目录
- 什么是卷积神经网络
- 超参数的调整
- 学习率
- 迭代次数
- 批次大小
- 激活函数
- 隐含层的数目和单元数
- 权重初始化
- Dropout方法
- 网格搜索和随机搜索
- 神经网络优化算法介绍
- 优化算法分类
- 一阶优化梯度下降算法
- 二阶优化梯度下降算法
- 随机梯度下降(SDG)
- 小批量梯度下降
- 进一步优化梯度下降算法
- 动量方法
- Nesterov梯度加速法
- Adagrad方法
- AdaDelta方法
- Adam算法
在深度学习中,有许多不同的深度网络结构,包括卷积神经网络(CNN或convnet)、长短期记忆网络(LSTM)和生成对抗网络(GAN)等。
在计算机视觉领域,对卷积神经网络(简称为CNN)的研究和应用都取得了显著的成果。CNN网络最初的诞生收到了动物视觉神经机制的启发,目前已成功用于机器视觉等领域中。
什么是卷积神经网络
卷积神经网络是指一个网络中至少包含一个卷积层的神经网络。通常卷积神经网络是由:卷积层、池化层、非线性激活层、全连接层组成,最后输出对应的类别标签。
神经网络最初在手写数字识别上有着很好的效果,但是随着输入图片的复杂性与信息量加增,使之前的算法逐渐难以处理,而卷积神经网络的出现有效解决了这个问题。
卷积神经网络识别目标的过程,是先寻找诸如边缘、线段和曲线等相关低级特征,然后使用多个卷积层来构建更多抽象的高级特征。
在卷积层的学习过程中,CNN网络通过共享多个卷积核(或特征检测器)的权值,来学习每张图片的局部信息,并用于构建抽象特征图谱。卷积核共享特性大大降低了训练网络所需的参数量。由于经过训练的检测器可以通过卷积层重复用来组合地检测图片中的抽象特征,因此卷积神经网络更适用于复杂的图像识别任务。
超参数的调整
在进行深层卷积神经网络参数调节上也不是容易的,因为参数量大,训练起来很是费时间。
下面说几个常用的超参数:
学习率
学习率是指在优化算法中更新网络权重的幅度大小。学习率可以是恒定的、逐渐降低的、基于动量的或者是自适应的,采用哪种学习率取决于所选择优化算法的类型,如SGD、Adam、Adagrad、AdaDelta或RMSProp等算法。
迭代次数
迭代次数是指整个训练集输入到神经网络进行训练的次数。当测试错误率和训练错误率相差较小时,可认为当前的迭代次数是合适的,否则需继续增大迭代次数,或调整网络结构。
批次大小
在卷积神经网络的学习过程中,小批次会表现得更好,选取范围一般位于区间[16,128]内。
还需要注意的是,CNN网络对批次大小的调整十分敏感。
激活函数
激活函数具有非线性,理论上可以使模型拟合出任何函数。通常情况下,rectifier函数在CNN网络中的效果较好。当然,可以根据实际任务,选择其他类型的激活函数,如Sigmoid和Tanh等等。
隐含层的数目和单元数
增加隐含层数目以加深网络深度,会在一定程度上改善网络性能,但是当测试错误率不再下降时,就需要寻求其他的改良方法。增加隐含层数目也带来一个问题,即提高了训练该网络的计算成本。
当网络的单元数设置过少时,可能会导致欠拟合,而单元数设置过多时,只要采取合适的正则化方式,就不会产生不良影响。
权重初始化
在网络中,通常会使用小随机数来初始化各网络层的权重,以防止产生不活跃的神经元,但是设置过小的随机数可能生成零梯度网络。一般来说,均匀分布方法效果较好。
Dropout方法
作为一种常用的正则化方式,加入Dropout层可以减弱深层神经网络的过拟合效应。该方法会按照所设定的概率参数,在每次训练中随机地不激活一定比例的神经单元。该参数的默认值为0.5。
手动调整超参数是十分费时也不切实际。接下来介绍两种搜索最优超参数的常用方法。
网格搜索和随机搜索
网格搜索是通过穷举法列出不同的参数组合,确定性能最优的结构。随机搜索是从具有特定分布的参数空间中抽取出一定数量的候选组合。
网格搜索方法也需要制定策略,在初始阶段最好先确定各超参数值的大概范围。可以先尝试在较小迭代次数或较小规模的训练集上进行大步幅的网格搜索。然后在下个阶段中,设置更大的迭代次数,或是使用整个训练集,实现小幅精确定位。
虽然在许多机器学习算法中,通常会使用网格搜索来确定超参数组合,但是随着参数量的增大,训练网络所需的计算量呈指数型增长,这种方法在深层神经网络的超参数调整时效果并不是很好。
神经网络优化算法介绍
在调整模型更新权重和偏差参数的方式时,哪种优化算法能使模型产生更好且更快的效果?应该用梯度下降,随机梯度下降,还是Adam方法?
