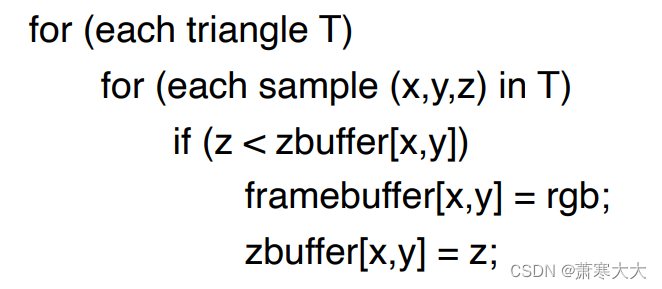
1.深度测试(Z-Buffer )
每个像素需要一个深度来排序是否需要渲染,所以需要额外的buffer来存储,frame buffer 存颜色,depth buffer (z-buffer) 存深度。
2.Lambert(漫反射)

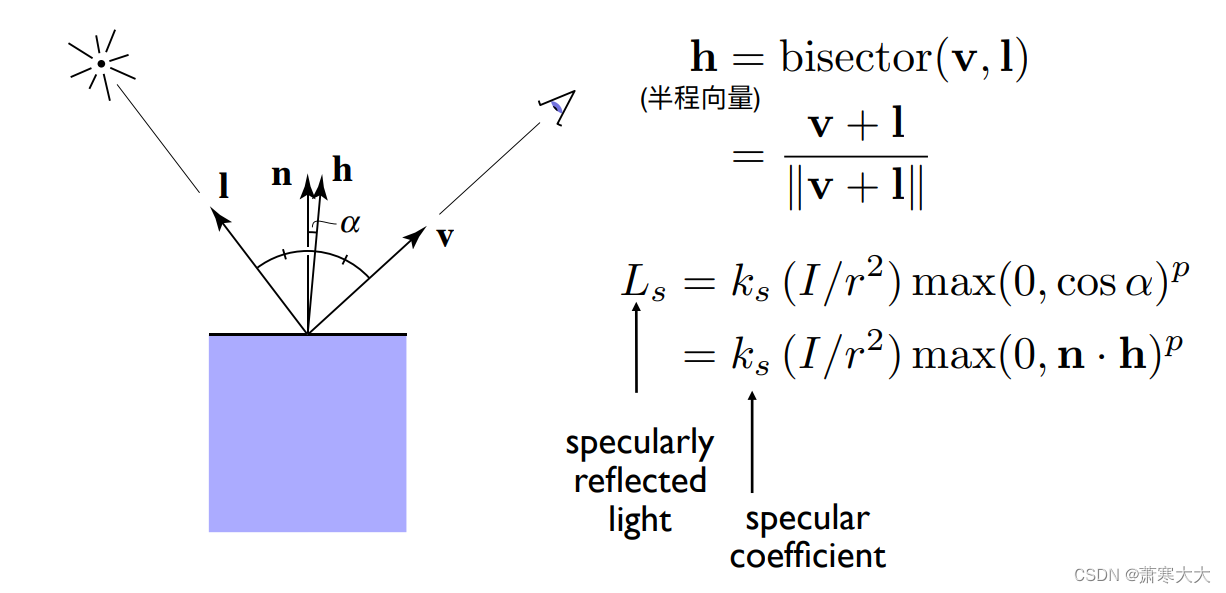
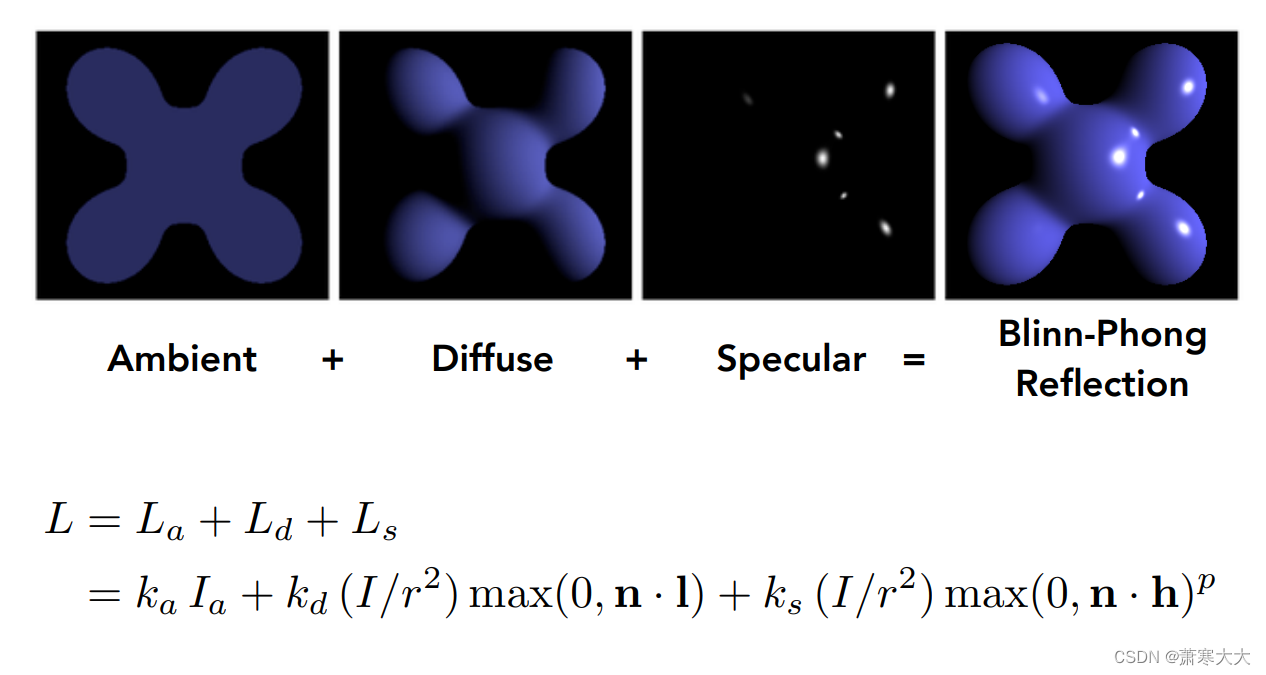
