作者 | 初光
出品 | 车端
备注 | 转载请阅读文中版权声明
知圈 | 进“汽车电子与AutoSAR开发”群,请加微“cloud2sunshine”
总目录链接==>> AutoSAR入门和实战系列总目录
Tesla MOdelS/X 中有 60 多个处理器。其他型号的处理器较少,但数量仍然不少。
在这里,我们将重点关注两个处理器模块:媒体控制单元 (MCU)和自动驾驶ECU处理器,这两个模块经常混淆它们的功能。
01 媒体控制单元 (MCU:Media Control Unit)
媒体控制单元MCU是指2021年1月前Tesla MOdelS/Tesla MOdelX仪表盘中央带触控显示屏的电脑模块,或2021年1月后Tesla MOdel3/Y和Tesla MOdelS/X的主电脑模块。
该模块包括处理器、RAM、非易失性存储器、音频子系统、音频放大器、WiFi、蜂窝、蓝牙、GPS、以太网桥、多个 CAN 总线通信、LIN 总线、USB 端口等。
MCU负责可视化、所有外部通信、音频、蜂窝、导航和设置。除了设置之外,它与Autopilot的驾驶能力关系不大。
Tesla MOdelS/X中的MCU有3个版本:
MCU1
MCU1——从开始生产到 2018 年 2 月生产的所有 S/X 汽车都使用 Nvidia 四核处理器。特斯拉现在提供从 MCU1 切换到 MCU2 的改装选项。
实际上有两个 MCU1 变体,具有不同的连接器。两种变体的内部构造基本相同。红色箭头表示连接器的变化。不再制造旧的1004777。对于旧车,较新的 1045006 零件可与适配器一起使用。一些最早的1004777 MCU只有3G,没有LTE。特斯拉为那些需要 LTE 的用户提供付费升级,这会改变 MCU1 中的一个模块。所有 1045006 变体都包括 LTE。