先说一下什么是优化算法?
优化算法的功能,是通过改善训练方式,来最小化(或最大化)损失函数E(x)。模型内部有些参数,是用来计算测试集中目标值Y的真实值和预测值的偏差程度的,基于这些参数,就形成了损失函数E(x)。
比如说,权重(W)和偏差(b)就是这样的内部参数,一般用于计算输出值,在训练神经网络模型时起到主要作用。
在有效地训练模型并产生准确结果时,模型的内部参数起到了非常重要的作用。这也是为什么我们应该用各种优化策略和算法,来更新和计算影响模型训练和模型输出的网络参数,使其逼近或达到最优值。
优化算法分类
在训练和优化智能系统时,梯度下降是一种最重要的技术和基础。梯度下降的功能是:通过寻找最小值,控制方差,更新模型参数,最终使模型收敛。
网络更新参数的公式为:θ=θ−η×∇(θ).J(θ) ,其中η是学习率,∇(θ).J(θ)是损失函数J(θ)的梯度。
这是在神经网络中最常用的优化算法。
如今,梯度下降主要用于在神经网络模型中进行权重更新,即在一个方向上更新和调整模型的参数,来最小化损失函数。
一阶优化梯度下降算法
最常用的一阶优化算法是梯度下降。这种算法使用各参数的梯度值来最小化或最大化损失函数E(x)。
函数梯度:导数dy/dx的多变量表达式,用来表示y相对于x的瞬时变化率。往往为了计算多变量函数的导数时,会用梯度取代导数,并使用偏导数来计算梯度。梯度和导数之间的一个主要区别是函数的梯度形成了一个向量场。
因此,对单变量函数,使用导数来分析;而梯度是基于多变量函数而产生的。
二阶优化梯度下降算法
二阶优化算法使用了二阶导数(也叫做Hessian方法)来最小化或最大化损失函数。由于二阶导数的计算成本很高,所以这种方法并没有广泛使用。
随机梯度下降(SDG)
随机梯度下降(Stochastic gradient descent,SGD)对每个训练样本进行参数更新,每次执行都进行一次更新,且执行速度更快。
θ=θ−η⋅∇(θ) × J(θ;x(i);y(i)),其中x(i)和y(i)为训练样本。
频繁的更新使得参数间具有高方差,损失函数会以不同的强度波动。这实际上是一件好事,因为它有助于我们发现新的和可能更优的局部最小值,而标准梯度下降将只会收敛到某个局部最优值。
但SGD的问题是,由于频繁的更新和波动,最终将收敛到最小限度,并会因波动频繁存在超调量。
虽然已经表明,当缓慢降低学习率η时,标准梯度下降的收敛模式与SGD的模式相同。
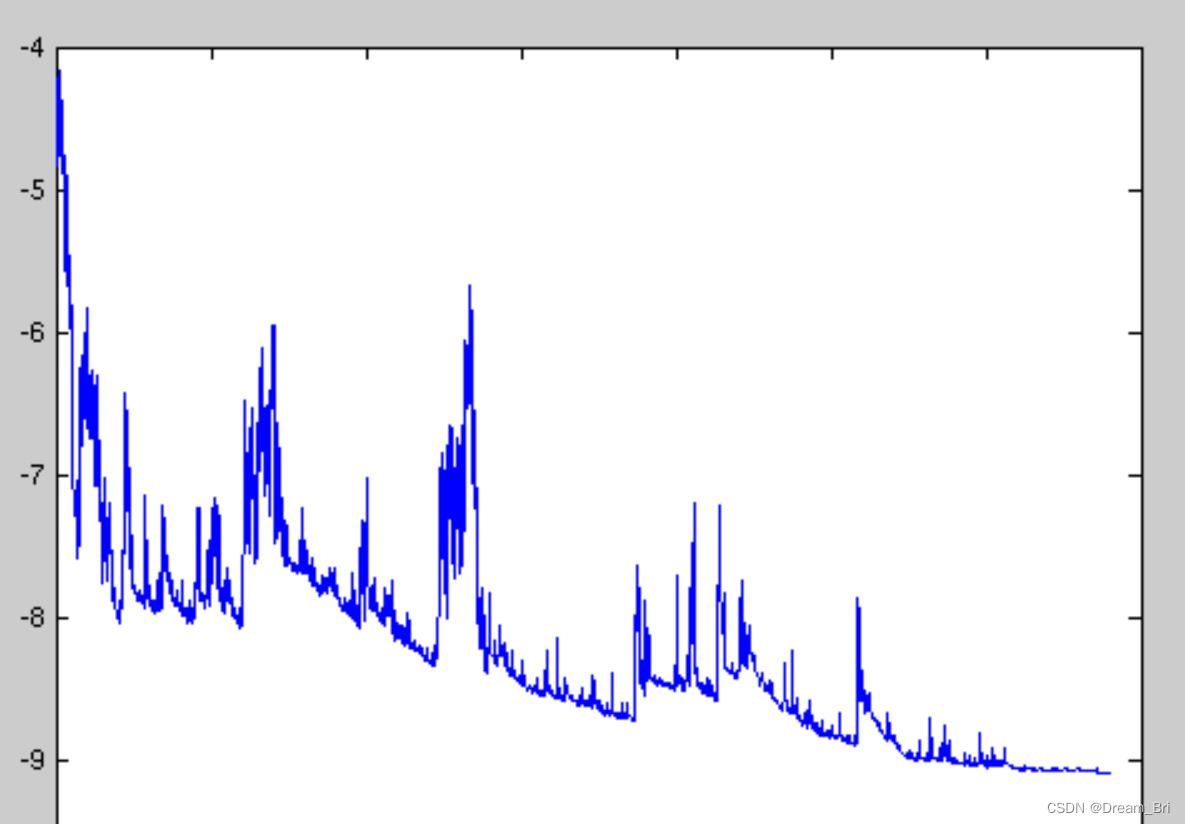
图示可以看出,每个训练样本中高方差的参数更新会导致损失函数大幅波动,因此我们可能无法获得给出损失函数的最小值。
小批量梯度下降
为了避免随机梯度下降和标准梯度下降中存在的问题,一个改进方法为小批量梯度下降(Mini Batch Gradient Descent),因为对每个批次中的n个训练样本,这种方法只执行一次更新。
使用小批量梯度下降的优点是:
1、可以减少参数更新的波动,最终得到效果更好和更稳定的收敛。
2、还可以使用最新的深层学习库中通用的矩阵优化方法,使计算小批量数据的梯度更加高效。
3、通常来说,小批量样本的大小范围是从50到256,可以根据实际问题而有所不同。
4、在训练神经网络时,通常都会选择小批量梯度下降算法。
进一步优化梯度下降算法
动量方法
随机梯度下降(SGD)方法中的高方差振荡使得网络很难稳定收敛,所以有研究者提出了一种称为动量(Momentum)的技术,通过优化相关方向的训练和弱化无关方向的振荡,来加速SGD训练。换句话说,这种新方法将上个步骤中更新向量的分量y添加到当前更新向量。
V(t)=γV(t−1)+η∇(θ).J(θ)
最后通过θ=θ−V(t)来更新参数。动量项γ通常设定为0.9,或相近的某个值。这里的动量与经典物理学中的动量是一致的,就像从山上投出一个球,在下落过程中收集动量,小球的速度不断增加。
在参数更新过程中,其原理类似:
1)使网络能更优和更稳定的收敛;
2)减少振荡过程。
当其梯度指向实际移动方向时,动量项γ增大;当梯度与实际移动方向相反时,γ减小。这种方式意味着动量项只对相关样本进行参数更新,减少了不必要的参数更新,从而得到更快且稳定的收敛,也减少了振荡过程。
Nesterov梯度加速法
一位名叫Yurii Nesterov研究员,认为动量方法存在一个问题:
如果一个滚下山坡的球,盲目沿着斜坡下滑,这是非常不合适的。一个更聪明的球应该要注意到它将要去哪,因此在上坡再次向上倾斜时小球应该进行减速。
实际上,当小球达到曲线上的最低点时,动量相当高。由于高动量可能会导致其完全地错过最小值,因此小球不知道何时进行减速,故继续向上移动。
Yurii Nesterov在1983年发表了一篇关于解决动量问题的论文,因此,我们把这种方法叫做Nestrov梯度加速法。
在该方法中,他提出先根据之前的动量进行大步跳跃,然后计算梯度进行校正,从而实现参数更新。这种预更新方法能防止大幅振荡,不会错过最小值,并对参数更新更加敏感。
Nesterov梯度加速法(NAG)是一种赋予了动量项预知能力的方法,通过使用动量项γV(t−1)来更改参数θ。通过计算θ−γV(t−1),得到下一位置的参数近似值,这里的参数是一个粗略的概念。因此,我们不是通过计算当前参数θ的梯度值,而是通过相关参数的大致未来位置,来有效地预知未来:
V(t)=γV(t−1)+η∇(θ)J( θ−γV(t−1) ),然后使用θ=θ−V(t)来更新参数。
现在,我们通过使网络更新与误差函数的斜率相适应,并依次加速SGD,也可根据每个参数的重要性来调整和更新对应参数,以执行更大或更小的更新幅度。
Adagrad方法
Adagrad方法是通过参数来调整合适的学习率η,对稀疏参数进行大幅更新和对频繁参数进行小幅更新。因此,Adagrad方法非常适合处理稀疏数据。
在时间步长中,Adagrad方法基于每个参数计算的过往梯度,为不同参数θ设置不同的学习率。
