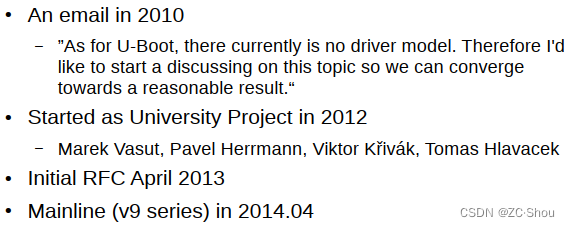
U-Boot 在 2014 年 4 月参考 Linux Kernel 的驱动模型设计并引入了自己的 Driver Model(官方简称 DM) 驱动架构。这个驱动模型(DM)为驱动的定义和访问接口提供了统一的方法,提高了驱动之间的兼容性以及访问的标准性。
文中涉及的代码均放到了我个人的 Github 上:https://github.com/ZCShou/BOARD-STM32F769I-EVAL,大家可以直接拿来边学习边验证,避免眼高手低。 本文中涉及的源码主要是使用 U-Boot-v2022.10,不同版本源码差异可能较大!!!
配置
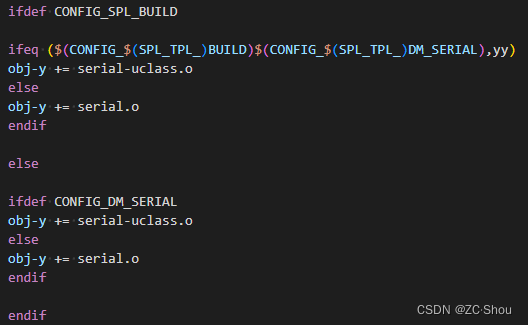
DM 架构需要通过配置项 CONFIG_DM=y 来启用,对应的实际外设的驱动则需要通过使能 CONFIG_DM_xxx 来使能。其中,xxx 表示某个具体的外设,例如,启用 CONFIG_DM_SERIAL 则会自动启用 Makefile 中添加对应的源码文件:
目前,绝大多数的设备的驱动均已经完全迁移到了 DM 架构,所以,在实际源码中,我们经常可以看到 CONFIG_DM_xxx 对应的驱动接口被实现了,旧版的则没有实现或者直接没有旧的驱动接口了(部分驱动仍然是旧驱动模式)。