MCU2
MCU2——使用英特尔多核 Atom 处理器,该 MCU 于 2018 年 3 月开始在 S/X 中发货。MCU2 提供 snapper 操作、5 GHz WiFi、更新的蓝牙版本和附加天线(MCU2 外部),以及其他小的变化。
如果您想确认您的 S/X 有哪个 MCU,我们创建了一个 MCU 测试仪。在车上浏览器输入:TeslaTap.com/mcu
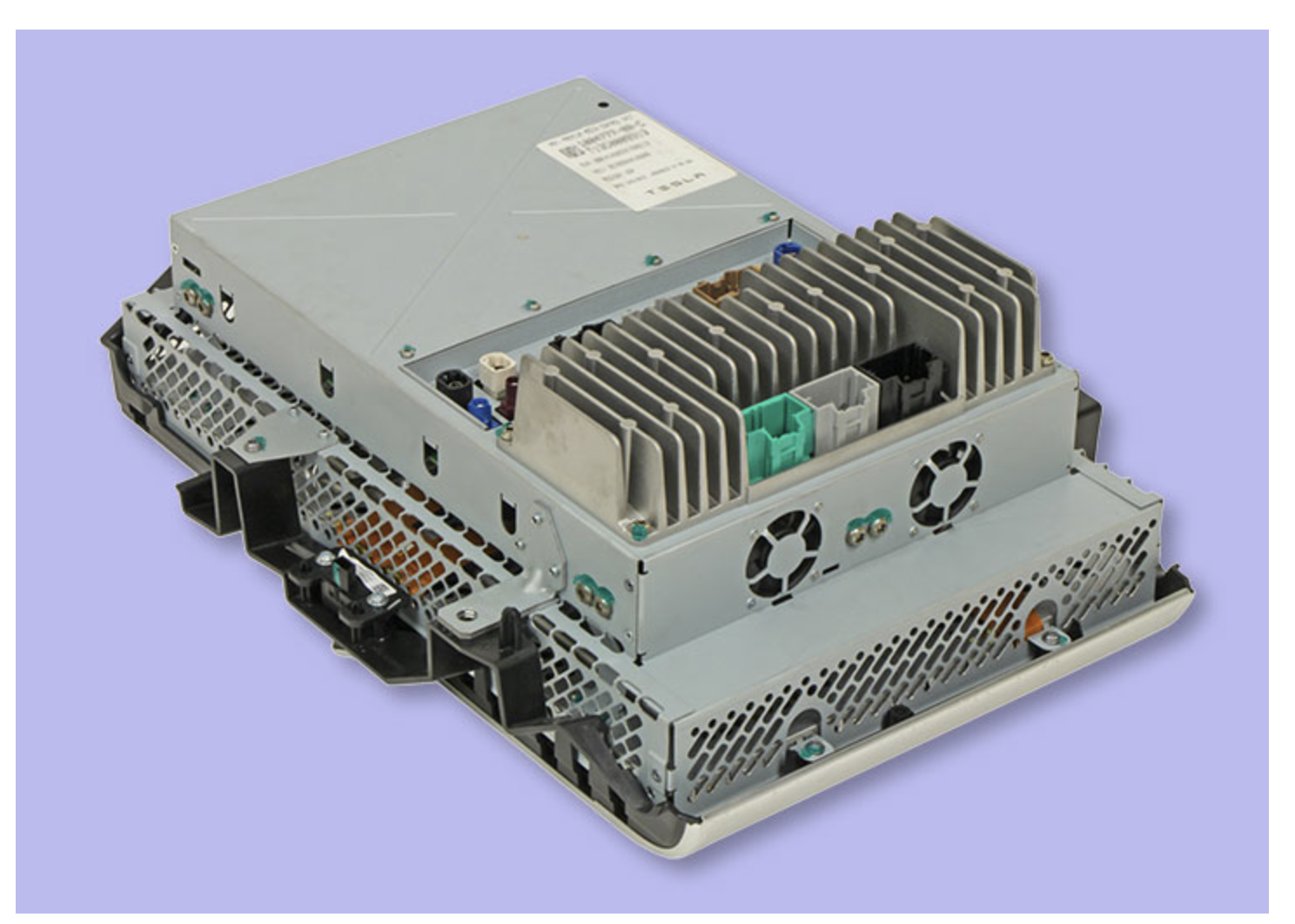
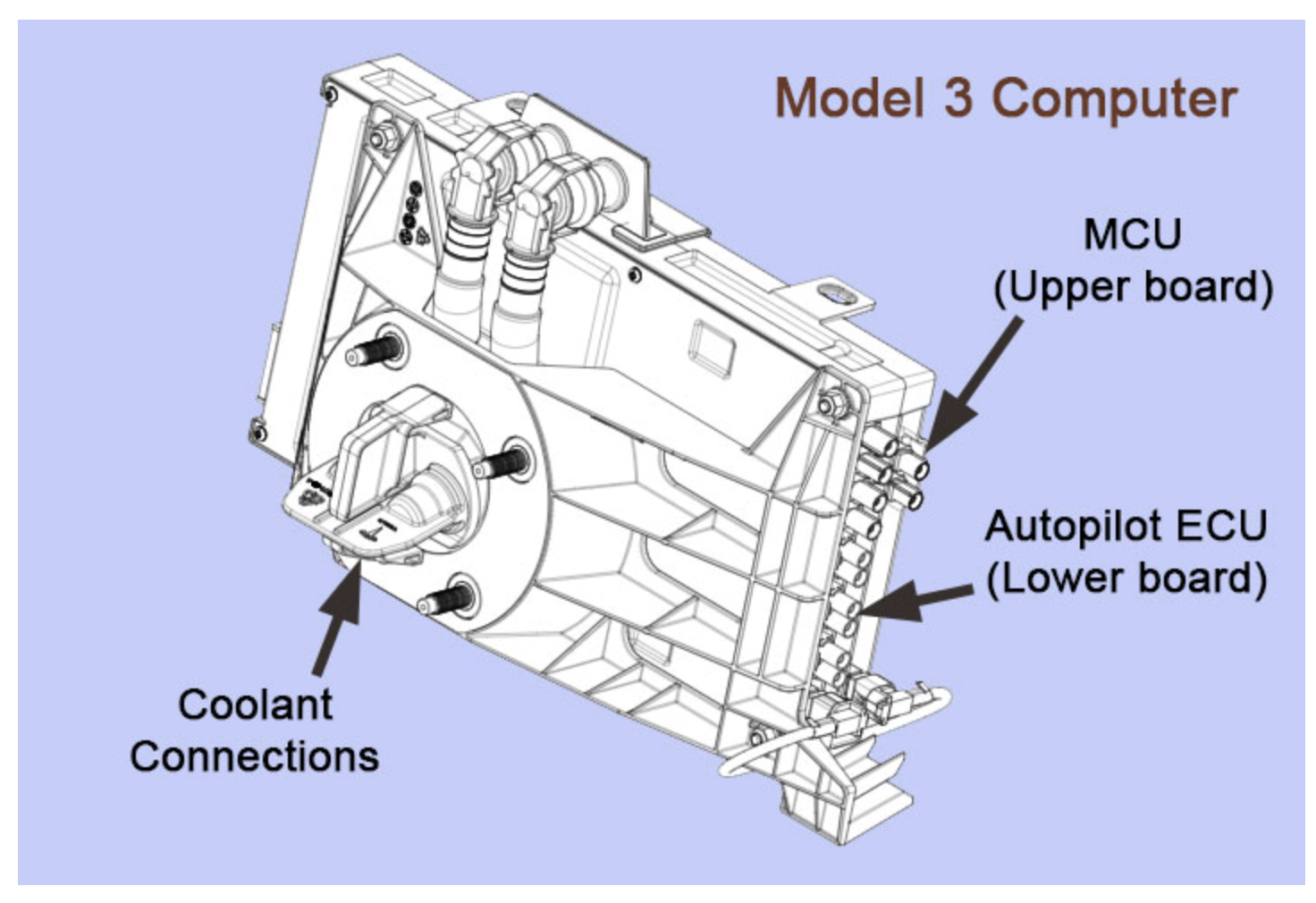
Model 3/Y 架构不同,显示器和 MCU 在不同的模块中。该 MCU 还使用与 2021 年 6 月之前的 S/X MCU2 相同的英特尔凌动处理器和其他组件。
MCU-Z
MCU-Z——这是 2021 年年中制造的 S/X 车辆中使用的最新模块。它是一个类似于 3/Y 的液冷模块,但配备了新的处理器。2021 年第四季度的中国 Model Y 似乎已改用 MCU-Z 的变体,预计所有汽车都可能在 2022 年的某个时候改用 MCU-Z 的变体。
它似乎使用了 AMD Navi 23 GPU,这是对之前 GPU 的重大升级。它处理 S/X 中的所有三台显示器,一台使用 HDMI,另外两台使用 DisplayPort。图形处理能力被认为接近同样使用 AMD GPU 的索尼 PS5。
该 CPU 是 AMD Ryzen 处理器, 比 MCU2 中的 Intel Atom 处理器有了显着的性能升级。
02 自动驾驶ECU处理器(AEP:Autopilot ECU Processor)
目前有四种与 Autopilot 相关的车辆硬件变体。
HW0
HW0 – 没有自动驾驶功能的早期 Model S。
