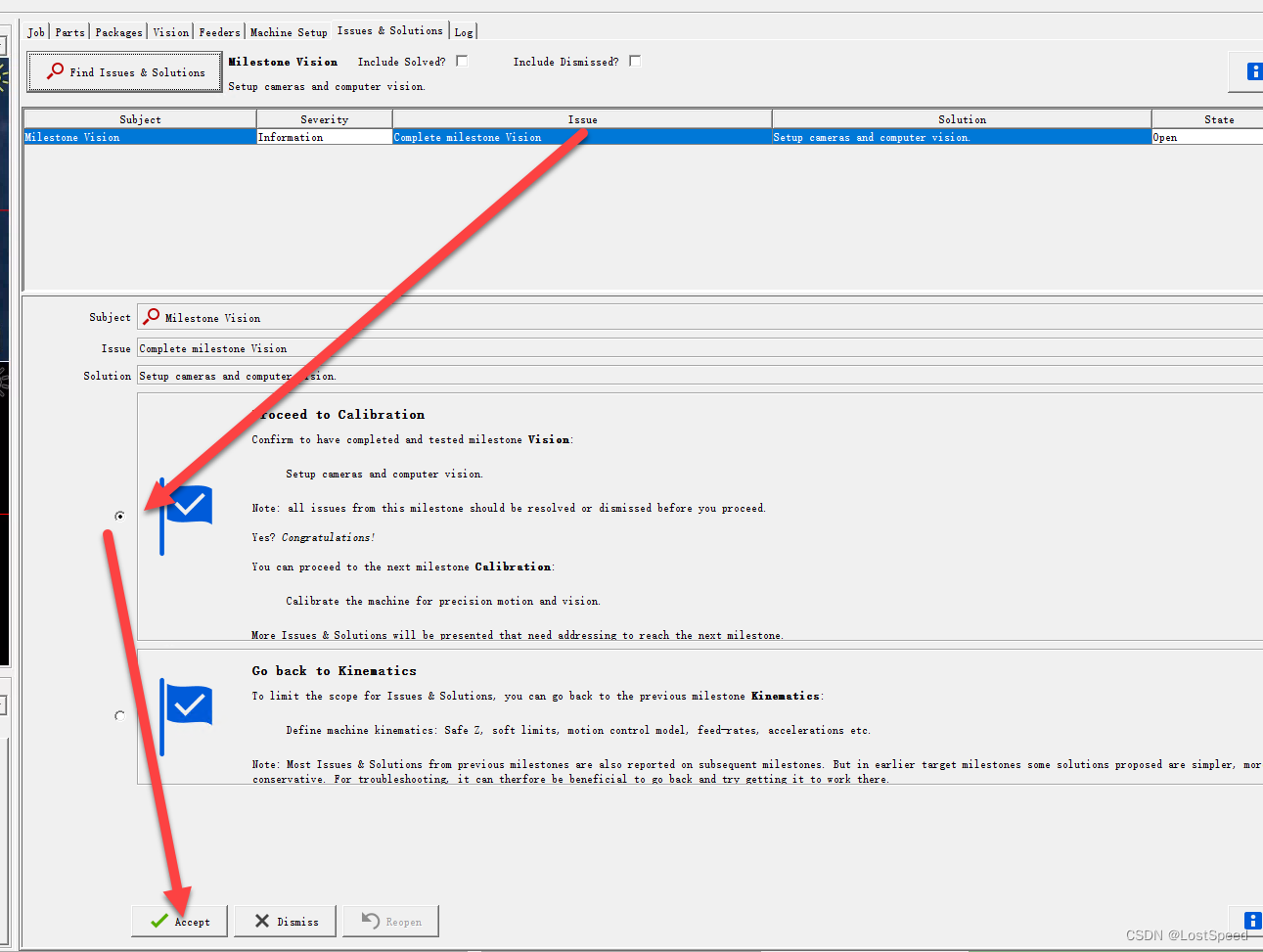
在矫正里程碑中查找问题, 向导又给出要解决的一些新问题. 在下一个笔记中解决这些问题.
备注
openpnp - configure - 索引贴