3.Blinn-Phong (高光)
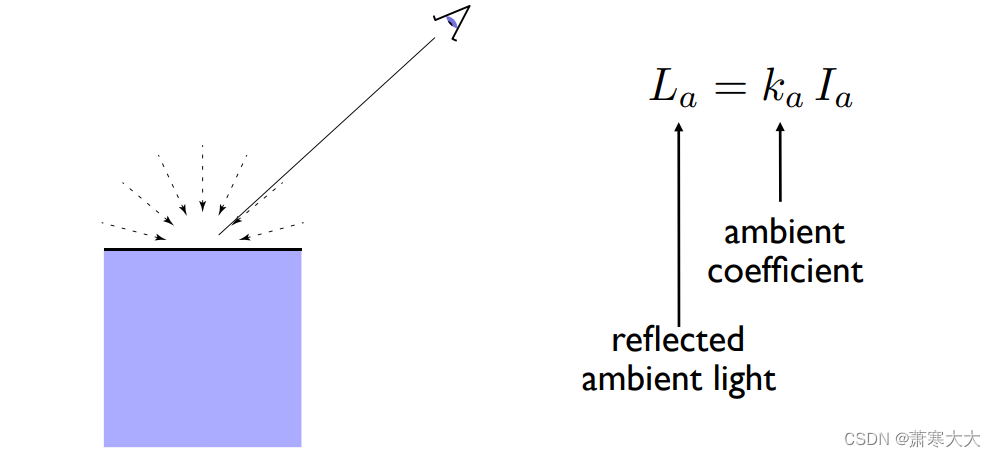
4.环境光(理想接近)
5.Blinn-Phong 光照模型