HW1
HW1 – 第一个Autopilot,基于 Mobileye 芯片。它使用一个摄像头、雷达和 12 个中程超声波传感器。电子设备与摄像头位于同一位置,位于后视镜后面。
HW2.0
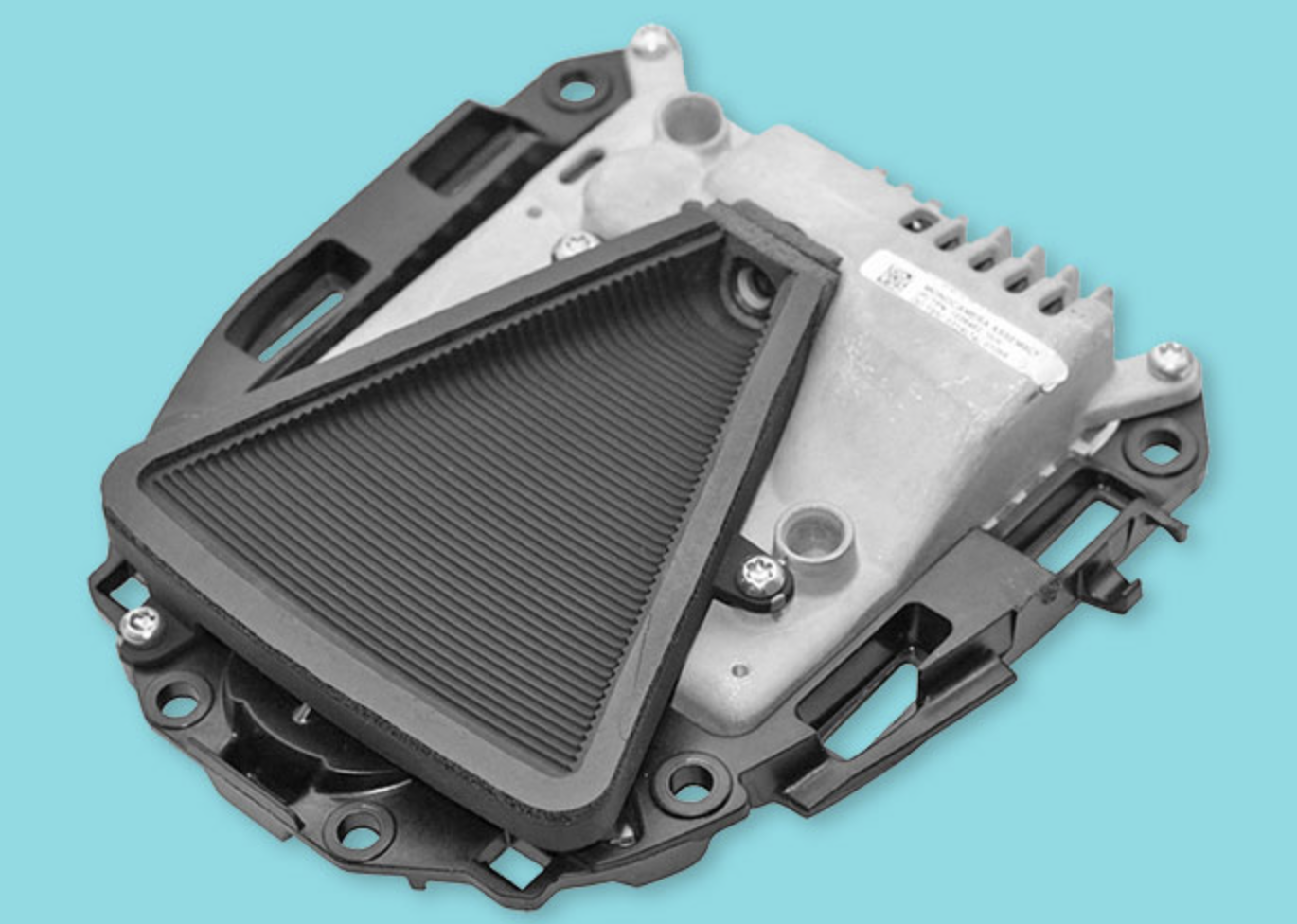
HW2.0—— 特斯拉第二代设计,采用8个摄像头、12个远程超声波传感器、1个前置雷达。特斯拉基于 Nvidia 的 Drive PX2 系统创建了一个全新的 ECU 处理器模块。该 ECU 位于手套箱下方。
HW2.5
HW2.5 – 这提供了对 HW2.0 的小更新,主要是为了冗余和略微提高的可靠性。该版本还使两个非自动驾驶功能成为可能——行车记录仪和带有本地保存视频的哨兵模式。

早期的 Model 3/Y Autopilot ECU 硬件类似于 HW2.5,但使用来自汽车冷却剂回路的液体冷却而不是风扇。
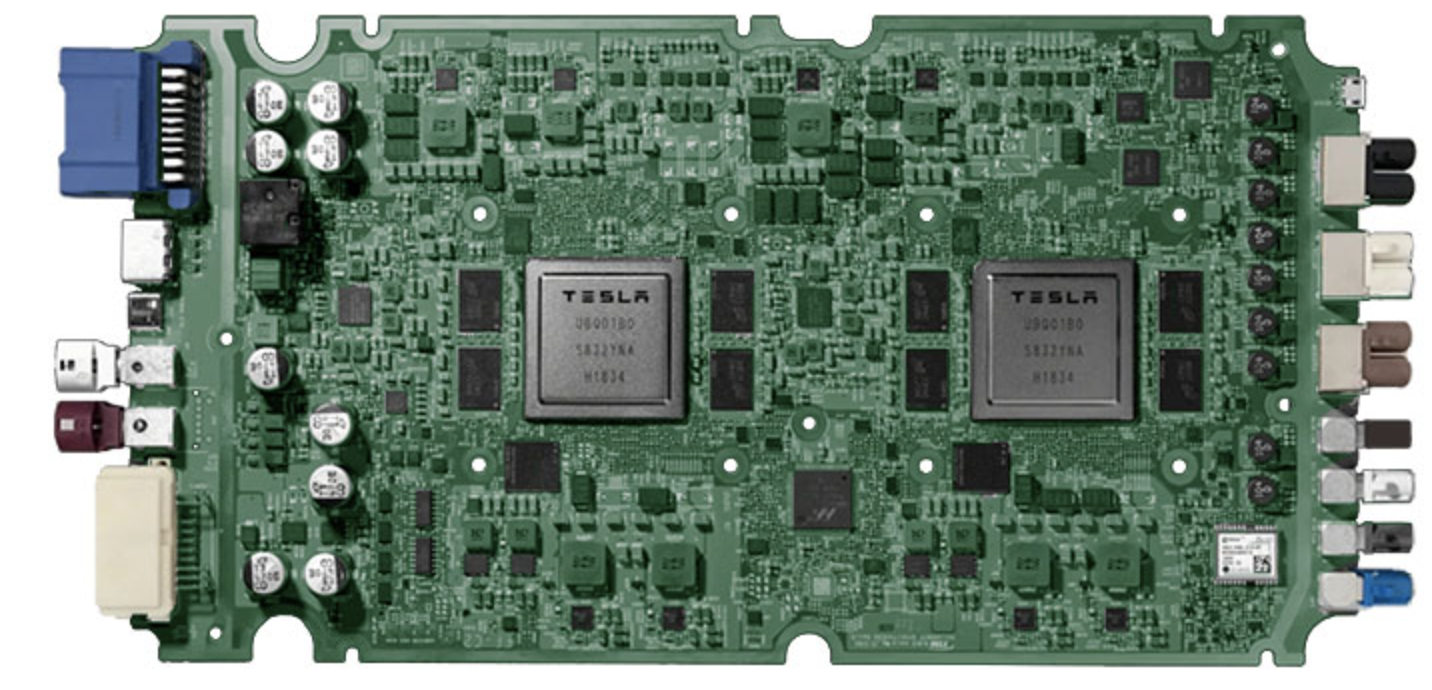
HW3
HW3 – 使用特斯拉自己的芯片设计对自动驾驶 ECU 进行重大更新。
HW4
HW4 – 使用特斯拉第二代芯片设计的自动驾驶 ECU 的未来更新正在开发中。预计其性能是 HW3 的 3 倍。特斯拉近期将发布HW4
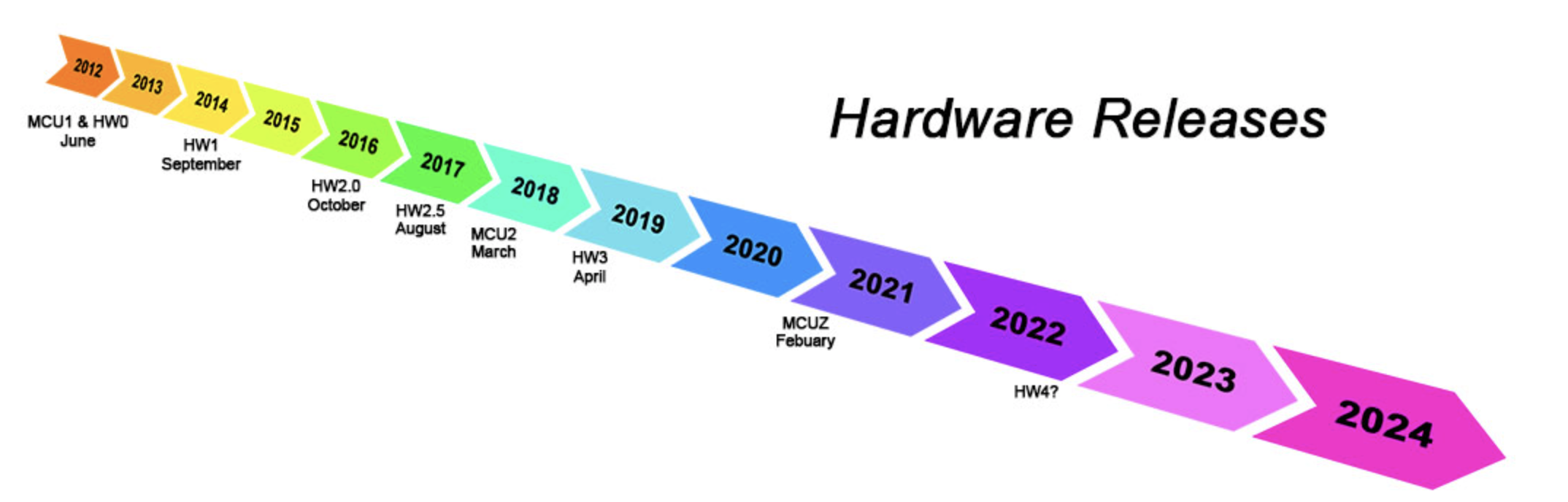
03 硬件发布顺序和时间表
| Hardware Level | Release Date Model S/X | Release Date Model 3/Y |
|---|---|---|
| MCU1 & HW0 | 22-Jun-2012 | n/a |
| HW1 | 17-Sep-2014 | n/a |
