加工机器人的AC主轴头和位置相关动力学特性
- 1. 位置依赖动态特性及其复杂性
- 2. AC主轴头
- 2.1 常见主轴头摆角结构
- 2.2 摆动机构
- 3. 加装AC主轴头的作用和局限性
- 4. 切削机器人的减速器类型
- 5. 其他并联结构形式
- 参考文献资料
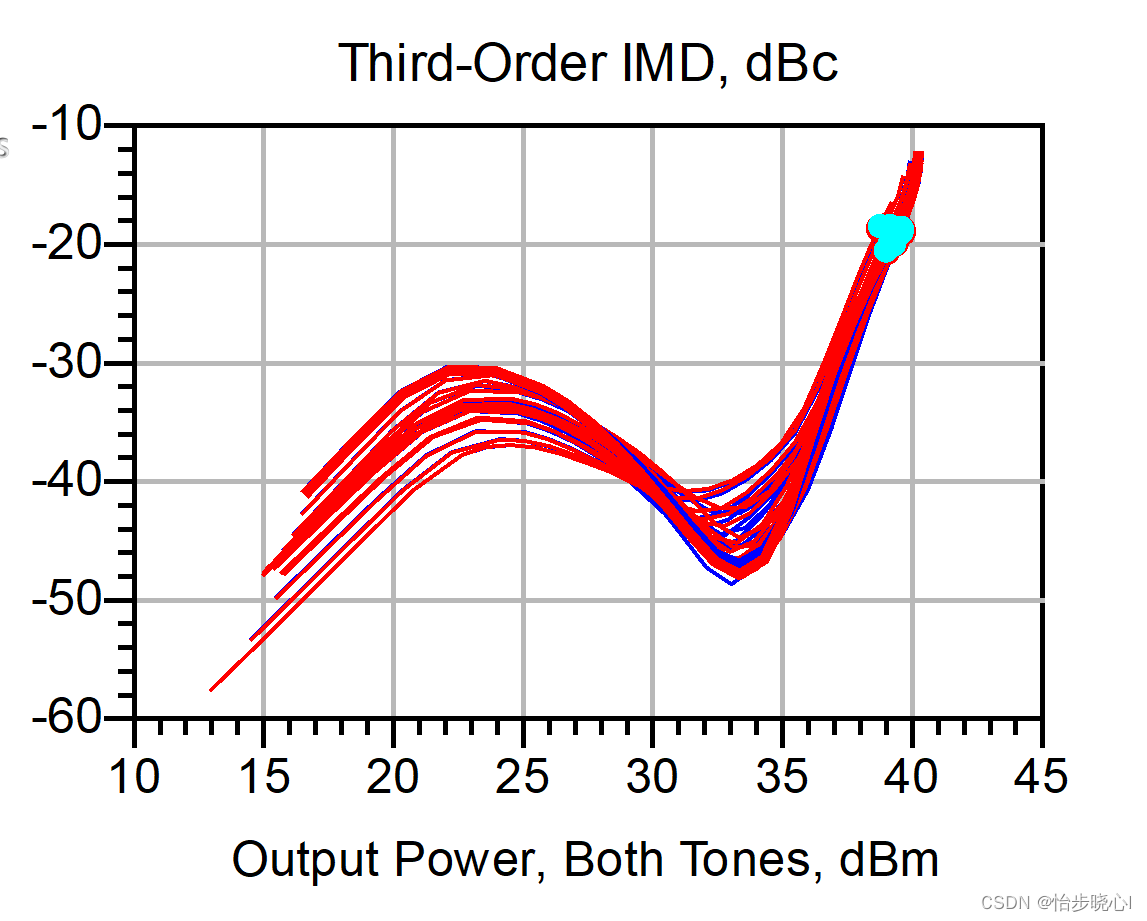
1. 位置依赖动态特性及其复杂性
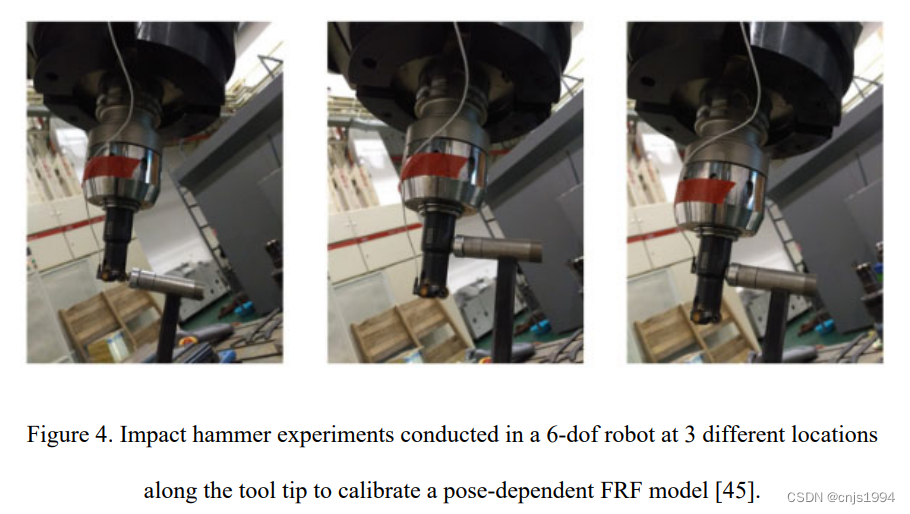
However, FRF measurements for off-line model calibration can only be conducted at discrete robot configurations and therefore require significant off-line testing effort to obtain adequate spatial resolution and coverage. Hence, a method to calibrate models using operational (e.g., machining) data can be useful for maximizing both testing efficiency and spatial resolution.