链接选项
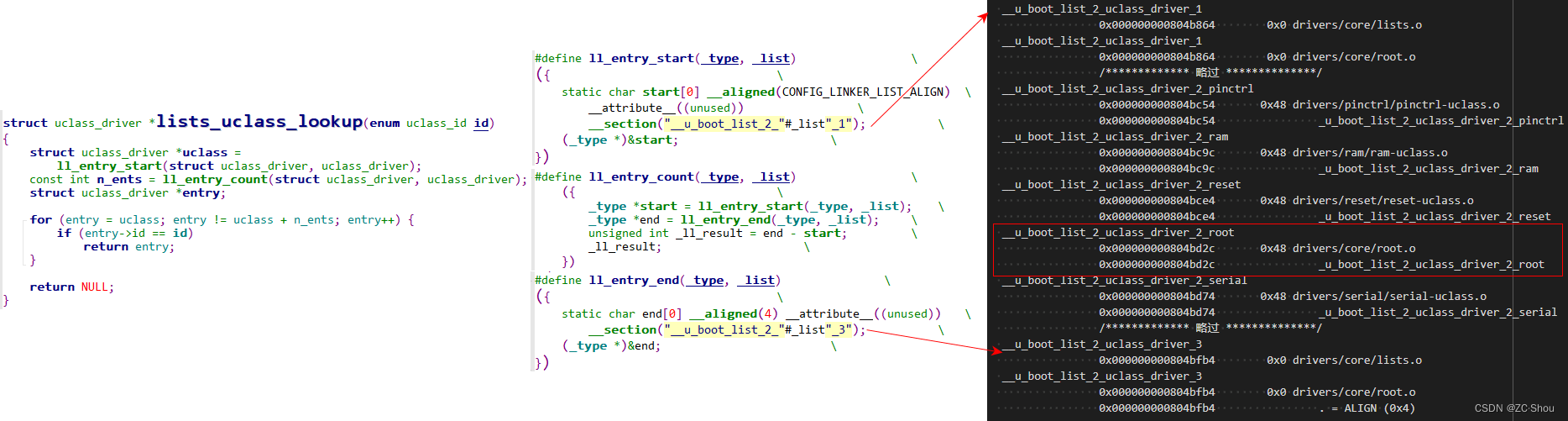
DM 驱动在编译后会被统一存放在最终的镜像文件中,每个设备的 DM 架构的驱动都会在编译时单独放到一个节区当中。 当我们编译 U-Boot 时所有这些驱动程序都会使用 __u_boot_list_2_"#_list"_2_"#_name 的节区作为名字,此外,这些节区还会被 __u_boot_list_2_"#_list"_1 和 __u_boot_list_2_"#_list"_3 包裹起来,这样就可以计算出所有 __u_boot_list_2_* 的大小。这些信息可以直接在 u-boot.map 看到:
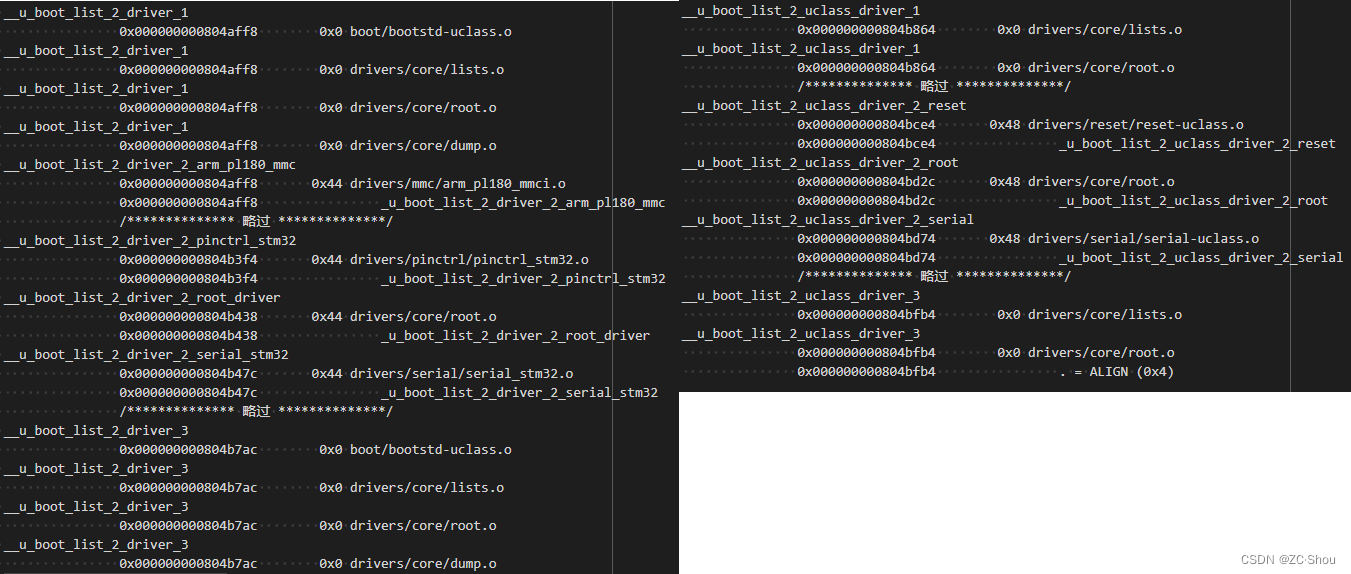
实际不只有驱动,其他部分,例如,cmd,也是这样处理的
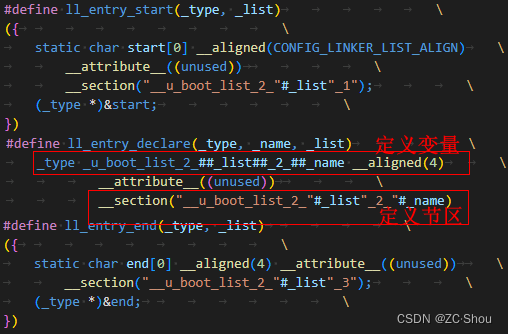
代码中的实现方式的关键就在于 UCLASS_DRIVER(__name)、U_BOOT_DRIVER(__name) 等这几个宏值,这些宏值最终都会引用 ./include/linker_lists.h 中的相关宏 ll_entry_declare,这个就是实现的关键。
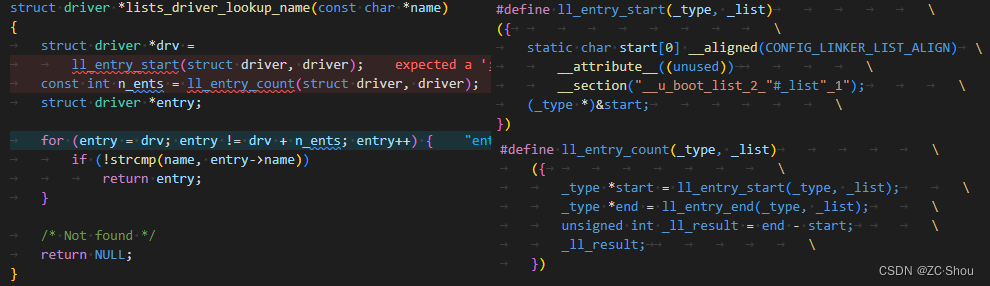
在初始化过程中,U-Boot 就会遍历上面这些节区,然后进行内容匹配,依次创建各种设备和对应的 UCLASS。如下是根据驱动的名字查找指定驱动的方法:
Device Tree / Platform Data
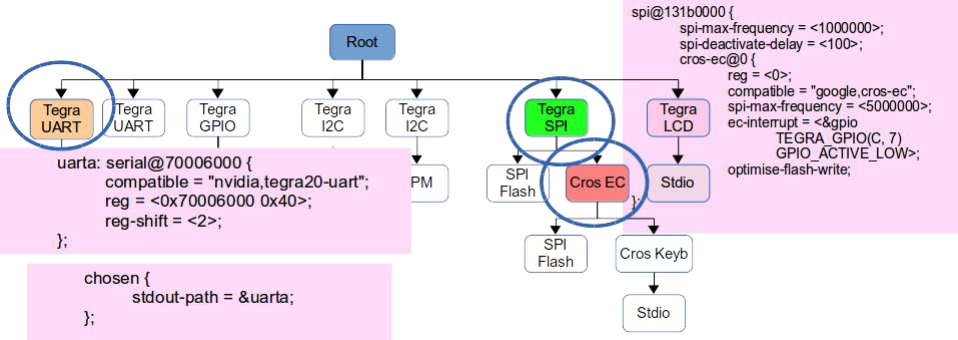
驱动必须知道硬件的基本信息,U-Boot 支持 Platform Data(平台数据,代码中常简称 plat 或 platdata)和 Flattened Device Tree(设备树,代码常简称 fdt)这两种硬件基本配置信息提供方式。其中,平台数据是旧方式,设备树则是标准方式。
Platform Data
Platform Data 是通过一个 C 结构体来将平台特定的配置信息(寄存器的地址,总线速度等)传递给驱动程序,设备信息最终被存放到 udevice ->plat_ 指向的内存中, 驱动可以随时通过 dev->plat_ 访问他们的数据。官方指出,除非有必要的理由,否则不要使用平台数据这种方式,而应该使用设备树方式。
static const struct dm_demo_pdata red_square = {
.colour = "red",
.sides = 4.
};
/* 直接定义(不推荐) */
static const struct driver_info info[] = {
{
.name = "demo_shape_drv",
.plat = &red_square,
},
};
demo1 = driver_bind(root, &info[0]);
/* 使用 U_BOOT_DRVINFO 宏(推荐) */
U_BOOT_DRVINFO(demo0) = {
.name = "demo_shape_drv",
.plat = &red_square,
};
Platform Data 只有在有当内存限制不允许使用设备树时才会使用。 此外,U-Boot 提供了一种方法,自动将设备树转换为 Platform Data,即 of-platdata 特性。但是,of-platdata 仅在 SPL/TPL 阶段可用。
Device Tree
设备树提供了一种更灵活的提供设备数据的方法,官方推荐要使用设备树方式。U-Boot 内部将自动解析设备树获取相关设备信息,设备信息最终也是被存放到 udevice ->plat_ 指向的内存中(具体方式就是通过 driver 中的 plat_auto 和 of_to_plat)。
框架
U-Boot 的 DM 使用 uclass 和 udevice 这两个抽象的类来管理所有的设备驱动,这两个抽象类分别各自对应 uclass_driver 和 driver。udevice 是根据 driver 动态创建的;uclass 是根据 uclass_driver 创建的。但是只有在创建 udevice 才会查找对应的 uclass ,因此, 最终是只有 driver 存在时,才会创建 uclass。
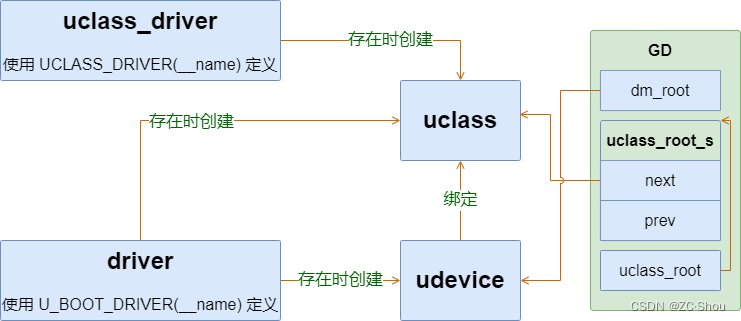
真正有用的是一个个独立的 uclass_driver 和 driver,他们分别通过 uclass 和 udevice 管理起来。在代码实现上,uclass 和 udevice 其实都是双向链表的节点,通过双向链表将所有驱动串起来进行管理。并最终由 global_data 中的相关变量指示链表位置。一个简易的框图如下所示:
官方提供了一个驱动 DEMO (drivers/demo),通过开启 CONFIG_DM=y、CONFIG_CMD_DEMO=y、CONFIG_DM_DEMO=y、CONFIG_DM_DEMO_IMX6ULL=y 就可以把这个 DEMO 添加我们的构建中,然后进行学习测试。
global_data
./include/asm-generic/global_data.h 文件中的 struct global_data 结构管理着整个 U-Boot 的全局变量,当我们定义 CONFIG_DM=y 后,global_data 中就会多出一些 DM 相关的字段,保存 DM 相关信息。具体见下面的代码注释:
struct global_data {
/* ... 略 ... */
#ifdef CONFIG_DM
struct udevice *dm_root; /* 指向 DM 的根设备 */
struct udevice *dm_root_f; /* 指向重定向前的 DM 的根设备 */
struct list_head uclass_root_s; /* 非只读性内存中的 UCLASS 链表表头 */
struct list_head *uclass_root; /* UCLASS 链表表头指针,非只读内存中他就指向上面的 uclass_root_s */
/* ... 略 ... */
#endif
/* ... 略 ... */
uclass 和 uclass_driver
uclass 和 uclass_driver 定义在 ./include/dm/uclass.h 文件中,其中,uclass 将同类型的设备划为一组进行归类管理;uclass_driver 为一组相关的驱动程序提供了一致的接口。uclass 与 uclass_driver 是一一对应的。
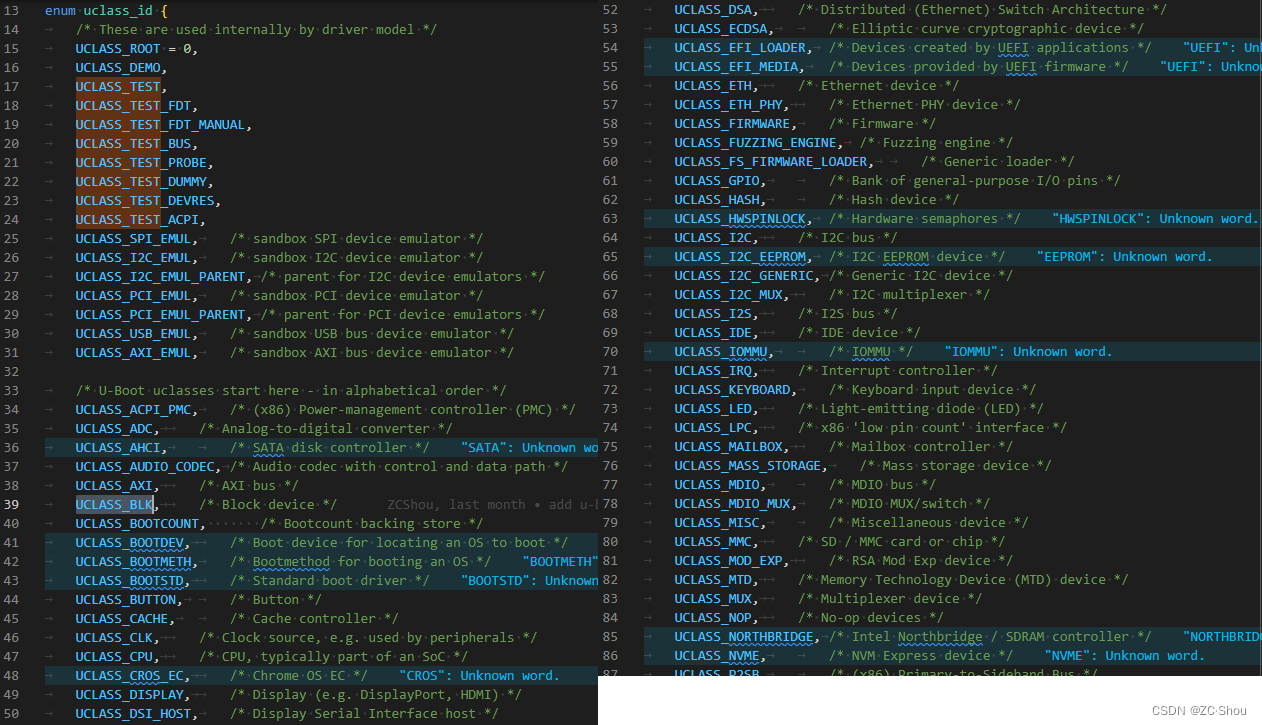
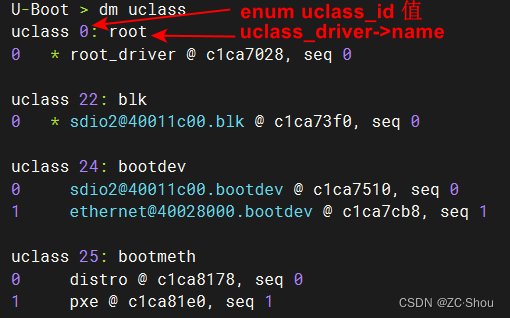
在表述中,我们通常使用 uclass_id 来表示一个 uclass,例如,UCLASS_ROOT 表示 ROOT UCLASS 本身,其对应的驱动则称为 uclass_driver_root。 uclass 的 ID 可用值定义在 ./include/dm/uclass-id.h 文件的 enum uclass_id 中,当时需要注意,该 ID 实际是在 struct uclass_driver 中被使用。
struct uclass
uclass 将同类型的设备划为一组进行归类管理。注意,uclass 是 U-Boot 在初始化过程中自动生成的,并且不是所有 uclass 都会生成,有对应 uclass_driver 并且有被 udevice 匹配到的 uclass 才会生成(下面的初始化章节详细说明)。
struct uclass {
void *priv_; /* uclass 本身使用的私有数据指针。不对外使用。*/
struct uclass_driver *uc_drv; /* 一个 UCLASS 对一个 uclass_driver,这个指针指向对应的 uclass_driver */
struct list_head dev_head; /* 本 UCLASS 下对应的 udevice 链表 */
struct list_head sibling_node; /* 本 UCLASS 节点本身的前后节点(用于串联 uclass 链表) */
};
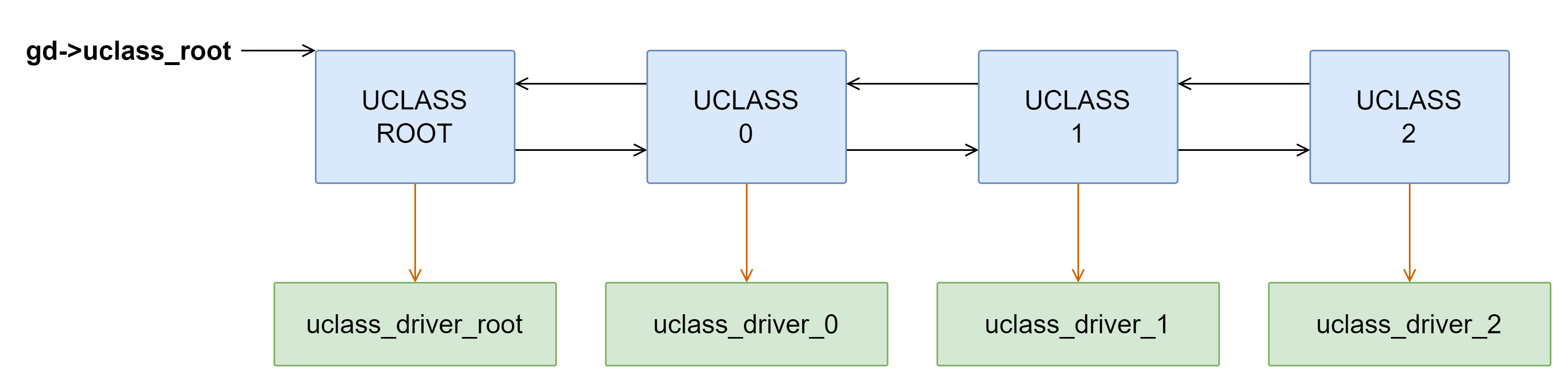
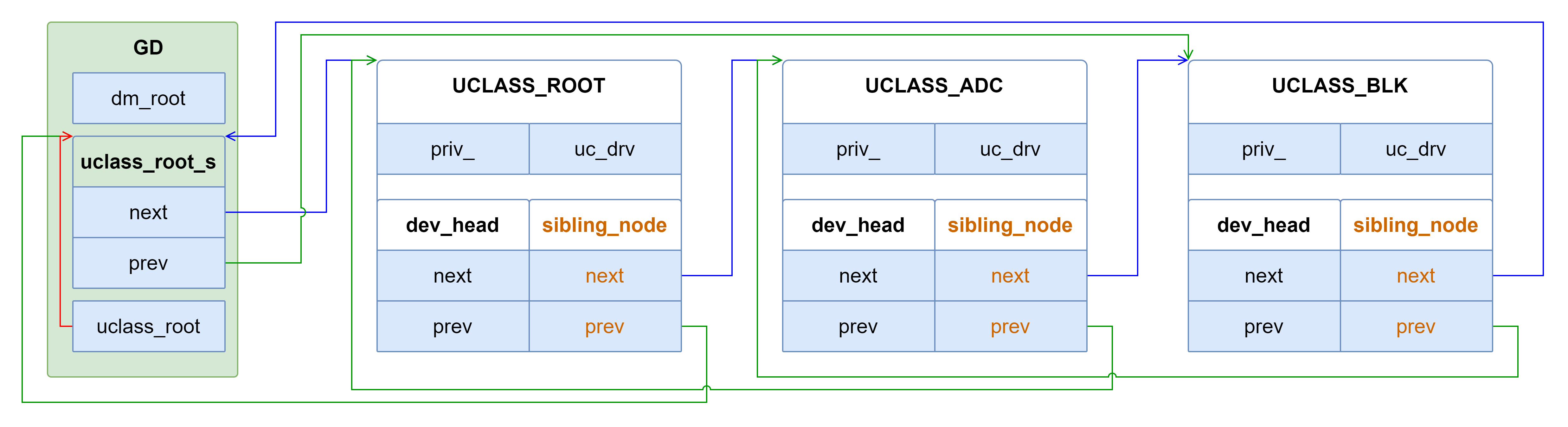
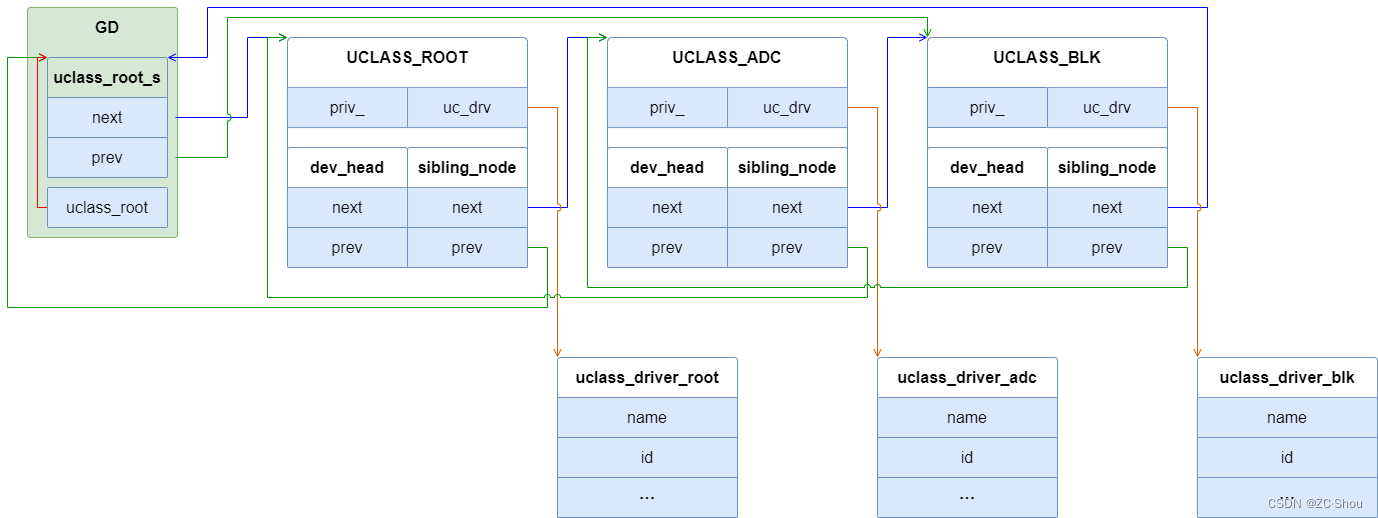
在代码实现上,struct uclass 这个结构体其实就是一个链表节点,当 DM 初始化之后,所有的 uclass 会形成一个由 gd->uclass_root 为链表头的双向链表。这个链表是通过其中的 sibling_node 这个这个成员串起来的。
在初始化时,会遍历所有 uclass_driver,每发现一个 uclass_driver 就会查找其中的 ID 对应的 uclass 是否存在(判断条件是已存在的 uclass->uc_drv->id 是否等于当前 uclass_driver->id),不存在就会以 uclass_driver 中的 ID新建一个 uclass,然后关联到 uclass_driver 上。也就是说,uclass 是根据 uclass_driver 动态创建的。
struct uclass_driver
uclass_driver 为一组相关的驱动程序提供了一致的接口,每一个 uclass 都会对应一个 uclass_driver 。在代码实现上,struct uclass 中的 uc_drv 就指向了当前 uclass 对应的 uclass_driver。
struct uclass_driver {
const char *name; /* uclass driver 的名称,在定义 uclass_driver 时,填写的一个字符串 */
enum uclass_id id; /* uclass 的 ID 号,取值见 ./include/dm/uclass-id.h 文件中的 enum uclass_id 定义 */
int (*post_bind)(struct udevice *dev); /* 在一个新设备绑定到这个 uclass 后被调用 */
int (*pre_unbind)(struct udevice *dev); /* 在一个设备从该 uclass 解绑定之前调用 */
int (*pre_probe)(struct udevice *dev); /* 在 probe 一个新设备之前调用 */
int (*post_probe)(struct udevice *dev); /* 在 probe 一个新设备之后调用 */
int (*pre_remove)(struct udevice *dev); /* 在移除设备之前调用 */
int (*child_post_bind)(struct udevice *dev); /* 在这个 uclass 的 child 绑定到一个设备之后被调用 */
int (*child_pre_probe)(struct udevice *dev); /* 在这个 uclass 的 child 被 probed 之前被调用 */
int (*child_post_probe)(struct udevice *dev); /* 在这个 uclass 的 child 被 probed 之后被调用 */
int (*init)(struct uclass *class); /* 在创建一个新的 uclass 时被调用 */
int (*destroy)(struct uclass *class); /* 在 uclass 被销毁时被调用 */
int priv_auto; /* 如果非零,它就是 uclass->priv_ 指针中分配的私有数据的大小。如果为 0,则 uclass driver 负责分配所需私有数据的空间 */
int per_device_auto; /* 每个 device 都可以将 uclass 拥有的私有数据保存在自己的 dev->uclass_priv_ 中。如果该值是非零,将在 device 初始化时自动分配该值大小的空间 */
int per_device_plat_auto; /* 每个 device 都可以将 uclass 拥有的平台数据保存在自己的 dev->uclass_plat_ 中。如果该值是非零,将在 device 初始化时自动分配该值大小的空间 */
int per_child_auto; /* 每个子设备可以保存它的 parent 私有数据到 dev->parent_priv_ 中。如果该值是非零,将在 device 初始化时自动分配该值大小的空间。在 udevice 对应的 driver 中,也存在该变量,只有 udevice 对应的 driver 中该值为 0 时,才会使用该值 */
int per_child_plat_auto; /* 每个子设备可以保存它的 parent 平台数据到 dev->parent_plat_ 中。如果该值是非零,将在 device 初始化时自动分配该值大小的空间。在 udevice 对应的 driver 中,也存在该变量,只有 udevice 对应的 driver 中该值为 0 时,才会使用该值 */
uint32_t flags; /* 这个 uclass 的标志(DM_UC_…) */
};
在代码实现中,uclass_driver 必须使用宏 UCLASS_DRIVER(__name) 来进行定义。该宏值除了使用 struct uclass_driver 定义 __name 变量外,还会定义一个同名节区,并将 __name 放到这个同名的节区当中。以 serial 为例,如下所示:

uclass_driver 是通过 struct uclass 链表管理起来的,每个 uclass_driver 都必须关联到一个指定的 struct uclass 上(链表节点上),当不存在 uclass_driver 对应的 struct uclass 时,就会自动创建一个 struct uclass 然后关联起来。
udevice 和 driver
udevice 和 driver 定义在 ./include/dm/device.h 文件中,其中,udevice 是一个抽象类表示一个设备(驱动程序的实例);driver 则是一个设备实际对应的驱动程序。udevice 与 driver 可以是多对一的关系(即多个设备可能共用同一个 driver)。
不同于 UCLASS,udevice 和 driver 中均有 name 成员来标识自己,而且这两个名字可以是不相同的,也可以相同。例如,ROOT 设备的名字和 ROOT 驱动的名字均为 root_driver。设备树中定义的设备名字通常是节点名,而对应的驱动名字则是代码中一个有确切含义的字符串。
struct udevice
udevice 包含有关设备的信息,其本质上是一个驱动程序实例,必须绑定到特定 port 或 peripheral 的驱动上的(udevice 必须通过其成员 const struct driver *driver 与一个指定的 driver 关联)。udevice 本身并无法关联 UCLASS,必须根据其关联 struct driver 中的 id 属性来关联其所在的 UCLASS 的。
struct udevice {
const struct driver *driver;/* 此设备使用的驱动程序 */
const char *name; /* 设备名称,通常为 FDT 节点名称 */
void *plat_; /* 此设备的配置数据(DM 之外不能访问),这通常由驱动程序制定大小,并且由驱动程序负责填充内容 */
void *parent_plat_; /* 该设备的父总线配置数据(DM 之外不能访问) */
void *uclass_plat_; /* 此设备对应的 uclass 的配置数据(DM 之外不能访问) */
ulong driver_data; /* 驱动程序数据字,用于将此设备与其驱动程序相匹配的条目 */
struct udevice *parent; /* 该设备的父设备,顶级设备(例如,ROOT DEVICE)的 parent 为 NULL */
void *priv_; /* 此设备的私有数据(DM 之外不能访问) */
struct uclass *uclass; /* 指向该设备对应的 uclass 的指针 */
void *uclass_priv_; /* 此设备对应的 uclass 的私有数据(DM 之外不能访问) */
void *parent_priv_; /* 此设备的父设备的私有数据 */
struct list_head uclass_node; /* 由此设备对应的 uclass 用于连接它的设备 */
struct list_head child_head; /* 此设备的子设备列表 */
struct list_head sibling_node; /* 所有设备列表中的下一个设备 */
#if !CONFIG_IS_ENABLED(OF_PLATDATA_RT)
u32 flags_; /* 此设备的标志 DM_FLAG_xx */
#endif
int seq_; /* 为该设备分配的序列号(-1 表示没有序列号)。这是在设备绑定时设置的,在设备对应的 uclass 中是唯一的。如果设备在设备树中有别名,则别名用于设置序列号。否则,使用下一个可用号码。序列号用于某些需要对设备进行编号的命令(例如 mmc dev)(DM 之外不能访问)*/
#if CONFIG_IS_ENABLED(OF_REAL)
ofnode node_; /* 此设备的设备树节点的引用 */
#endif
#if CONFIG_IS_ENABLED(DEVRES)
struct list_head devres_head; /* 与此设备关联的内存分配列表。当 CONFIG_DEVRES 被启用时,devm_kmalloc()和 friends 会添加到这个列表中。这样分配的内存将在移除或解绑设备时自动释放 */
#endif
#if CONFIG_IS_ENABLED(DM_DMA)
ulong dma_offset; /* (CPU 的)物理地址空间和设备总线地址空间之间的偏移量 */
#endif
};
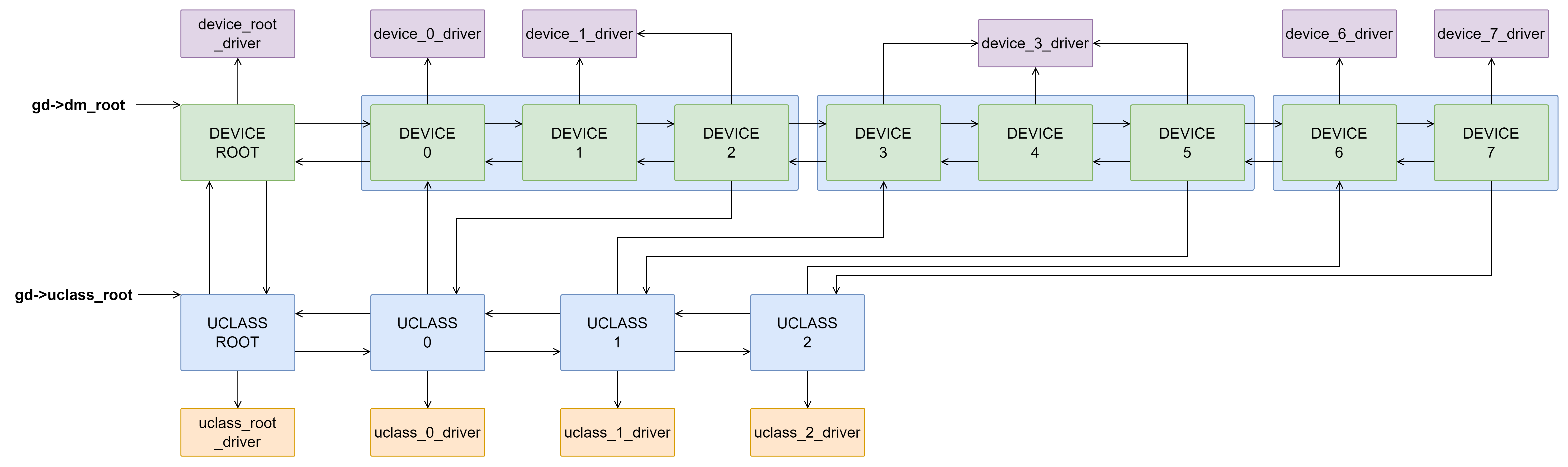
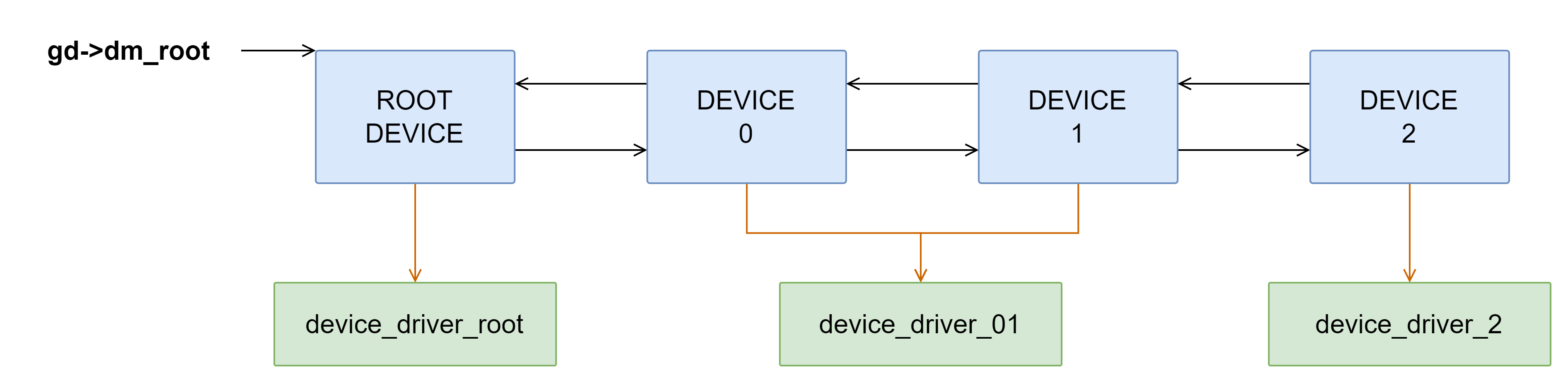
在代码实现上,struct udevice 这个结构体其实就是一个链表节点,当 DM 初始化之后,所有的 udevice 会形成一个由 gd->dm_root 为链表头的双向链表,这个链表是通过其中的 child_head 和 sibling_node 这个这个成员串起来的。与 uclass 不同, udevice 还支持通过 uclass_node 串联到 UCLASS 中。即一个 struct udevice 会同时位于多个链表中。