| HW2.0 | 1-Oct-2016 | n/a |
| MCU2 | 1-March-2018 | 28-Jul-2017* |
| HW2.5 | 1-Aug-2017 | 28-Jul-2017* |
| HW3 | 22-Mar-2019 | 12-Apr-2019** |
| MCUZ | 1-Feb-2021 | 1-Apr-2022 (estimate) |
| HW4 | Q4-2022 (Estimate) | Q4-2022 (Estimate) |
*-开始生产 Model 3,但硬件与 S/X 不同,CPU 与 S/X 相同。
** -2019 年夏季有少量汽车获得 HW2.5 AP 处理器而不是 HW3。
04 新车的硬件规格(无改装)
这涵盖了构成各种硬件版本的 Autopilot 系统的许多技术组件。
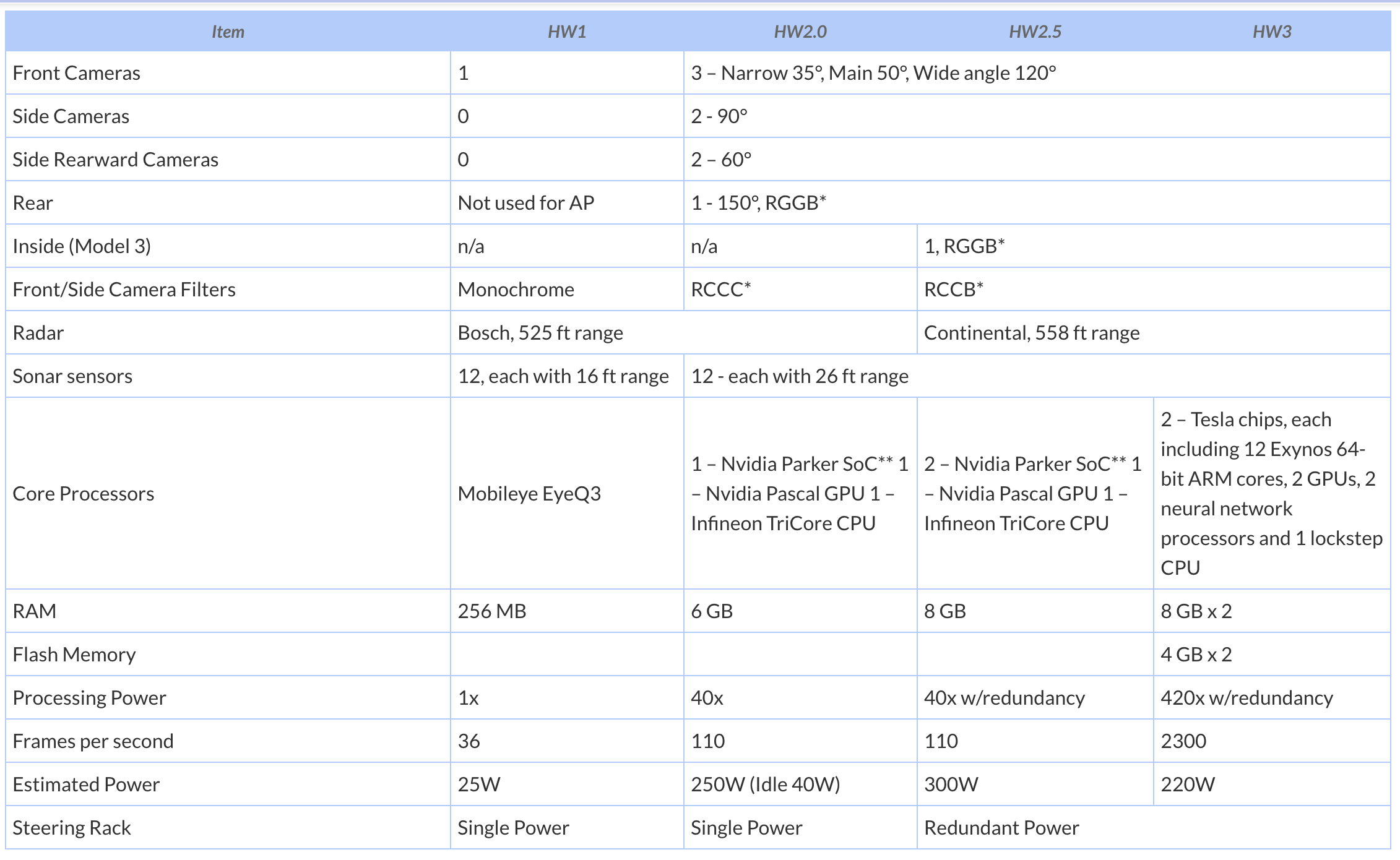
*-在相机中,每个像素由 4 个感光器表示,并带有滤镜组合:C=Clear、R=Red、G=Green、B=Blue。一个像素的多个相同过滤器增加了感光度。使用 RCCB,没有绿色过滤器来提高夜间光敏感度,可以计算绿色为行车记录仪制作彩色图像。
** -Pascal SoC 包括 2 个 Denver 和 4 个 ARM A57 CPU 内核以及一个 Pascal GPU
05 改装
对于具有 FSD 功能的旧车,那些购买了无限制全自动驾驶 (FSD) 的车主可以免费升级到 HW3 ECU 处理器。2019 年秋季开始对 HW2.5 车辆进行 HW3 升级,2020 年开始对 HW2.0 车辆进行 HW3 升级。
对于拥有 HW2.0 和 FSD 的车主,特斯拉在 2021 年底启动了一项免费改造计划,以更新 8 个摄像头中的 7 个。该程序由 VIN 和零件可用性控制。