先前,每个参数θ(i)使用相同的学习率,每次会对所有参数θ进行更新。在每个时间步t中,Adagrad方法为每个参数θ选取不同的学习率,更新对应参数,然后进行向量化。为了简单起见,我们把在t时刻参数θ(i)的损失函数梯度设为g(t,i)。

Adagrad方法是在每个时间步中,根据过往已计算的参数梯度,来为每个参数θ(i)修改对应的学习率η。
Adagrad方法的主要好处是,不需要手工来调整学习率。大多数参数使用了默认值0.01,且保持不变。
Adagrad方法的主要缺点是,学习率η总是在降低和衰减。
因为每个附加项都是正的,在分母中累积了多个平方梯度值,故累积的总和在训练期间保持增长。这反过来又导致学习率下降,变为很小数量级的数字,该模型完全停止学习,停止获取新的额外知识。
因为随着学习速度的越来越小,模型的学习能力迅速降低,而且收敛速度非常慢,需要很长的训练和学习,即学习速度降低。
另一个叫做Adadelta的算法改善了这个学习率不断衰减的问题。
AdaDelta方法
这是一个AdaGrad的延伸方法,它倾向于解决其学习率衰减的问题。Adadelta不是累积所有之前的平方梯度,而是将累积之前梯度的窗口限制到某个固定大小w。
与之前无效地存储w先前的平方梯度不同,梯度的和被递归地定义为所有先前平方梯度的衰减平均值。作为与动量项相似的分数γ,在t时刻的滑动平均值仅仅取决于先前的平均值和当前梯度值。
AdaDelta方法的另一个优点是,已经不需要设置一个默认的学习率。
目前已完成的改进
1、为每个参数计算出不同学习率;
2)、也计算了动量项momentum;
3、防止学习率衰减或梯度消失等问题的出现。
还可以做什么改进?
在之前的方法中计算了每个参数的对应学习率,但是为什么不计算每个参数的对应动量变化并独立存储呢?这就是Adam算法提出的改良点。
Adam算法
Adam算法即自适应时刻估计方法(Adaptive Moment Estimation),能计算每个参数的自适应学习率。这个方法不仅存储了AdaDelta先前平方梯度的指数衰减平均值,而且保持了先前梯度M(t)的指数衰减平均值,这一点与动量类似。
在实际应用中,Adam方法效果良好。与其他自适应学习率算法相比,其收敛速度更快,学习效果更为有效,而且可以纠正其他优化技术中存在的问题,如学习率消失、收敛过慢或是高方差的参数更新导致损失函数波动较大等问题。
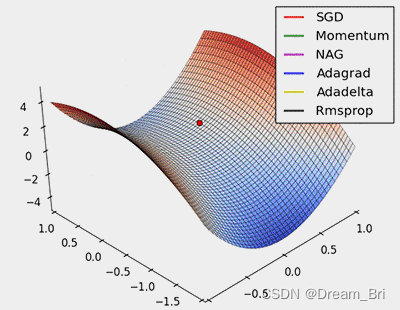
!](https://img-blog.csdnimg.cn/70cb3f578afe4c59b9020b3982767d9a.png)
参考:
https://zhuanlan.zhihu.com/p/27905191
https://web.stanford.edu/class/msande311/lecture13.pdf
https://www.sohu.com/a/149921578_610300