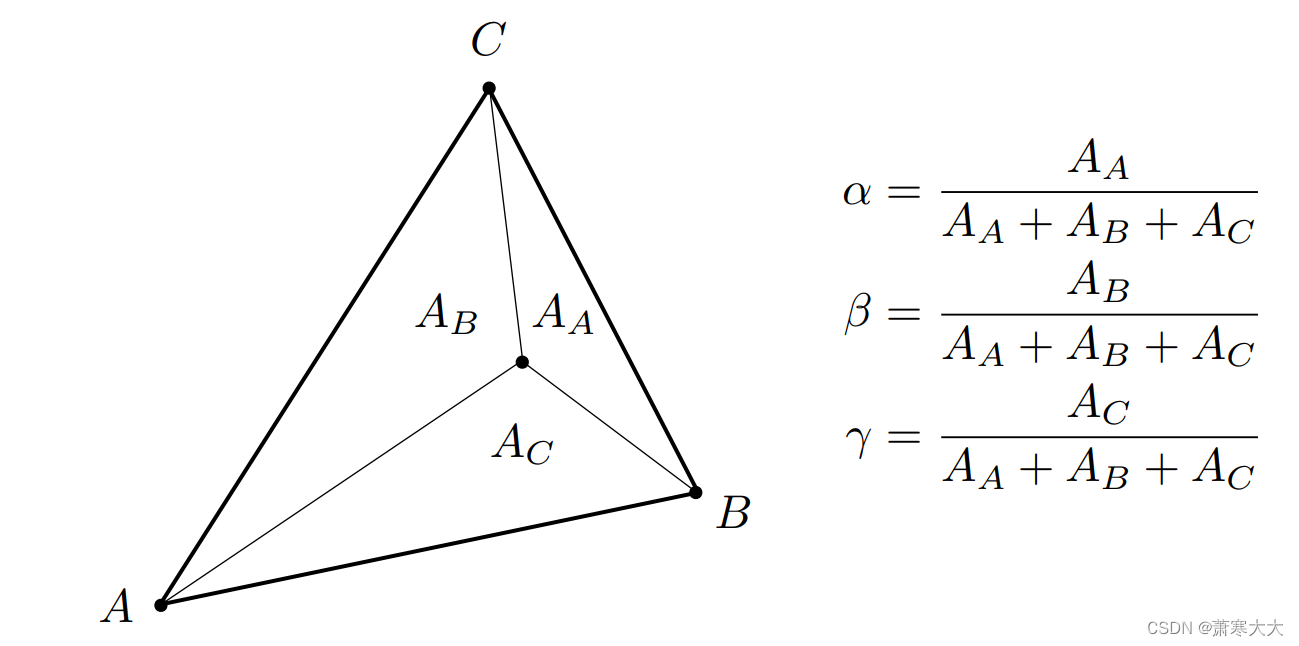
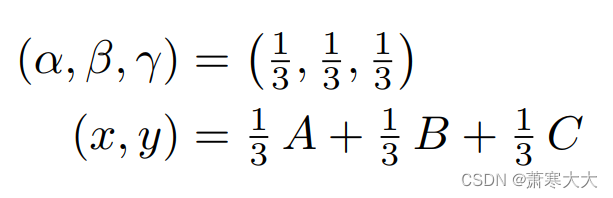
6.三角形重心坐标(插值计算使用)

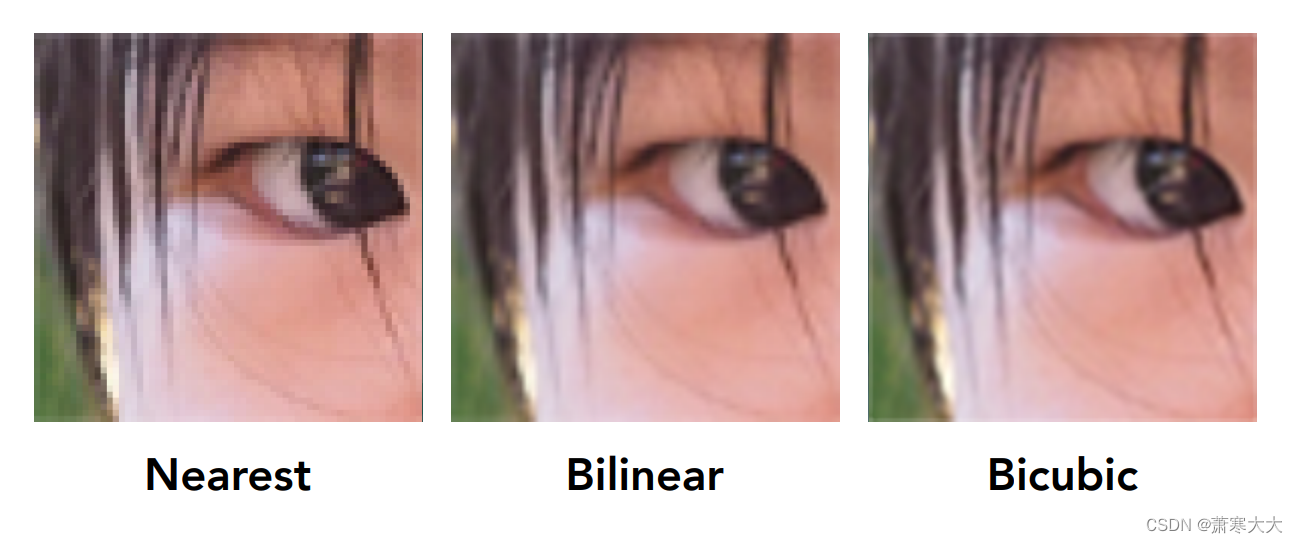