包月的FSD也要求车上有HW3 ECU处理器。如果汽车没有 HW3 ECU 并且能够进行改装,则需要 1000 美元的费用才能获得 HW3 ECU。
对于HW2.0车主来说,HW3 ECU的加入,提供了FSD必备的硬件。它还启用了行车记录仪和哨兵模式功能,尽管 MCU1 的质量不是很好。 业主还可以将 MCU1 升级为 MCU2。
06 自动驾驶和安全相关功能
多年来,特斯拉Autopilot的术语发生了变化。第一个使用一个摄像头的自动驾驶系统现在被非正式地称为 AP1。从新硬件 HW2.0 开始,Tesla 将功能名称更改为增强型自动驾驶仪 (EAP),并具有多项额外功能。2019 年 3 月,特斯拉放弃了 EAP,并创建了一种成本更低、功能更少的自动驾驶仪,简称为 AP。4 月,这成为所有从网上订购的新车的标准配置(这不是特别订购的 Model 3 SR 的标准配置)。这个新的 AP 是 EAP 功能的一个子集,其他 EAP 功能被移动到 FSD(全自动驾驶)功能集中。
那些购买了 EAP 的所有者将继续获得所有 EAP 功能并在未来获得升级。例如智能召唤是一个 FSD 功能,但 EAP 所有者也有此功能。
FSD 功能是可选的,可以随新车一起购买,也可以稍后购买和激活。除了购买 FSD,特斯拉还计划提供按月订阅选项。订阅服务的详细信息和价格尚未确定。
以下特征图表仅适用于 2014 年 8 月 17 日及之后生产的车辆。早期的汽车没有任何这些功能。
| Feature | No AP | AP1 | AP* | EAP* | FSD* |
|---|---|---|---|---|---|
| Front Collision Avoidance | Yes | Yes | Yes | Yes | Yes |