2. AC主轴头
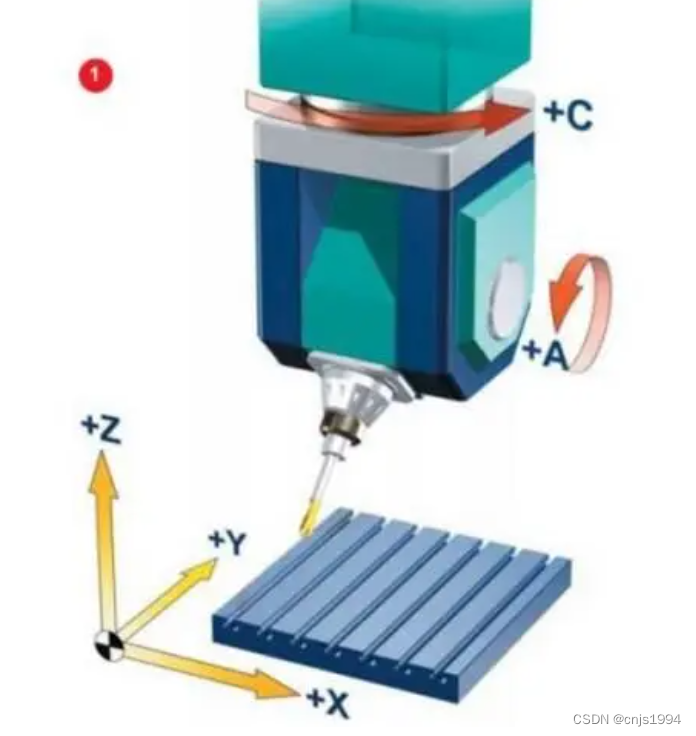
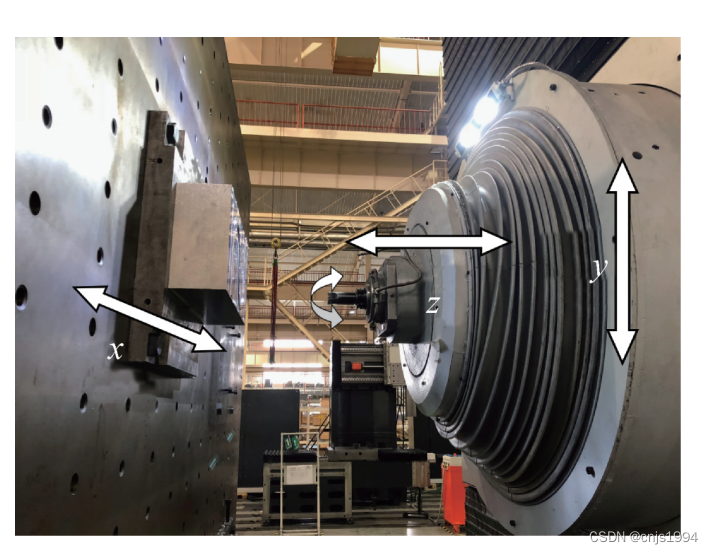
随着多轴联动技术的不断应用,在三轴加工的基础上添置了A、C两个旋转轴来完成五轴加工。把围绕着五轴加工中心X轴做旋转运动的轴,定义为A轴。五轴加工中心的工作台上都设有一个回转轴,这个回转轴围绕着Z轴做旋转运动,我们定义为C轴。A旋转轴的工作范围是+30度至-120度;C旋转轴的工作范围是360度回转。A旋转轴和C旋转轴组合的五轴加工中心。
2.1 常见主轴头摆角结构
-
两个摆动机构与坐标轴重合
-
与坐标轴不重合

-
摇篮式双转台

2.2 摆动机构
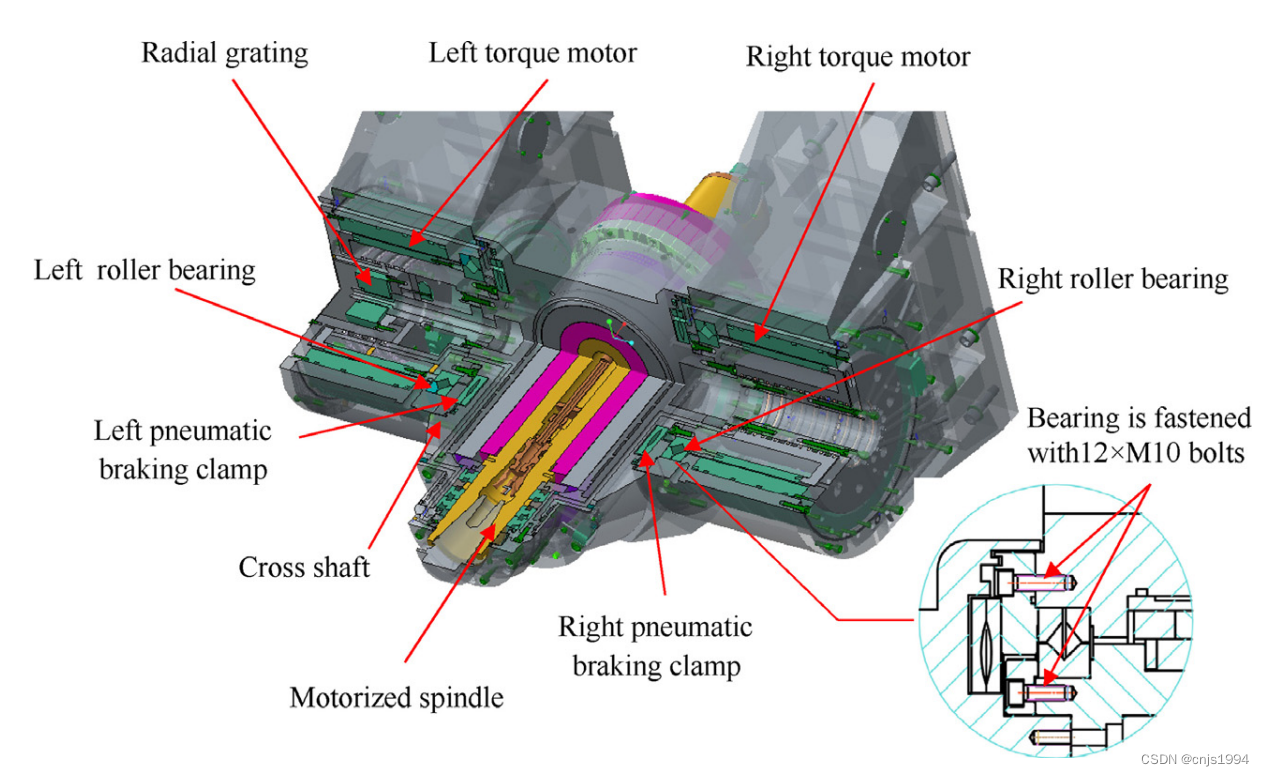
下图是文献【3】给出的一个典型的摆角机构,其由两个力矩马达,径向光栅,两个滚子轴承,两个气动制动夹钳和一个十字架轴组成。
3. 加装AC主轴头的作用和局限性