在初始化时,会遍历所有 driver ,每发现一个 driver 就会查找对应的 udevice 是否存在,不存在就会以 driver 的名字新建一个设备。也就是说,udevice 是根据 driver 动态创建的。
一个设备将通过一个 ‘bind’ 调用来产生,要么是由于 U_BOOT_DRVINFO() 宏(在这种情况下,plat 是非 null),要么是由于设备树中的一个节点(在这种情况下,of_offset为 >= 0)。在后一种情况下,我们将在驱动程序的 of_to_plat 方法中将设备树信息转换为 plat(如果设备有设备树节点,则在 probe 方法之前调用)。
关于 Device Sequence Numbers
在多数情况下 U-Boot 从 0 开始为设备进行编号。这个编号唯一地标识了其 UCLASS 中的一个设备,因此在一个特定 UCLASS 中没有两个设备可以具有相同的序列号。
序列号从 0 开始,但允许有间隙。 例如,一个开发板可能有 I2C1、I2C4、I2C5,但没有 I2C0、I2C2、I2C3。设备如何编号的选择取决于特定的开发板,在某些情况下可能由 SoC 设置。
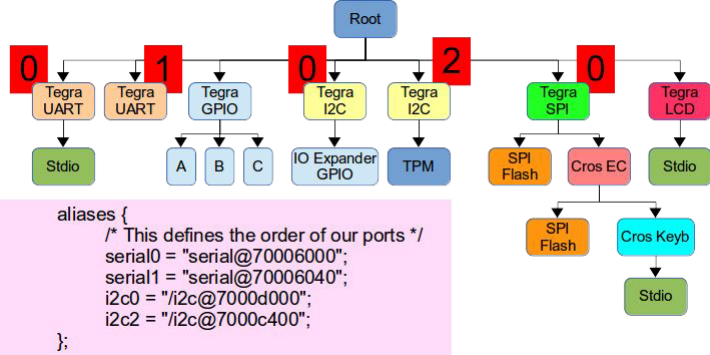
设备序列号在绑定设备时进行解析,存储在 udevice->seq_ 成员变量中,且在设备的整个生命周期内都不会改变。
struct driver
driver 含有创建新设备和删除设备的方法,设备由 platdata 或者 device tree 节点(通过查找与 of_match 匹配的 compatible 字符串进行配对)提供的信息来设置自己。
struct driver {
char *name; /* 设备名字。在定义 driver 时指定的一个字符串 */
enum uclass_id id; /* 标记此驱动属于哪个 uclass 的 id,取值是 ./include/dm/uclass-id.h 中定义的 enum uclass_id */
const struct udevice_id *of_match; /* 要匹配的 compatible 字符串列表 */
int (*bind)(struct udevice *dev); /* 绑定 device 到它的 driver 时被调用 */
int (*probe)(struct udevice *dev); /* 被调用来探测一个设备,即激活设备 */
int (*remove)(struct udevice *dev); /* 被调用来移除一个设备 */
int (*unbind)(struct udevice *dev); /* 调用来解除设备与其驱动程序的绑定 */
int (*of_to_plat)(struct udevice *dev); /* 在 probe 之前,解析对应 udevice 的 dts 节点,转化成 udevice 的平台数据(存放于 udevice->plat_ 中) */
int (*child_post_bind)(struct udevice *dev); /* 在一个新的 child 设备被绑定之后调用 */
int (*child_pre_probe)(struct udevice *dev); /* 在探测子设备之前调用。设备已分配内存,但尚未被探测。. */
int (*child_post_remove)(struct udevice *dev); /* 在移除子设备后调用。设备已经分配了内存,但是它的 device_remove() 方法已经被调用 */
int priv_auto; /* 如果非零,这是在 udevice->priv_ 指针中分配的私有数据的大小。如果为零,则驱动程序负责分配所需的任何数据。 */
int plat_auto; /* 如果非零,这是要分配到 udevice->plat_ 指针中的平台数据的大小。这通常只对支持设备树的驱动程序(使用 of_match 的驱动程序)有用,因为使用 platform data 的驱动程序将拥有 U_BOOT_DRVINFO() 实例化中提供的数据 */
int per_child_auto; /* 每个设备都可以保存其父设备拥有的私有数据。如果需要,如果该值非零,将自动分配到 udevice->parent_priv_ 指针中。 */
int per_child_plat_auto; /* 总线喜欢存储关于其子节点的信息。如果非零,这是该数据的大小,将分配到子对象的 udevice->parent_plat_ 指针中 */
const void *ops; /* driver的具体操作,这通常是一个由driver定义的函数指针列表,用于实现 uclass 所需的驱动程序函数。 */
uint32_t flags; /* 驱动程序标志-参见' DM_FLAGS_…' */
#if CONFIG_IS_ENABLED(ACPIGEN)
struct acpi_ops *acpi_ops; /* 高级配置和电源接口(ACPI)操作,允许设备向传递给Linux的ACPI表中添加东西 */
#endif
};
struct driver 都属于 UCLASS,代表同一类型的一类设备。驱动程序的共同元素可以在 UCLASS 中实现,或者 UCLASS 可以为其中的驱动程序提供一致的接口。udevice 是根据 struct driver 中的 id 属性来关联其所在的 UCLASS。
在代码实现中,driver 必须使用宏 U_BOOT_DRIVER(__name) 来进行定义。该宏值除了使用 struct uclass_driver 定义 __name 变量外,还会定义一个同名节区,并将 __name 放到这个同名的节区当中。以 serial 为例,如下所示:

driver 是通过 struct udevice 链表管理起来的,每个 driver 都必须关联到一个指定的 struct udevice 上(链表节点上),当不存在 driver 对应的 struct udevice 时,就会自动创建一个 struct udevice 然后关联起来。