| Lane Departure Warning | Yes | Yes | Yes | Yes | Yes |
| Lane Departure Avoidance | Yes* | No | Yes | Yes | Yes |
| Emergency Lane Departure Avoidance | Yes* | No | Yes | Yes | Yes |
| Side Collision Avoidance | Yes* | No*** | Yes | Yes | Yes |
| TACC | No | Yes | Yes | Yes | Yes |
| Autosteer, accelerate and brake | No | Yes | Yes | Yes | Yes |
| Autopark | No | Yes | No | Yes | Yes |
| Auto Lane Change | No | Yes** | No | Yes | Yes |
| Read Speed Signs | No | Yes | Yes | Yes | Yes |
| Summon | No | Yes | No | Yes | Yes |
| Smart Summon | No | No | No | Yes | Yes |
| Navigate on Autopilot | No | No | No | Yes | Yes |
| Respond to Traffic lights and stop signs | No | No | No | No | Yes |
| Full Self Driving | No | No | No | No | FutureFeature |
*- 需要 HW2.0 或更高版本或所有 Model 3/Y 车辆
** - AP1 需要在交通安全时进行确认
*** - 在 v8.0 软件之前可用,但无效并已删除
06 自动驾驶
下图显示了美国汽车工程师协会 (SAE) 定义的自动驾驶级别。
| SAE Level | 描述 | 监控者 |
|---|---|---|
| 0 | 没有自动化 | 司机 |
| 1个 | 辅助驾驶,通常带有巡航控制 | 司机 |
| 2个 | 具有转向、制动和在特定环境中转向的高级辅助驾驶 | 司机 |
| 3个 | 有条件的自动驾驶,但可能会要求司机接管 | 系统 |
| 4个 | 高度自动化驾驶,司机无需接管 | 系统 |
| 5个 | 全自动驾驶可以处理人类可以处理的任何事情。 | 系统 |
目前,特斯拉提供 2 级自动驾驶选项。特斯拉的目标是过渡到 3 级,并最终过渡到 5 级,称为 FSD。特斯拉在 2020 年初宣布,根据法规,部分 FSD 应在 2020 年底前上市。完整的 FSD 将取决于每个司法管辖区的完整软件开发和监管批准。
请记住,在某些情况下 FSD 将无法工作,在某些情况下人类也不应驾驶,尽管有些人会愚蠢地尝试。其中一些条件包括:
- 浓雾
- 大雪
- 道路上的厚积雪
- 冰雹
- 洪水
- 季风
- 强风(飓风和龙卷风)
- 大火席卷道路
- 熔岩流
- 泥石流
对于 99.99% 的日常驾驶,FSD 应该可以正常工作——就像人类一样。我们怀疑 FSD 在某些时候甚至可能与天气网络相关联,以确定是否存在到达目的地的障碍并就此问题提出建议。
07 零件号
| Item | Model | Part Number |
|---|---|---|