A旋转轴和C旋转轴一般最小分度值为0.001,这样可以加工除了安装面的其它面。在AC两轴的旋转参与下可进行加工倾斜面、倾斜孔等复杂工序加工。A旋转轴和C旋转轴可以和X、Y、Z直线三轴做五轴联动加工用来切削复杂的曲面工件,当然要完成复杂的加工工序需要数控系统、伺服电机系统和软件相互配合支持才行。
一般情况下具有AC旋转轴的五轴加工中心工作台设置不会太大,工作台承重也较小。特别是当A旋转轴回转到90度时或者大于90度时,加工工件时会给工作台带来很的承载力矩。
4. 切削机器人的减速器类型
-
谐波减速器
谐波减速机是用于负载小的工业机器人,或者是大型机器人末端几个轴,谐波减速机用于小型机器人特点是体积小、重量轻、承载能力大、运动精度高,单级传动比大。谐波减速机是谐波传动装置的其中一种,谐波传动装置包括了加速机和减速机。谐波减速机主要结构有刚轮、柔轮、轴承和波发生器,缺一不可。其中,刚轮的齿数略大于柔轮的齿数。 -
RV减速器
RV减速器是行星减速器大家族中常用的减速机之一。它是由齿轮和涡轮构成,结构紧凑,齿轮传动比大,在一定环境下具备锁紧基本功能。RV减速机常适用于扭矩较大的机器人关节中,具体是腿部腰部和肘部这三个关节,负载大的工业机器人,一二三轴用的都是RV减速机。RV减速机与谐波减速机相比具有更高的疲劳强度、刚度和寿命,谐波减速机的缺点还包括,随着使用时间增长,运动精度会降低,跟谐波减速机重量轻体积小的的优点相反,RV减速机的缺点是其重量重,外形尺寸较大。 -
两者比较
两者均为少齿差啮合,不同的是谐波中的一种关键齿轮具有柔性,需要反复高速变形,因而较为脆弱,所以谐波减速机的承载能力和使用寿命与RV减速机相比,承载能力低,寿命短。RV减速机一般用的是摆线针轮,谐波以前用的是渐开线齿形,现在有些厂家用的是双圆弧齿形,比渐开线更高级一些。与谐波减速机相比,RV减速机是一种新兴起的传动产品,RV减速机其实是早传统针线针轮减速机的基础上发展起来的,不仅克服了一般针摆传动的缺点,而且具有更多的优势,比如寿命长,保持精度稳定,效率高,传动顺畅等,体积小,重量轻,变速比范围大。
5. 其他并联结构形式
文献【2】研究了另一种并联形式:

参考文献资料
【1】斯图加特大学-相关博士论文
【2】基于遗传算法的并混联机床电机伺服控制参数整定
【3】Design and development of a five-axis machine tool with high accuracy,stiffness and efficiency for aero-engine casing manufacturing
【4】 常见五轴联动数控机床的摆角结构形式汇总