本文主要介绍如何在STM32中使用microros与ROS2进行通信,在ROS1中标准的库是rosserial,在ROS2中则是microros,目前网上的资料也有一部分了,但是都没有提供完整可验证的demo,本文将根据提供的demo一步步给大家进行演示。
1、首先如果你用的不是STM32F4的话,则需要自己去生成micro_ros_stm32cubemx_utils库,博文demo使用的硬件是STM32F407芯片,提供的micro_ros_stm32cubemx_utils库也是F4的,工程目录如下图所示:
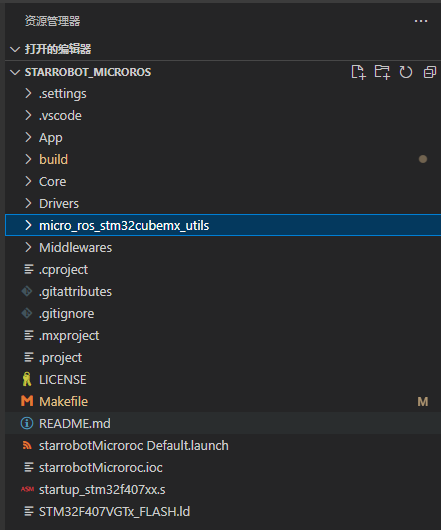
工程使用STM32CubeMX软件进行端口硬件等代码的初始化,大家在开发中可以对stattobotMicroros.ioc文件进行编辑,本文不对STM32CubeMX的使用进行讲解,大家可以自行百度学习。
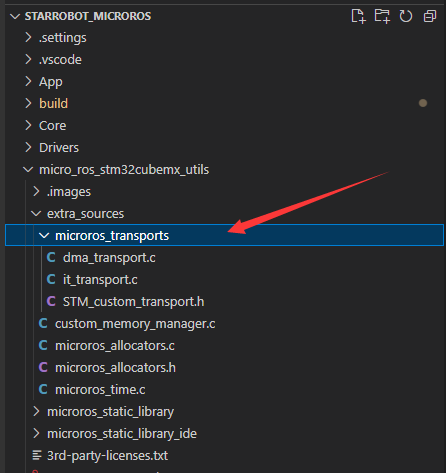
2、micro_ros_stm32cubemx_utils使用提供了中断读写和DMA读写的接口,大家根据自己实际使用的端口对文件,dma_transports.c,it_transport.c
3、microros_tasks.c是microsros初始化和节点发布订阅的文件,
void starrobot_microros_init(void){
MX_USART1_UART_Init();
rmw_ret_t status = rmw_uros_set_custom_transport(
true,
(void *) &huart1,
cubemx_transport_open,
cubemx_transport_close,
cubemx_transport_write,
cubemx_transport_read);
rcl_allocator_t freeRTOS_allocator = rcutils_get_zero_initialized_allocator();
freeRTOS_allocator.allocate = microros_allocate;
freeRTOS_allocator.deallocate = microros_deallocate;
freeRTOS_allocator.reallocate = microros_reallocate;
freeRTOS_allocator.zero_allocate = microros_zero_allocate;
if (!rcutils_set_default_allocator(&freeRTOS_allocator)) {
printf("Error on default allocators (line %d)\n", __LINE__);
}
}该函数主要是对硬件进行注册绑定,使用的硬件,打开、关闭、读写、函数与microros的接口进行绑定。
void run_starrobotSTM_node(void){
// initial configurations
starrobot_microros_init();
init_starrobotSTM_node();
create_starrobotSTM_publisher();
create_starrobotSTM_subscriber();
// timer for publisher
rcl_timer_t timer_pub;
RCCHECK(rclc_timer_init_default(
&timer_pub,
&support,
RCL_MS_TO_NS(5),
publisher_callback));
// create executor
executor = rclc_executor_get_zero_initialized_executor();
RCCHECK(rclc_executor_init(&executor, &support.context, 2, &allocator));
RCCHECK(rclc_executor_add_timer(&executor, &timer_pub));
RCCHECK(rclc_executor_add_subscription(&executor, &subscriber, &sub_msg, &subscription_callback, ON_NEW_DATA));
// spin node by executor
while(1){
rcl_ret_t rc = rclc_executor_spin(&executor); //, RCL_MS_TO_NS(100)
if (rc != RCL_RET_OK){
break;
}
}
// rclc_executor_fini(&executor);
}
该函数是整个节点的封装函数,包含了注册绑定硬件和创建发布、订阅节点。
大家下载demo包后,需要先在vscode中配置开发ARM的环境,然后make jflash进行编译下载即可;下载完成后打开ROS2端运行Agent 指令:<sudo docker run -it --rm -v /dev:/dev -v /dev/shm:/dev/shm --privileged --net=host microros/micro-ros-agent:$ROS_DISTRO serial --dev /dev/ttyUSB0 -v>,使用<ros2 node list> <ros2 topic list> <ros2 topic info /topic_name>查看发布的节点信息和数据。
相关demo代码下载地址:https://gitee.com/starRureole/starrobot_microros.git
如果大家有CSDN积分,想支持一下博主的,可以在CSDN上下载:https://download.csdn.net/download/qq_36349536/87500333
同时也欢迎大家进群一起交流学习:129923584
相关视频讲解链接:https://www.bilibili.com/video/BV1bD4y1g7V5/
博文使用的开发板购买链接:https://item.taobao.com/item.htm?spm=a1z10.1-c-s.w4004-21142386790.2.c0086177uv5IlA&id=606445592295