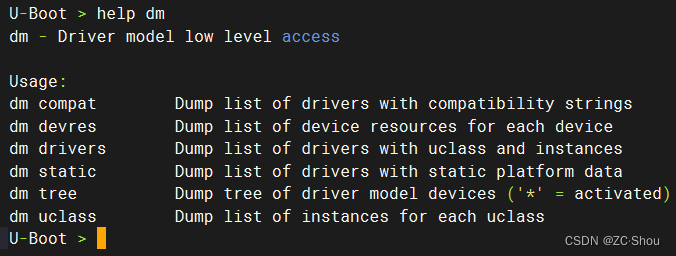
DM 命令
U-Boot 在 ./cmd/dm.c 文件中提供了 DM 相关的命令,可以在 U-Boot 命令界面查看 DM 相关信息。进入 U-Boot 的命令行模式以后输入 help 或者 ?,然后按下回车即可查看当前 U-Boot 默认支持的所有命令。还可以输入help 命令名 或者 ? 命令名 来查看命令的详细用法,例如,help dm 就会打印出 dm 这个命令的详细介绍。
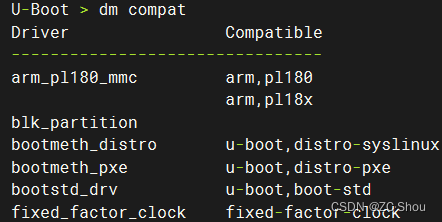
dm compat
dm compat 用于显示与每个驱动程序相关联的兼容字符串(可以在每个开发板的设备树文件中查找这些字符串),如果有多个字符串,则每行显示一个。
各列含义如下:
| 列名 | 含义 |
|---|---|
| Driver | 驱动的名字,即 driver->name 的值 |
| Compatible | 驱动兼容字符串,即 driver->of_match 的值。如果设备树中 Compatible 与这里的匹配,则表示设备树节点设备使用该驱动 |
dm devres
dm devres用于显示一个设备的 devres(设备资源)记录列表。一些驱动程序使用 devres API 来分配内存,这样当设备被移除时,就可以自动释放内存(在驱动程序的 remove() 方法中不需要任何代码)。
该特性需要定义
CONFIG DEVRES来启用。
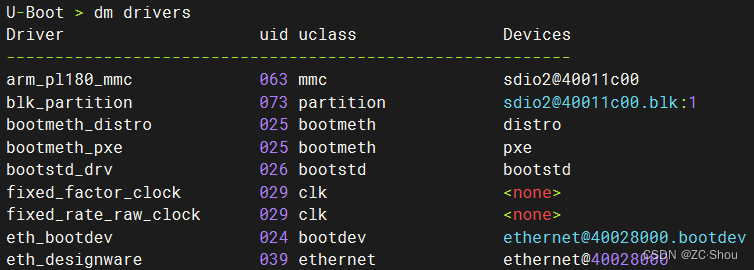
dm drivers
dm drivers 用于显示所有可用的驱动程序,驱动程序对应的 UCLASS 和使用该驱动程序的设备列表(多个设备时每行一个设备),每行一个驱动。如果驱动程序没有对应的设备,则设备显示为 none。
各列含义如下:
| 列名 | 含义 |
|---|---|
| Driver | 驱动的名字,即 driver->name 的值 |
| uid | UID 即 enum uclass_id 中对应的值 |
| uclass | UCLASS 名字,即 uclass_driver->name 的值 |
| Devices | 设备名字,即 udevice->name 的值 |
dm static
dm static 用于显示由平台数据绑定的设备,即不是来自设备树的设备。这些通常都没有,但一些开发板可能会出于空间原因使用静态设备。
| 列名 | 含义 |
|---|---|
| Driver | driver->name 中定义的驱动的名字 |
| Address | 驱动的内存地址 |
dm tree
dm tree 用于显示设备的完整树。
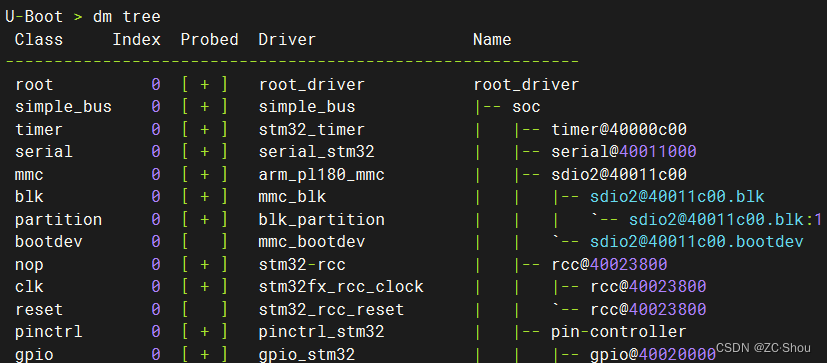
各列含义如下:
| 列名 | 含义 |
|---|---|
| Class | 设备的 UCLASS 名,即 uclass_driver->name 的值 |
| Index | 在 UCLASS 中设备的索引号。注意不是 Sequence Number。 |
| Probed | 如果设备处于活动状态,则显示 + |
| Driver | 此设备使用的驱动程序的名称,即 driver->name 的值 |
| Name | 以树型结构(含子设备容易查看)显示设备名称(即 udevice->name 的值) |
dm uclass
dm uclass 用于显示每个类以及该类中的设备列表。
container_of
DM 中是通过链表来管理设备的,链表的管理用到了 scripts/kconfig/list.h 中定义的 container_of 这个宏。U-Boot 中的 container_of 就是从 Linux 拿过来,这个宏的设计还是比较有意思,必须要重点解析一下。乍一看这个宏并不复杂,就一个代码块({})两个独立的语句(;)。
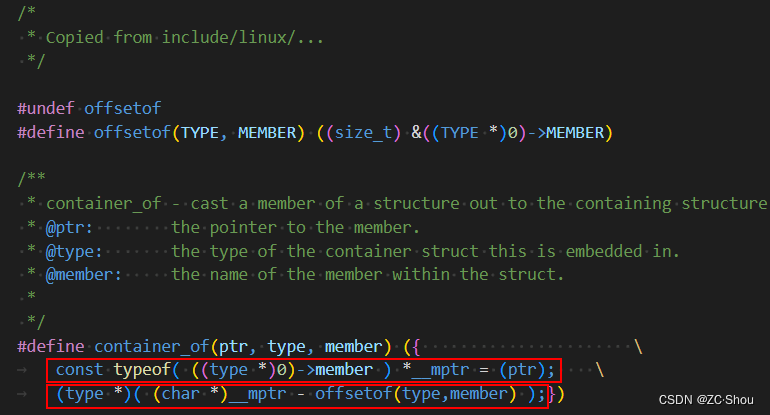
const typeof( ((type *)0)->member ) *__mptr = (ptr);
typeof 是关键字,获取成员类型。所以,前半句 const typeof( ((type *)0)->member ) 实际就是获取 member 的类型,整句就是以 member 的类型定义指针变量 _mptr 并赋值为 ptr,ptr 实际是指向 member 的指针。
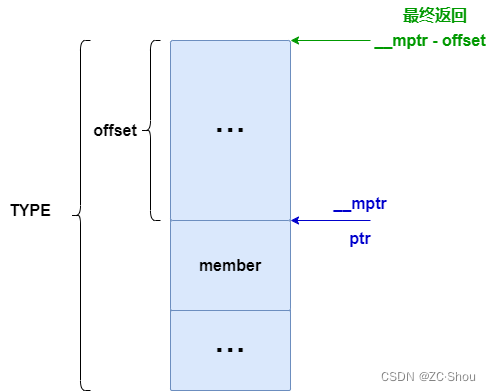
(type *)( (char *)__mptr - ((size_t) &((type *)0)->member) );
(char *)__mptr将成员类型强制转化为char *,这要地址进行加减时以字节为单位offsetof用于获取结构体成员偏移量。这是个巧妙用法,我们知道,结构体成员得地址减去结构体基地址就是偏移量。而如果这个基地址为 0 ,则直接取成员地址就是偏移量。(char *)__mptr - ((size_t) &((type *)0)->member)就是得到了type结构体变量的首地址,只不过类型是char*,最后使用(type *)在转换为type类型指针。
结论
container_of 最终的目的返回的就是 member 所在的结构体的基地址。简单来说,container_of 的作用就是根据结构体的成员获取结构体基地址。而 const typeof( ((type *)0)->member ) *__mptr = (ptr); 仅仅是个中间状态,如果没有这一句,就无法实现 container_of 的通用性(代替方案是使用类型强转,但是也就限定了只能用在特定类型中)。
初始化流程
DM 初始化的接口在 dm_init_and_scan 中,初始化流程主要有两次,入口函数分别是在重定位之前调用的 ./common/board_f.c 文件中的 static int initf_dm(void) 和在重定位之后调用的 ./common/board_r.c 文件中的 static int initr_dm(void)。重定位后的初始化与重定位前并没有太多区别。
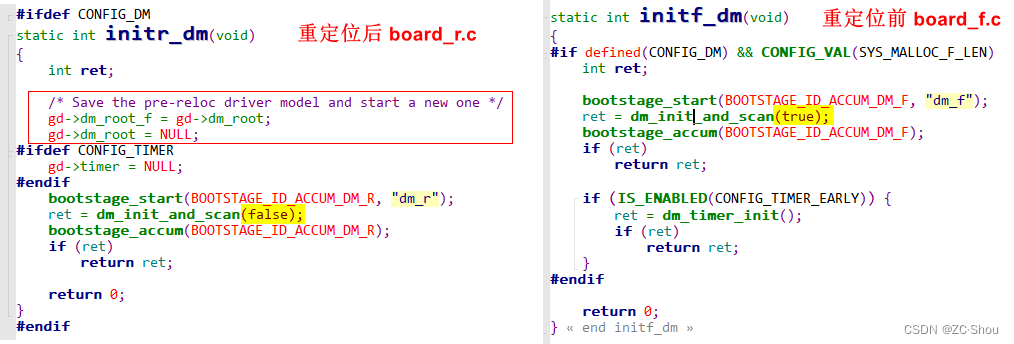
U-Boot 提供了 bootstage 记录每个阶段的执行时间等信息,可以将此记录信息报告给用户,并将其传递给操作系统进行日志记录/进一步分析。默认 bootstage 并没有启用,所以这里直接忽略。真正与 DM 初始化相关的是 dm_init_and_scan,接下来重点关注这个函数。