| MCU1 with display, early cars, no longer available | S/X | 1004777-00-A |
| MCU1 with updated display and LTE, the latest version | S/X | 1045006-00-J |
| MCU1 Internal Tegra board with 64 GB eMMC | S/X | 2728212-S0-B |
| MCU2 with display | S/X | 1451809-S0-B |
| MCUZ and Autopilot ECU | S/X | 1637790-S0-F |
| Autopilot ECU 2.0 | S/X | 1078321-00-C (MS) 1078321-70-C 1078321-70-D 1078321-70-G |
| Autopilot ECU 2.5 | S/X | 1125800-70-C 1125800-70-G |
| Autopilot ECU 3.0 | S/X | 1655000-00-F* 1655000-70-F |
| MCU2 and Autopilot ECU ** | 3/Y | 1566786-S0-E |
| MCUZ and Autopilot ECU | 3/Y | 1681271-S0-D |
*- 00 变体有 HDMI 端口,可能用于开发
** - MCU 和自动驾驶仪 ECU 是同一模块中的两块板,在功能上类似于 S/X MCU2 的计算机和Autopilot ECU


![[JVM]JVM内存模型,类加载过程,双亲委派模型](https://img-blog.csdnimg.cn/054d4b7f1d274f8493fbd8ceaa0c1b8d.png#pic_center)