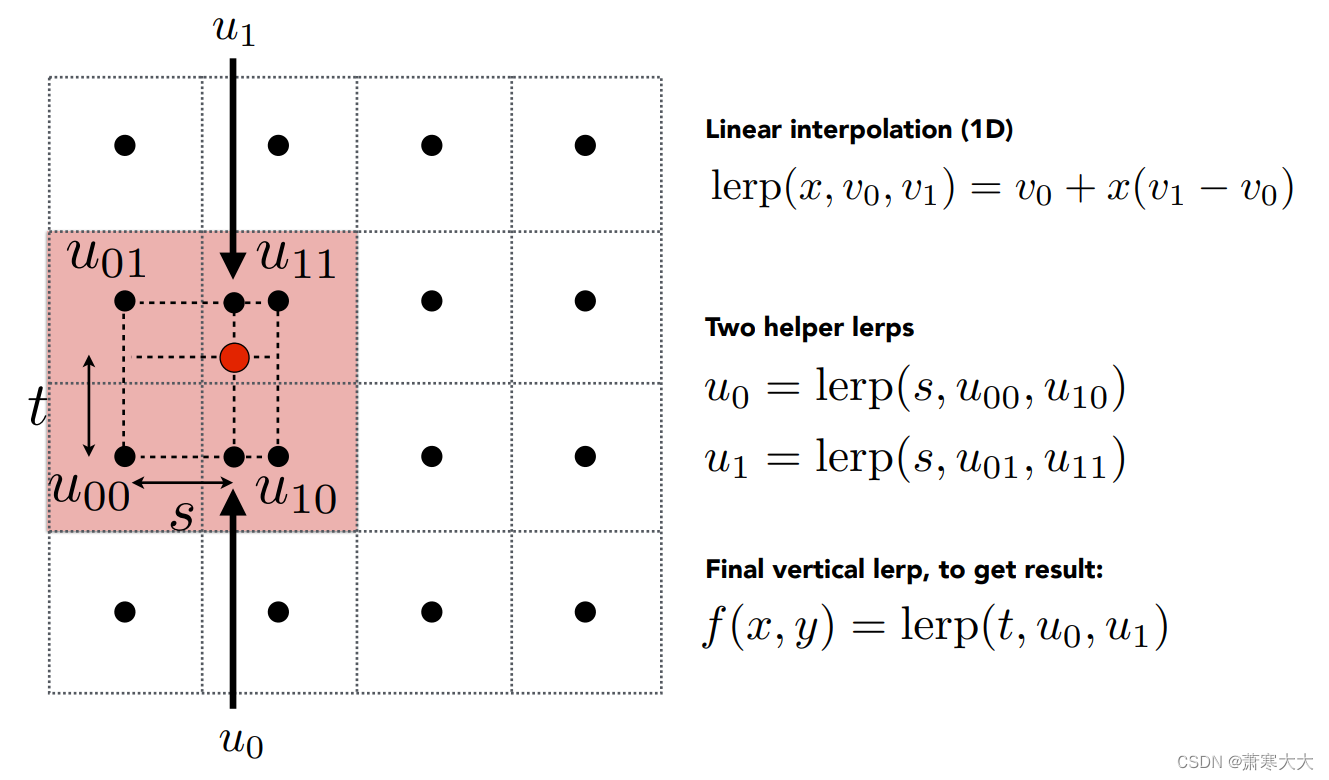
7.简单纹理映射(双线性插值,三线性插值)
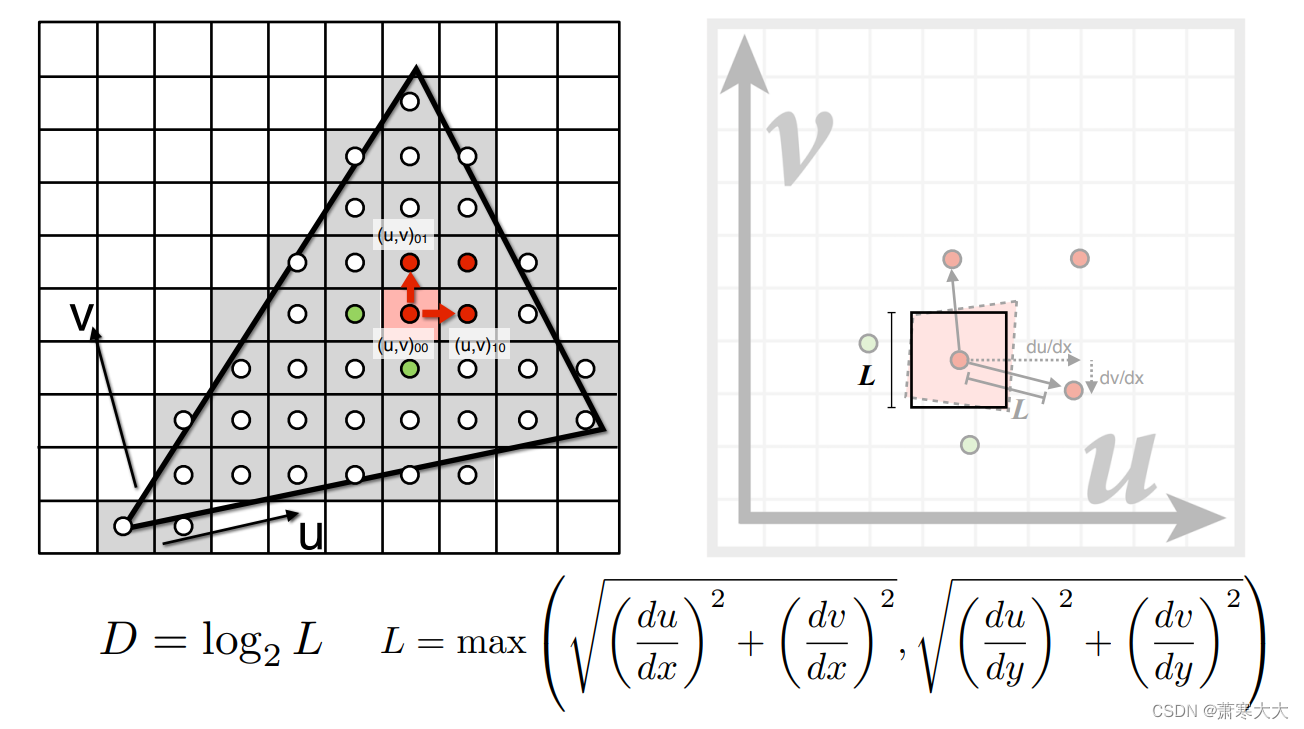