至于这里为啥还需要根据
CONFIG_TIMER_EARLY来初始化一个定时器暂时还不知道原因。
dm_init_and_scan
dm_init_and_scan 定义于 drivers/core/root.c 中,入参 pre_reloc_only 为 true 时表示只解析重定位之前的节点(只会对设备树中带有 u-boot,dm-pre-reloc 属性的节点或者带有 DM_FLAG_PRE_RELOC 标志的设备进行解析);pre_reloc_only 为 false 的时则会对所有节点都进行解析。
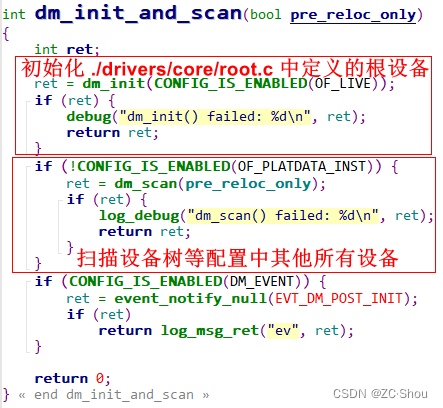
- 因为
of-platdata仅在SPL/TPL阶段可用,所以后续忽略所有of-platdata相关代码。DM_EVENT我这里默认也没有启用,直接忽略。
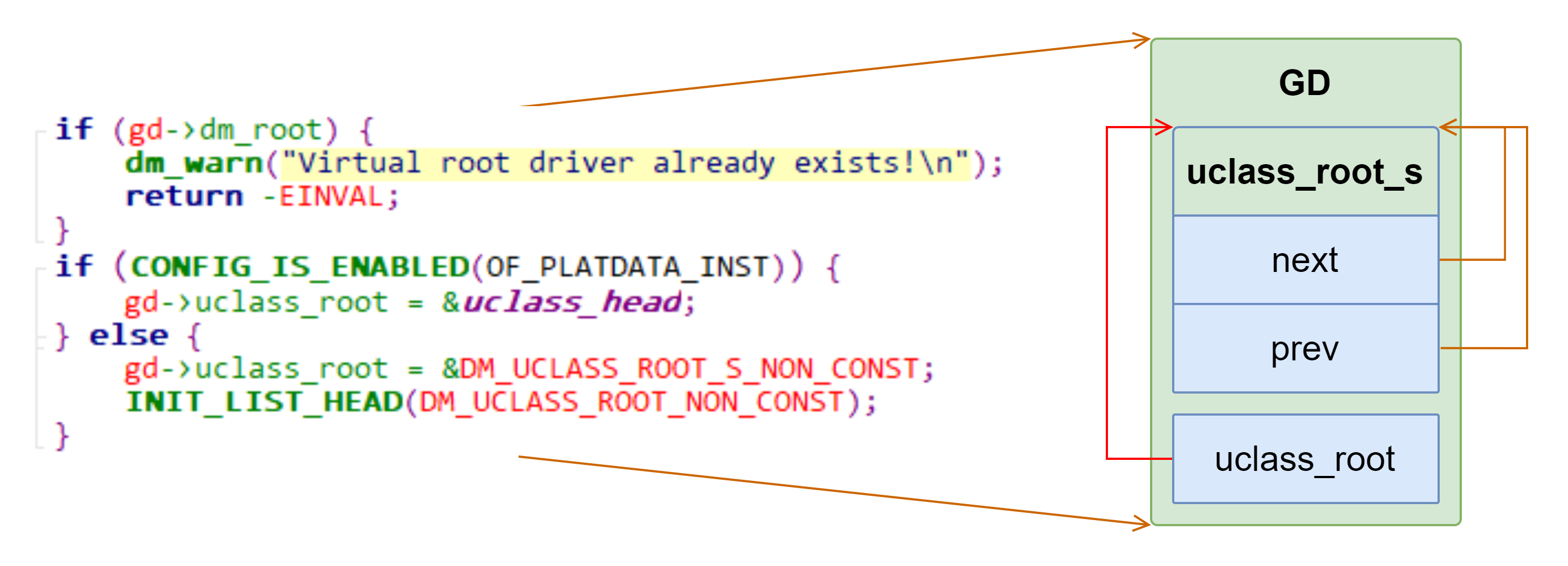
dm_init
dm_init 定义于 drivers/core/root.c 中,主要用于初始化 ./drivers/core/root.c 中定义的根设备(U_BOOT_DRIVER(root_driver))。 根设备不是通过设备树定义的,而是直接在代码中定义的,因此,它的初始化比较特殊。
所有设备都是根设备的子节点
dm_init 的入参 of_live 表示是否启用了 Live Device Tree,由源码可知该入参并没有被使用。Live Device Tree 是一个与 Flattened Device Tree 相对应的概念。主要用于加快启动的扫描时间,但是只能在重定位之后才能使用。
首先,将 gd->uclass_root 指向 gd->uclass_root_s,然后初始化 gd->uclass_root 中的成员:gd->uclass_root.next = gd->uclass_root 和 gd->uclass_root.prev = gd->uclass_root。
device_bind_by_name
device_bind_by_name 定义于 drivers/core/device.c 中,主要用于绑定那些不使用设备树定义的设备。这个接口用于创建一个设备并将其绑定到驱动程序。对于 DM 初始化来说,这里就会创建 ROOT 设备,并将设备与 ./drivers/core/root.c 中定义的 U_BOOT_DRIVER(root_driver) 绑定。
device_bind_by_name是个通用接口,其他设备初始化也会调用,见后文
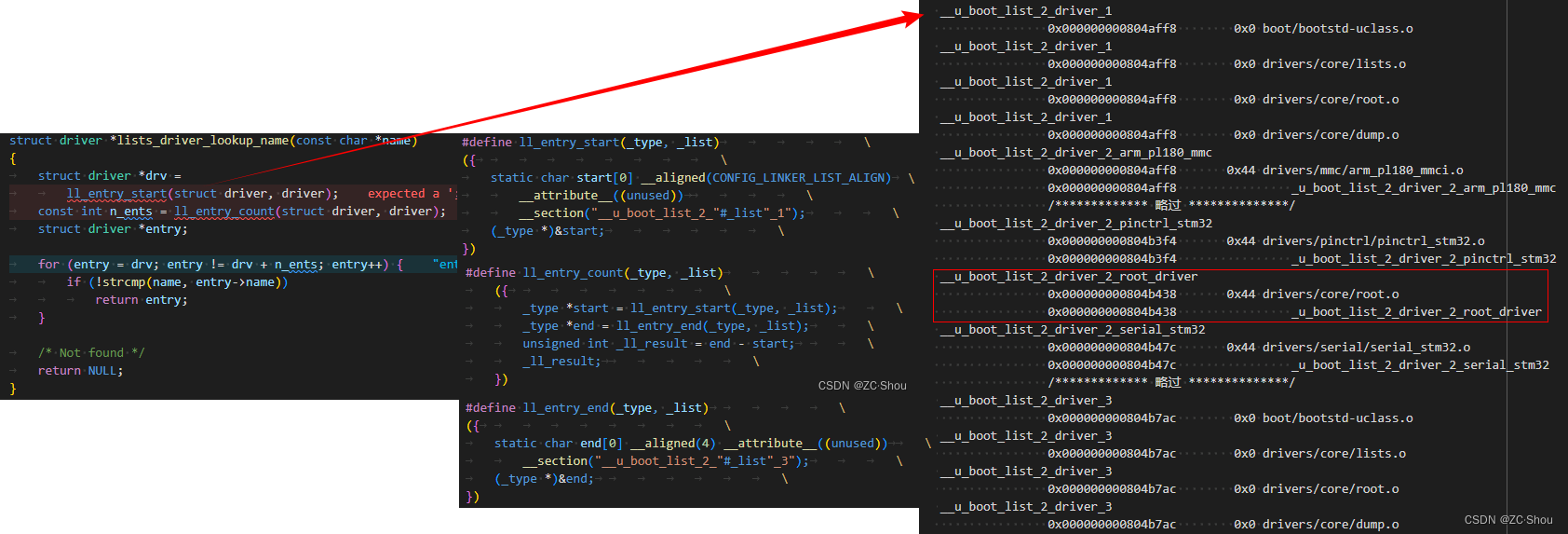
lists_driver_lookup_name
lists_driver_lookup_name 定义于 drivers/core/device.c 中,其会遍历所有 struct driver 对应的节区,从中匹配指定的驱动名字。这里的根设备的初始化,入参 name 就是与 ./drivers/core/root.c 中定义的 U_BOOT_DRIVER(root_driver) 中的 name 取值 root_driver,最终会返回基地址 0x804b438。
uclass_get
设备是需要归属 UCLASS 的,uclass_get 定义于 drivers/core/uclass.c 中,实现根据 udevice 中的 uclass id 遍历 gd->uclass_root 指向的 uclass 链表,返回找到的 uclass 地址,如果没有找到则会新建一个 uclass,并返回新建的 uclass 地址。
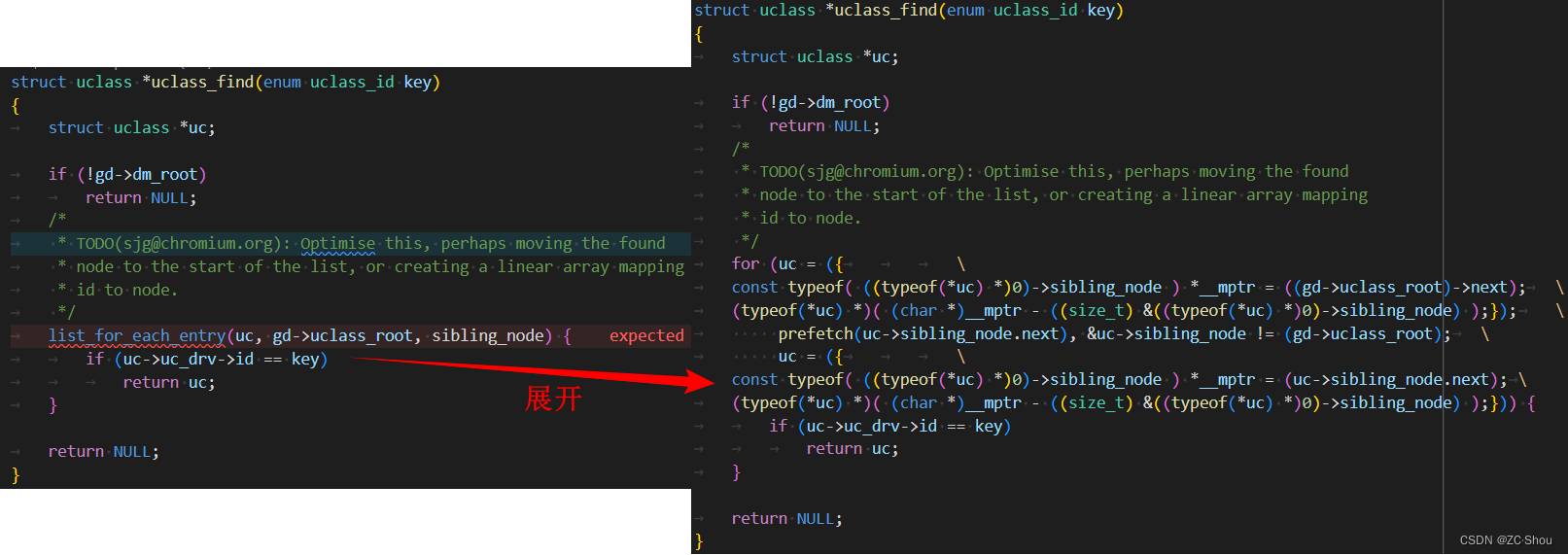
- 调用
uclass_find遍历gd->uclass_root指向的 uclass 链表,查找指定 id 的 uclass。对于 DM 初始化来说,由于gd->dm_root是 NULL,因此不会实际执行lis_for_each_entry;其他情况下,展开如下所示:
uclass_get是个通用接口,其他设备初始化也会调用,见后文
- 当找不到指定 id 的 uclass 时,调用
uclass_add新建一个 uclass- 调用
lists_uclass_lookup查找uclass_driver,返回找到的uclass_driver地址,否则返回错误
- 新建一个 uclass,然后进行一系列初始化,最终返回新建的 uclass。
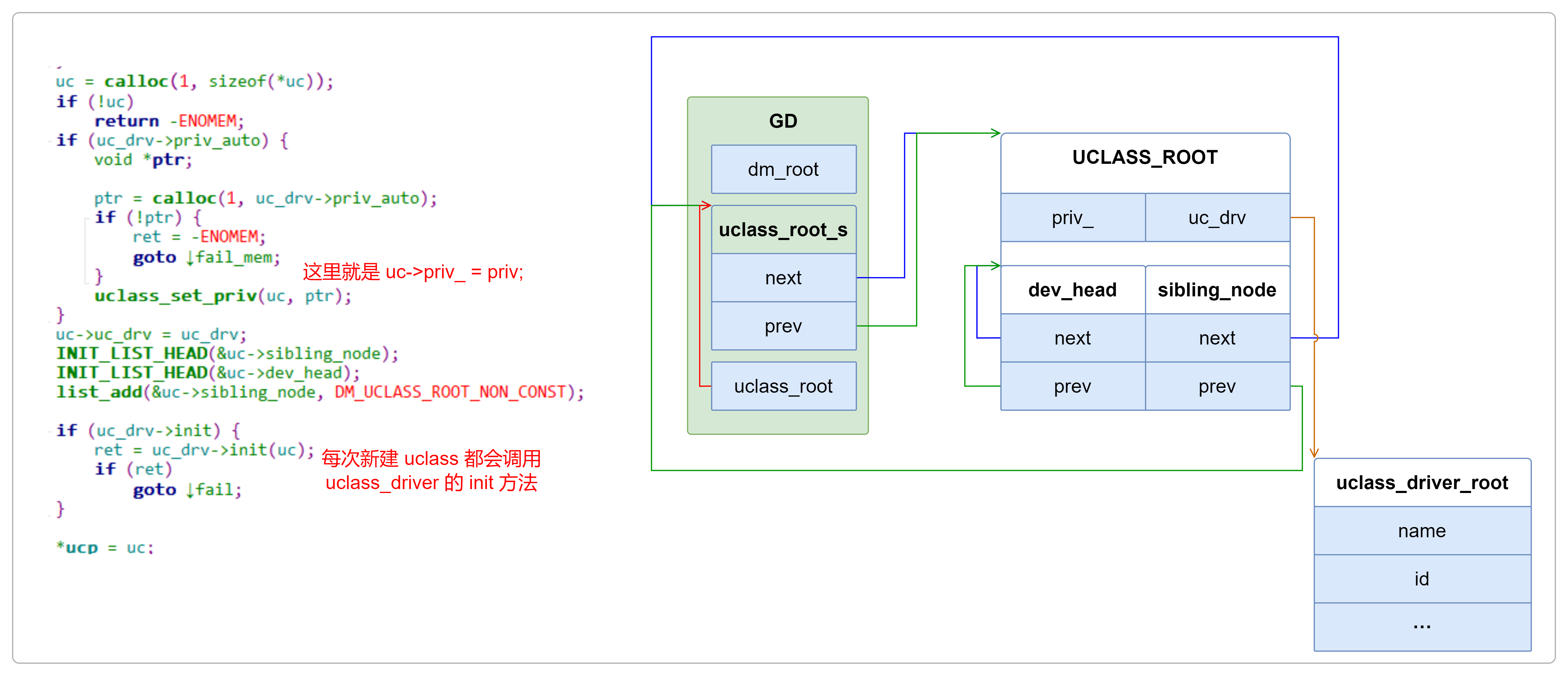
uc = calloc(1, sizeof(*uc));申请一个 UCLASS 节点内存- 判断
uclass_driver->priv_auto申请uclaas->priv_内存空间(接口uclass_set_priv就是一个简单的赋值语句uc->priv_ = priv;)。 INIT_LIST_HEAD()用于将dev_head和sibling_node中的指针指向自身list_add负责将申请的 UCLASS 节点内存串联到gd->uclass_root链表之上- 判断并调用当前
uclass对应的uclass_driver的init接口:uc_drv->init
- 调用
device_bind_common
device_bind_common 定义于 drivers/core/device.c/ 中,作用是将设备驱动、设备、UCLASS 三者(DM 初始化的 root_driver 设备 与 U_BOOT_DRIVER(root_driver)、UCLASS_ROOT )进行绑定,根据上面的初始化流程,只有存在一个设备驱动时,才会创建对应的设备。
- 调用
uclass_get根据设备 ID 查找对应的 UCLASS,详细过程参见上面的介绍。 dev = calloc(1, sizeof(struct udevice));申请一个udevice节点内存,即建立一个设备(DM 初始化中,这里就会建立ROOT DEVICE),然后初始化其中的链表节点。
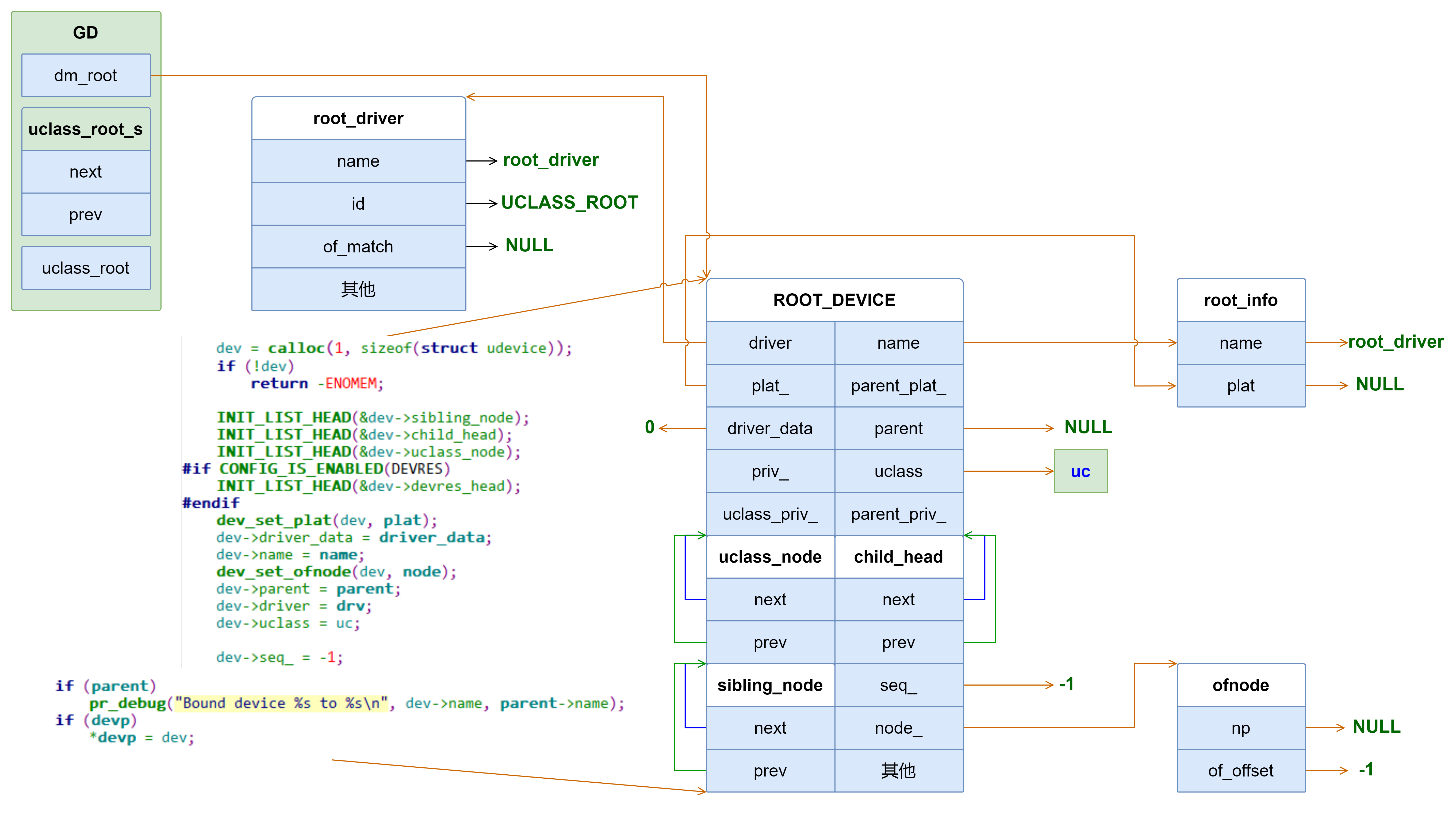
INIT_LIST_HEAD用于将各链表节点指向自身dev_set_plat就是dev->plat_ = plat;- 有些设备(如 SPI 总线、I2C 总线和串口)使用别名进行编号。因此需要从设备树节点中提取出来放到
dev->seq_中。

- 初始化当前设备的使用的一些内存,例如 设备的的
plat_。/* Check if we need to allocate plat */ if (drv->plat_auto) { /* 当驱动中 将 plat_auto 设置为实际的 platform data 的大小 */ bool alloc = !plat; /* plat 是入参,如果入参指定了,则就不会在分配驱动中 drv->plat_auto 的内存空间 */ /* * For of-platdata, we try use the existing data, but if * plat_auto is larger, we must allocate a new space */ if (CONFIG_IS_ENABLED(OF_PLATDATA)) { if (of_plat_size) dev_or_flags(dev, DM_FLAG_OF_PLATDATA); if (of_plat_size < drv->plat_auto) alloc = true; } if (alloc) { dev_or_flags(dev, DM_FLAG_ALLOC_PDATA); ptr = calloc(1, drv->plat_auto); /* 分配内存 */ if (!ptr) { ret = -ENOMEM; goto fail_alloc1; } /* * For of-platdata, copy the old plat into the new * space */ if (CONFIG_IS_ENABLED(OF_PLATDATA) && plat) memcpy(ptr, plat, of_plat_size); dev_set_plat(dev, ptr); /* dev->plat_ = plat; */ } } - 当前设备可以选择将对应的 UCLASS 中的一些平台数据保存到自己的
uclass_plat_中。如果对应的uclass->per_device_plat_auto不是 0,则申请内存,并调用dev_set_uclass_plat(dev, ptr);赋值dev->uclass_plat_ = uclass_plat;指向申请的内存。size = uc->uc_drv->per_device_plat_auto; if (size) { dev_or_flags(dev, DM_FLAG_ALLOC_UCLASS_PDATA); ptr = calloc(1, size); if (!ptr) { ret = -ENOMEM; goto fail_alloc2; } dev_set_uclass_plat(dev, ptr); } - 如果当前设备存在父节点设备的话,则初始化父节点设备的
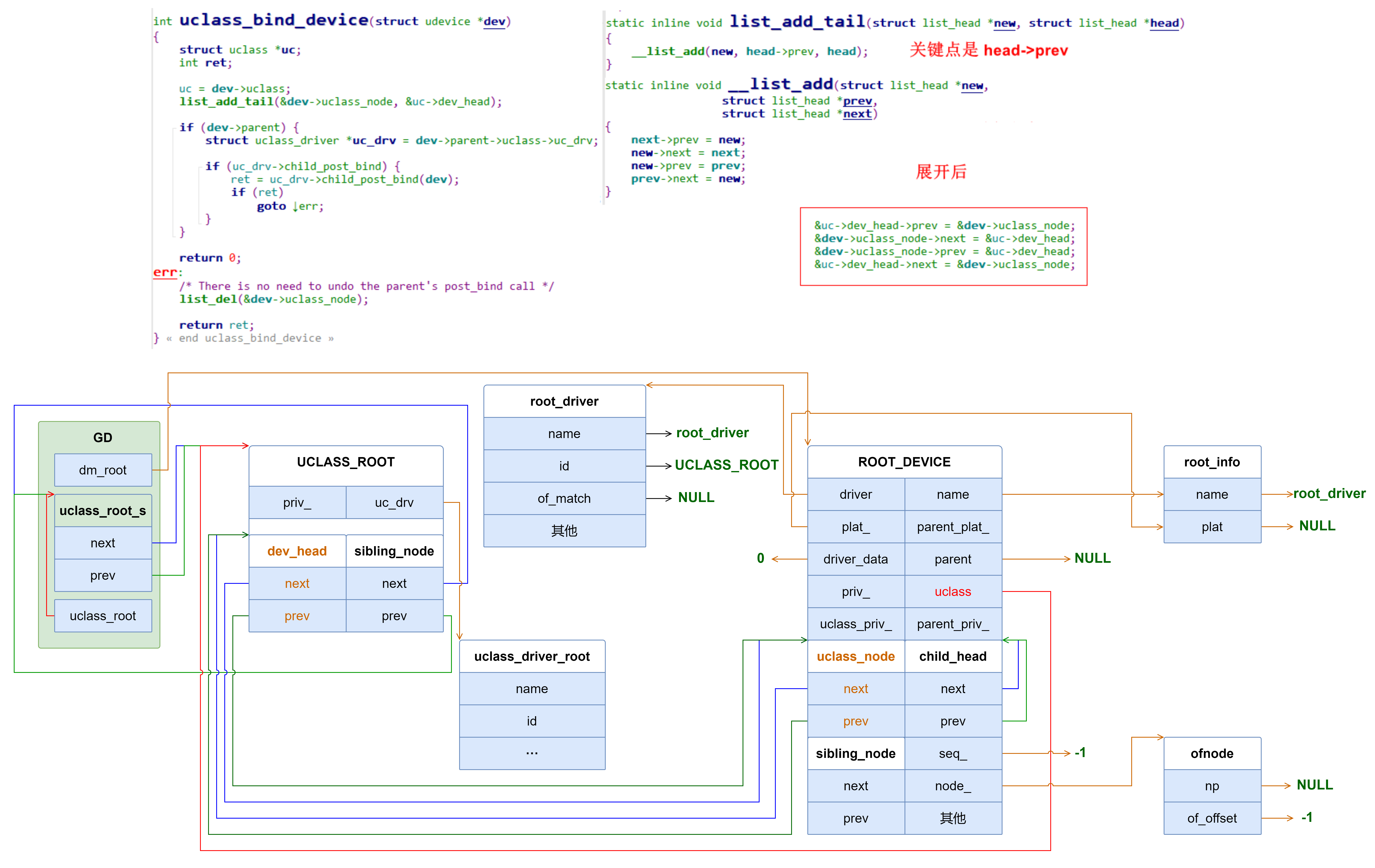
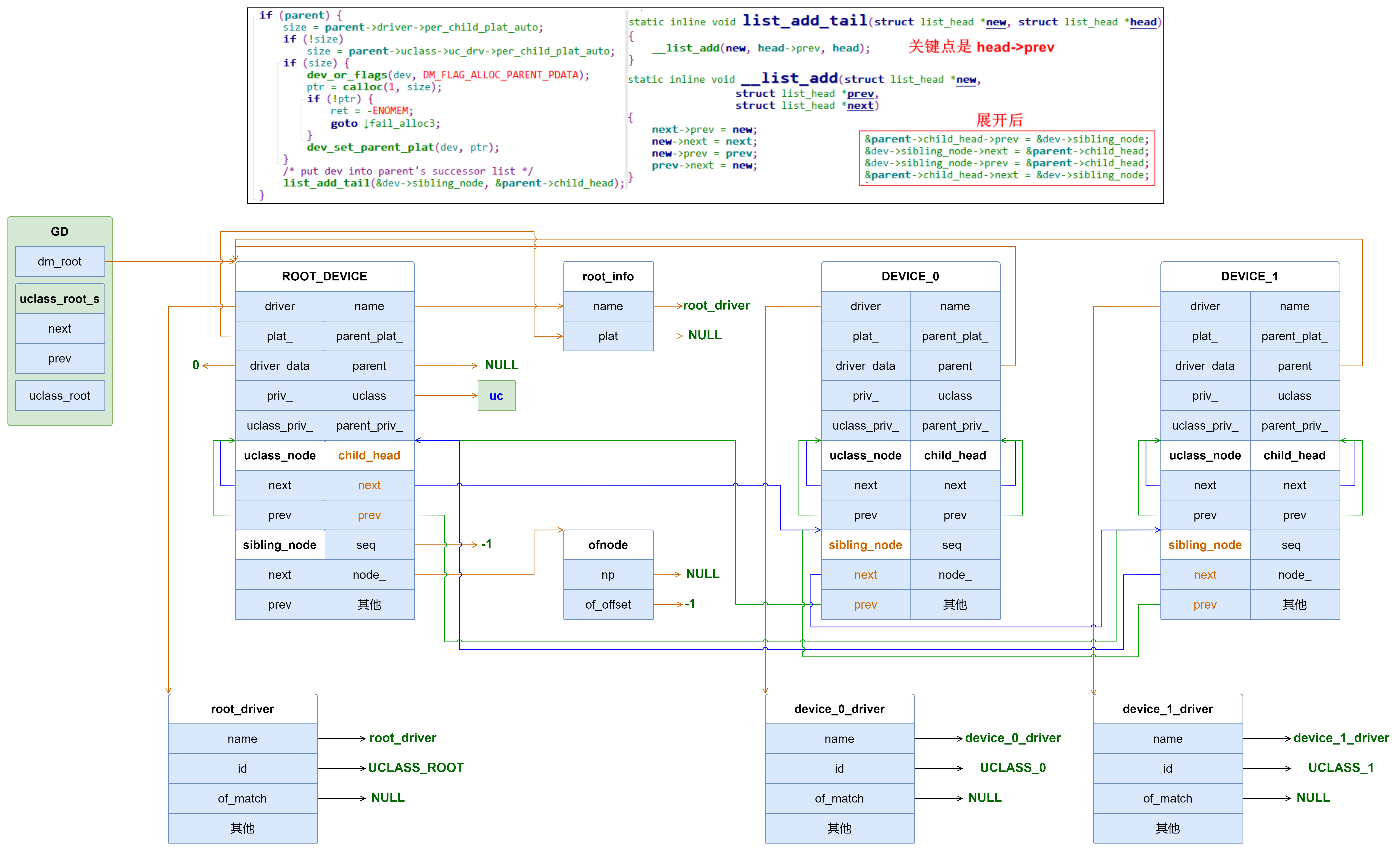
per_child_plat_auto,然后调用list_add_tail将新的设备添加到其父节点设备。对于我们的 ROOT 设备,其 parent 是 NULL,因此不需要添加。parent 不是 NULL 时,就会通过child_head和sibling_node这两个成员把设备串到 Parent 上,后文有详细图示。 - 调用
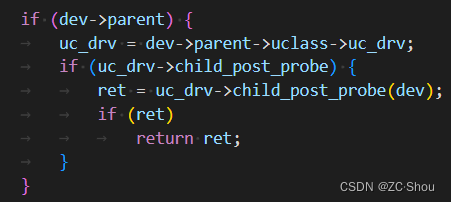
uclass_bind_device将上面创建的设备添加到 UCLASS,同时,如果设备存在父设备的话,需要调用父设备的child_post_bind方法(对于这里的 DM 初始化,根设备没有父设备)。直接上图:
- 调用当前设备对应驱动的
bind方法完成设备与对应驱动的绑定,然后调用当前设备对应的父设备的child_post_bind(这里与uclass_bind_device中其实存在重复),最后调用当前设备对应的 UCLASS(对应的 uclass_driver) 的post_bind方法