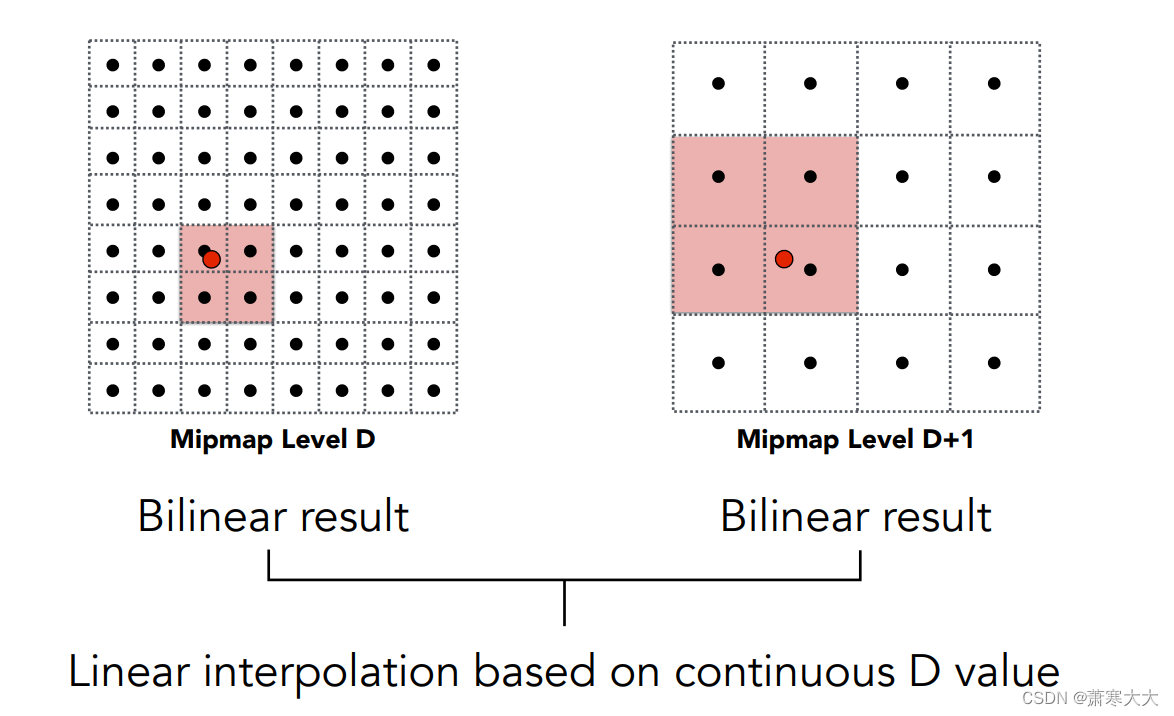
8.Mipmap(内存多占1/3)

根据相邻两点在各个纹理层上的最大距离得到在第几层
三线性插值平滑过渡
9.RipMap(各向异性过滤)内存多占3倍