device_bind_common是个通用接口,其他设备初始化也会调用,见后文
dev_set_ofnode
OF_CONTROL 表示是否启用了设备树,这个默认是启用的,因此会继续调用定义于 drivers/core/device.c 中的 dev_set_ofnode,将根设备中 node_ 指向根节点

device_probe
device_probe 定义于 drivers/core/device.c 中,用于激活一个设备以便它可以随时使用,为了节省资源,U-Boot 中的设备会被延迟探测。如果设备已经激活了,则直接返回。对于 DM 初始化来说,这里就是探测并激活根设备。
- 调用
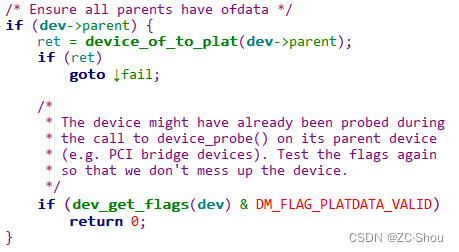
device_of_to_plat将 dts 中的信息转化为设备的平台数据,以便提供探测设备等操作所需的信息。这可能会导致一些其他设备被探测,如果这个设备依赖于它们,例如一条 GPIO 线将导致一个 GPIO 设备被探测。- 如果当前设备有父设备,则递归执行父设备的
device_of_to_plat
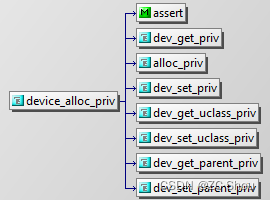
- 调用
device_alloc_priv分配私有数据使用的内存
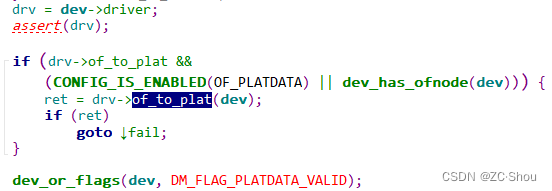
- 调用设备对应的驱动自己的
of_to_plat,将设备树中描述的设备信息,转化为一个平台数据(存储于udevice ->plat_指向的内存中),后续驱动在使用使用硬件时就从平台数据中获取相关资源。
- 如果当前设备有父设备,则递归执行父设备的
- 如果该设备存在 parent,那么先 probe parent 设备,确保所有的父设备都被 probed。直接递归
device_probe实现
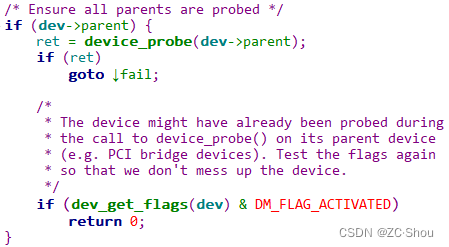
- 调用
device_get_dma_constraints填充设备的 DMA 约束。从固件中获取设备的 DMA 约束。驱动程序后来使用此信息将物理地址转换为设备的总线地址空间。目前,仅支持设备树。 - 调用
uclass_pre_probe_device执行探测设备前当前设备对应的 uclass(对应的 uclass_driver) 中需要执行的接口。- 当前设备对应的 uclass(对应的 uclass_driver) 中的
pre_probe()方法
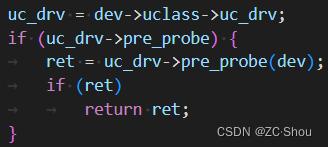
- 当前设备的父设备对应的 uclass(对应的 uclass_driver) 中的
child_pre_probe()方法
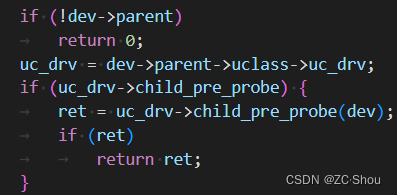
- 当前设备对应的 uclass(对应的 uclass_driver) 中的
- 调用当前设备的父设备的
child_pre_probe。 - 调用
dev_has_ofnode只处理具有有效 ofnode 的设备 - 执行该设备的 driver 的 probe 函数,真正激活该设备。
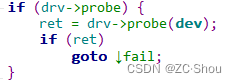
- 调用
uclass_post_probe_device执行探测设备后 uclass(对应的 uclass_driver)中需要执行的接口。这包括 uclass_driver 的post_probe()方法和父 uclass(对应的 uclass_driver) 的child_post_probe()方法。- 当前设备的父设备对应的 uclass(对应的 uclass_driver) 中的
child_post_probe()方法
- 当前设备对应的 uclass(对应的 uclass_driver) 中的
post_probe()方法

- 当前设备的父设备对应的 uclass(对应的 uclass_driver) 中的
device_probe是个通用接口,其他设备初始化也会调用,见后文
dm_scan
dm_scan 定义于 drivers/core/root.c 中,负责初始化根设备之外的所有设备。 前面说过,U-Boot 支持 Platform Data(代码中常简称 plat)和 Flattened Device Tree(代码常简称 fdt)这两种驱动配置的基本方式。因此,这里必须处理这两种驱动定义的设备。
dm_scan_plat
dm_scan_plat 定义于 drivers/core/root.c 中,查找并绑定使用 U_BOOT_DRVINFO(__name) 直接定义的设备。U_BOOT_DRVINFO(__name) 定义于 ./include/dm/platdata.h 中,与 U_BOOT_DRIVER(__name) 类似,U_BOOT_DRVINFO(__name) 除了使用 struct driver_info 定义变量 __name,也会同时定义一个同名节区,并将 __name 放到此节区中。

dm_scan_plat 实际就是遍历 driver_info 表(__u_boot_list_2_driver_info_1 到 __u_boot_list_2_driver_info_3 之间),然后以 driver_info 中的 name 成员去查找使用 U_BOOT_DRIVER(__name) 定义的驱动程序。
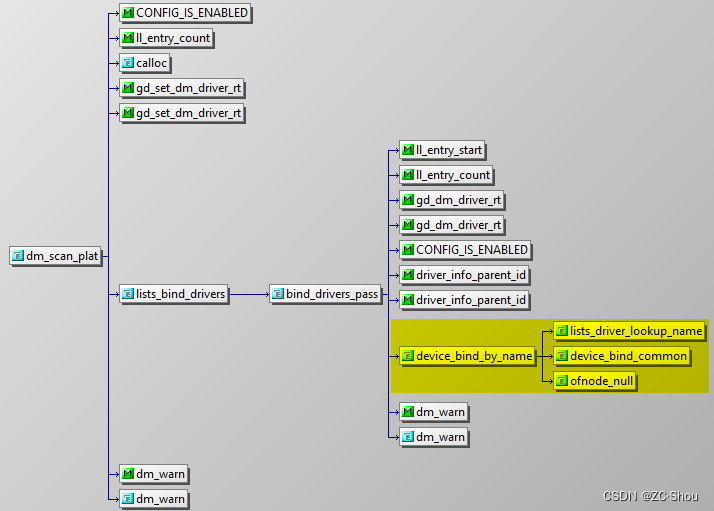
udevice 的建立、driver 的绑定、UCLASS 的建立、uclass_driver 的绑定与上面的 root 设备一样,其内部最终也是调用 device_bind_by_name 完成这一些列的动作(调用 device_bind_by_name 时传参不同而已)。

注意,所有节点都是以 gd->dm_root 为父节点!!!
dm_extended_scan
dm_extended_scan 定义于 drivers/core/root.c 中,处理设备树中定义的设备。根据源码,dm_extended_scan 主要包含两部分,首先,通过 dm_scan_fdt 处理设备树中的设备节点;其次,由于有些节点(/chosen、/clocks、/firmware)本身不是设备,但可能包含一些设备。此时通过 dm_scan_fdt_ofnode_path 来挨个处理这些节点中的设备。

ofnode_root 就是根节点(of_offset=0),而 ofnode_path 这是根据完整的路径来查找指定的设备树节点的,这两部分最终都是提供过 dm_scan_fdt_node 来处理节点设备的,因此我们只需要重点关注 dm_scan_fdt_node 即可。
dm_scan_fdt_node
dm_scan_fdt_node 定义于 drivers/core/root.c 中,实现扫描设备树,为节点绑定驱动。它会给绑定的设备树节点创建一个新 udevice,并使用入参 parent 作为其父设备(入参固定为 gd->dm_root,也就是根设备)。
dm_scan_fdt_node 会从根节点开始,依次遍历所有子节点。由于根设备已经在前面单独初始化了,所以这里找的设备就是根节点下的第一个设备,然后使用 lists_bind_fdt 挨个对节点进行绑定(这里的绑定即将节点与对应的 udevice、driver、uclass、uclass_driver 关联起来)。
for (node = ofnode_first_subnode(parent_node); /* 以根节点开始,获取第一个子节点 */
ofnode_valid(node);
node = ofnode_next_subnode(node)) { /* 当前节点的子节点 */
const char *node_name = ofnode_get_name(node); /* 节点名字 */
if (!ofnode_is_enabled(node)) {
pr_debug(" - ignoring disabled device\n");
continue;
}
err = lists_bind_fdt(parent, node, NULL, NULL, pre_reloc_only); /* 绑定 udevice、driver、uclass */
if (err && !ret) {
ret = err;
debug("%s: ret=%d\n", node_name, ret);
}
}
lists_bind_fdt
lists_bind_fdt 内部会创建一个 udevice,然后将 udevice 与当前节点(入参 node)进行绑定。当然,创建 udevice 的同时,其对应的 driver,uclass、uclass_driver 都会进行绑定。
- 获取当前节点的
compatible内容(基地址 + 长度) - 遍历
compatible,然后挨个去driver表(__u_boot_list_2_driver_1到__u_boot_list_2_driver_3之间)中去对比(节点的compatible与 驱动中的of_match匹配)。代码很简单,就是个两层循环
只要有匹配,则调用for (i = 0; i < compat_length; i += strlen(compat) + 1) { compat = compat_list + i; log_debug(" - attempt to match compatible string '%s'\n", compat); for (entry = driver; entry != driver + n_ents; entry++) { if (drv) { if (drv != entry) continue; if (!entry->of_match) break; } ret = driver_check_compatible(entry->of_match, &id, compat); if (!ret) break; }device_bind_with_driver_data➜device_bind_common完成udevice的建立、driver 的绑定、UCLASS 的建立、uclass_driver 的绑定(调用device_bind_common时传参不同而已)。

注意,所有节点都是以gd->dm_root为父节点!!!这样所有节点都会通过 parent 串起来。此外,device_bind_common的入参 plat 是 NULL,也就是来自设备树的设备其 plat 数据都是后续重设备树提取的
dm_scan_other
dm_scan_other 定义于 drivers/core/root.c 中,用于搜索绑定其他特殊的设备。该函数是个 __WEAK 函数,没有实质内容,如果需要,必须自行实现。 例如,在 ./lib/efi/efi_app.c 和 ./boot/bootstd-uclass.c 中就有该接口的实现,用于添加额外的设备。
dm_probe_devices
dm_probe_devices 定义于 drivers/core/root.c 中,实现遍历 gd->dm_root 下的所有设备然后激活设备。前面说了,udevice 是使用其中的 child_head 和 sibling_node 这两个成员串联起来的,所以,这个接口很简单,通过递归 child_head 就可以变量所有设备了。
- 调用
device_probe探测激活当前设备,这个流程和上面说的 ROOT 设备是一样的。 - 调用
list_for_each_entry(child, &dev->child_head, sibling_node)递归后续子设备,如下是展开后的基本形式

参考
- https://blog.csdn.net/ZHONGCAI0901/article/details/117781158
- https://zhuanlan.zhihu.com/p/460754843
- https://www.cnblogs.com/YYFaGe/p/16672483.html
- https://blog.csdn.net/weixin_41028621/article/details/90643550
- https://blog.csdn.net/ooonebook/article/details/53234020
- https://u-boot.readthedocs.io/en/latest/develop/driver-model/design.html
![[牛客网] HJ35 蛇形矩阵(写了好久才写出来)](https://img-blog.csdnimg.cn/img_convert/80d01f56b0444a6a8dc055e3702c3241.png)


![[SQL]增删查改语法概览](https://img-blog.csdnimg.cn/img_convert/d10a154046e85e775e87731972b922ef.png)